一种双绳垂吊台倾斜平衡系统的制作方法
1.本实用新型涉及一种垂吊台平衡系统,具体是一种双绳垂吊台倾斜平衡系统。
背景技术:
2.现有双绳垂吊台的方式(这里的双绳垂吊台指绳索吊起的物体如清洁设备、安装设备、涂漆设备、平台,特指载物垂平台)在高空作业的时候容易受风吹而产生晃动造成事故。
3.现有的双绳垂吊解决方案不能基于双绳垂吊台本身进行平衡。因此,本领域技术人员提供了一种双绳垂吊台倾斜平衡系统,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种双绳垂吊台倾斜平衡系统,能够基于双绳垂吊台本身进行平衡,通过垂吊台自身通过改变重心完成全自动平衡,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
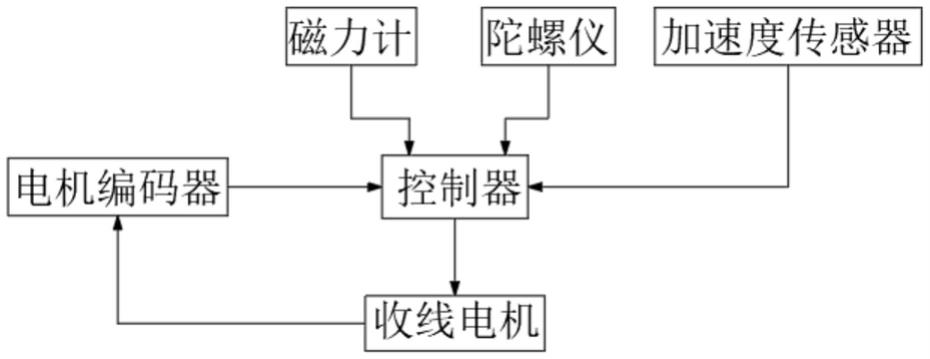
6.一种双绳垂吊台倾斜平衡系统,包括垂吊台以及控制器、磁力计、陀螺仪、加速度传感器、电机编码器、收线电机、两条绳索;
7.所述两条绳索的一端分别固定在垂吊台两侧,且两条绳索的另一端分别连接收线电机;所述磁力计、陀螺仪、加速度传感器与电机编码器均通信连接控制器,且控制器通信连接收线电机;
8.所述磁力计用于采集垂吊台摇摆的倾斜角度信息,并将倾斜角度信息传输给控制器,所述陀螺仪用于采集垂吊台摇摆的角度信息,并将角度信息传输给控制器,所述加速度传感器用于采集垂吊台摇摆的加速度信息,并将加速度信息传输给控制器,所述电机编码器用于采集两条绳索垂直下降的高度信息,并将下降高度信息传输给控制器,所述控制器构建平衡计算模型,并接收磁力计、陀螺仪、加速度传感器与电机编码器传来的倾斜角度信息、角度信息、加速度信息以及下降高度信息,将接收的信息输入平衡计算模型进行计算,输出计算结果给收线电机,所述收线电机接收计算结果后对两条绳索进行相应的收放;
9.所述平衡计算模型的具体计算过程为:
10.s1:以垂吊台出发点为原点为o(0,0,0),建立三轴坐标系;即在原点方位时候需要人为平衡,通过陀螺仪与磁力计的配合确保双绳垂吊台为作业最佳状态,并设为原点o(0,0,0),令所采集的两条绳索垂直下降的高度标记为l;
11.s2:当垂吊台平行于作业面晃动时,具体计算过程为:
12.s201:垂吊台单向移动至a(x,y,0),计算垂吊台倾斜角度,将其标记为ω,在倾斜开始时加速度传感器从开始记录晃动量从x=0到晃动顶
13.端x=x1,根据公式tanω=x1/l求得ω的值;
14.s202:初次晃动时,在垂吊台晃动方向的相反一侧的绳索进行收缩,其收缩量标记
为p,p=x1*sinω,当垂吊台从晃动顶点向原点晃动时收缩
15.一侧的吊绳跟随放绳,放绳量标记为q,q=x1*sinω;
16.s203:当采集到初次晃动顶端之后,后面的晃动收放方式以上一次量晃动顶点的量进行绳索收放,且次次摇摆的收绳方式在原点端开始就以上一次摇晃值x1顶点的量进行收绳,收绳量为q=x1*sinω,其放绳是
17.随x增大而放绳,放绳量等于p=x1*sinω;
18.s204:输出相应的收绳量与放绳量给收线电机进行收放线;
19.s3:当垂吊台垂直于作业面晃动时,具体计算过程为:
20.s301:垂吊台从原点o(0,0,0)单向移动至b(x,y,0),通过垂吊台在空中作减速或者加速度回到双绳垂吊台顶端原点0(0,0,0),即通过减少或者增加p与q的数值进行减少垂直晃动,通过加大绳索的拉力f使得垂吊台垂直于作业面的分力增大从而减少晃动;
21.s302:初次垂直于作业面减少晃动是跟随y的数量数值增加,而增加量为y=0到y=y1,其中这里的量指的是加速度,加速度包括减速与加速,根据条件优先采取减速;
22.s303:当垂吊台不平行受力晃动时,平衡方法也伴随着在加速度的过程当中,双绳垂吊台通过上述理论进行双绳垂吊台绳索单边收绳的方法,其方式是翘起幅度大的一侧采取下降的方式,其方式以y=0到y=y1增加而下降,其增加量为w=y1*sinω,其中,根据公式tanω=y1/l求得ω的值,因为伴随着加速度运动只要确保翘起幅度大的一侧为垂直地面下降即可;
23.s304:输出相应的增加量给收线电机进行收放线;
24.s4:当垂吊台因外力形成弧形晃动时,具体计算过程为:
25.s401:垂吊台从原点0(0,0,0)位移至c(x2,y2,z2);
26.s402:垂吊台平衡方案以先平衡y轴平衡再调节x轴平衡,首先通过提高向上f的加速度,再通过同受力方向z轴的作用力增加来减少y轴的方向的偏移,同时并收缩y轴变量大的一侧进行收缩提供一个额外的w=y2*sinω来加快y轴上的晃动,其中,根据公式tanω=y2/l求得ω的值;
27.s403:当y轴晃动解除再次进行x轴上的晃动,根据公式tanω=x2/l求得ω的值,求得p=q=x2*sinω;
28.s404:输出相应的计算结果给收线电机进行收放线。
29.本实用新型能够基于双绳垂吊台本身进行平衡,通过垂吊台自身通过改变重心完成全自动平衡。
30.作为本实用新型进一步的方案:所述磁力计、陀螺仪、加速度传感器集成在盒体内部,且盒体固定在垂吊台底端面中心位置。
31.该设置避免磁力计、陀螺仪、加速度传感器裸露在外容易受到损坏,且集成在一起提高信息采集的准确性。
32.作为本实用新型再进一步的方案:所述绳索的两端均活动安装有防震器。
33.防震器能够提高绳索的稳定性,减少绳索的晃动。
34.与现有技术相比,本实用新型的有益效果是:
35.本实用新型提供一种双绳垂吊平衡方案,通过垂吊台自身通过改变重心完成全自动平衡,基于垂吊台的绳索,通过收放绳索改变垂吊台重心实现平衡减少晃动的效果,垂吊
台受外力倾斜时,控制器与收线电机调节绳索长度实现减少晃动与减少晃动时间的效果,保护承载物体的安全性,提高承载设备作业效率。
附图说明
36.图1为一种双绳垂吊台倾斜平衡系统的结构框图;
37.图2为一种双绳垂吊台倾斜平衡系统中垂吊台平行于作业面晃动示意图;
38.图3为一种双绳垂吊台倾斜平衡系统中垂吊台垂直于作业面晃动示意图;
39.图4为一种双绳垂吊台倾斜平衡系统中垂吊台因外力形成弧形晃动示意图。
具体实施方式
40.请参阅图1~4,本实用新型实施例中,一种双绳垂吊台倾斜平衡系统,包括垂吊台以及控制器、磁力计、陀螺仪、加速度传感器、电机编码器、收线电机、两条绳索;所述两条绳索的一端分别固定在垂吊台两侧,且两条绳索的另一端分别连接收线电机;所述磁力计、陀螺仪、加速度传感器与电机编码器均通信连接控制器,且控制器通信连接收线电机;所述磁力计用于采集垂吊台摇摆的倾斜角度信息,并将倾斜角度信息传输给控制器,所述陀螺仪用于采集垂吊台摇摆的角度信息,并将角度信息传输给控制器,所述加速度传感器用于采集垂吊台摇摆的加速度信息,并将加速度信息传输给控制器,所述电机编码器用于采集两条绳索垂直下降的高度信息,并将下降高度信息传输给控制器,所述控制器构建平衡计算模型,并接收磁力计、陀螺仪、加速度传感器与电机编码器传来的倾斜角度信息、角度信息、加速度信息以及下降高度信息,将接收的信息输入平衡计算模型进行计算,输出计算结果给收线电机,所述收线电机接收计算结果后对两条绳索进行相应的收放;
41.所述平衡计算模型的具体计算过程为:
42.s1:以垂吊台出发点为原点为o(0,0,0),建立三轴坐标系;即在原点方位时候需要人为平衡,通过陀螺仪与磁力计的配合确保双绳垂吊台为作业最佳状态,并设为原点o(0,0,0),令所采集的两条绳索垂直下降的高度标记为l;
43.s2:当垂吊台平行于作业面晃动时,如图2所示,具体计算过程为:
44.s201:垂吊台单向移动至a(x,y,0),计算垂吊台倾斜角度,将其标记为ω,在倾斜开始时加速度传感器从开始记录晃动量从x=0到晃动顶
45.端x=x1,根据公式tanω=x1/l求得ω的值;
46.s202:初次晃动时,在垂吊台晃动方向的相反一侧的绳索进行收缩,其收缩量标记为p,p=x1*sinω,当垂吊台从晃动顶点向原点晃动时收缩一侧的吊绳跟随放绳,放绳量标记为q,q=x1*sinω;
47.s203:当采集到初次晃动顶端之后,后面的晃动收放方式以上一次量晃动顶点的量进行绳索收放,且次次摇摆的收绳方式在原点端开始就以上一次摇晃值x1顶点的量进行收绳,收绳量为q=x1*sinω,其放绳是随x增大而放绳,放绳量等于p=x1*sinω;
48.s204:输出相应的收绳量与放绳量给收线电机进行收放线;
49.s3:当垂吊台垂直于作业面晃动时,如图3所示,具体计算过程为:
50.s301:垂吊台从原点o(0,0,0)单向移动至b(x,y,0),通过垂吊台在空中作减速或者加速度回到双绳垂吊台顶端原点0(0,0,0),即通过减少或者增加p与q的数值进行减少垂
直晃动,通过加大绳索的拉力f使得垂吊台垂直于作业面的分力增大从而减少晃动;
51.s302:初次垂直于作业面减少晃动是跟随y的数量数值增加,而增加量为y=0到y=y1,其中这里的量指的是加速度,加速度包括减速与加速,根据条件优先采取减速;
52.s303:当垂吊台不平行受力晃动时,平衡方法也伴随着在加速度的过程当中,双绳垂吊台通过上述理论进行双绳垂吊台绳索单边收绳的方法,其方式是翘起幅度大的一侧采取下降的方式,其方式以y=0到y=y1增加而下降,其增加量为w=y1*sinω,其中,根据公式tanω=y1/l求得ω的值,因为伴随着加速度运动只要确保翘起幅度大的一侧为垂直地面下降即可;
53.s304:输出相应的增加量给收线电机进行收放线;
54.s4:当垂吊台因外力形成弧形晃动时,如图4所示,具体计算过程为:
55.s401:垂吊台从原点0(0,0,0)位移至c(x2,y2,z2);
56.s402:垂吊台平衡方案以先平衡y轴平衡再调节x轴平衡,首先通过提高向上f的加速度,再通过同受力方向z轴的作用力增加来减少y轴的方向的偏移,同时并收缩y轴变量大的一侧进行收缩提供一个额外的w=y2*sinω来加快y轴上的晃动,其中,根据公式tanω=y2/l求得ω的值;
57.s403:当y轴晃动解除再次进行x轴上的晃动,根据公式tanω=x2/l求得ω的值,求得p=q=x2*sinω;
58.s404:输出相应的计算结果给收线电机进行收放线。
59.本实用新型能够基于双绳垂吊台本身进行平衡,通过垂吊台自身通过改变重心完成全自动平衡。
60.在本实施例中:所述磁力计、陀螺仪、加速度传感器集成在盒体内部,且盒体固定在垂吊台底端面中心位置。该设置避免磁力计、陀螺仪、加速度传感器裸露在外容易受到损坏,且集成在一起提高信息采集的准确性。
61.在本实施例中:所述绳索的两端均活动安装有防震器。防震器能够提高绳索的稳定性,减少绳索的晃动。
62.本实用新型的工作原理是:该双绳垂吊台倾斜平衡系统在使用时,首先,将两条绳索的一端分别固定在垂吊台的两侧,再将绳索的另一端固定在楼顶的收线电机上,启动收线电机,使得垂吊台上升一定高度作为原点。此时的绳索被绷紧,此外,在原点方位时候需要人为平衡,通过陀螺仪与磁力计的配合确保双绳垂吊台为作业最佳状态,并设为原点o(0,0,0),令所采集的两条绳索垂直下降的高度标记为l。
63.当垂吊台平行于作业面晃动时,垂吊台单向移动至a(x,y,0),计算垂吊台倾斜角度,将其标记为ω,在倾斜开始时加速度传感器从开始记录晃动量从x=0到晃动顶端x=x1,根据公式tanω=x1/l求得ω的值。初次晃动时,在垂吊台晃动方向的相反一侧的绳索进行收缩,其收缩量标记为p,p=x1*sinω,当垂吊台从晃动顶点向原点晃动时收缩一侧的吊绳跟随放绳,放绳量标记为q,q=x1*sinω。当采集到初次晃动顶端之后,后面的晃动收放方式以上一次量晃动顶点的量进行绳索收放,且次次摇摆的收绳方式在原点端开始就以上一次摇晃值x1顶点的量进行收绳,收绳量为q=x1*sinω,其放绳是随x增大而放绳,放绳量等于p=x1*sinω。最后输出相应的收绳量与放绳量给收线电机进行收放线。
64.当垂吊台垂直于作业面晃动时,垂吊台从原点o(0,0,0)单向移动至b(x,y,0),通
过垂吊台在空中作减速或者加速度回到双绳垂吊台顶端原点0(0,0,0),即通过减少或者增加p与q的数值进行减少垂直晃动,通过加大绳索的拉力f使得垂吊台垂直于作业面的分力增大从而减少晃动。初次垂直于作业面减少晃动是跟随y的数量数值增加,而增加量为y=0到y=y1,其中这里的量指的是加速度,加速度包括减速与加速,根据条件优先采取减速。当垂吊台不平行受力晃动时,平衡方法也伴随着在加速度的过程当中,双绳垂吊台通过上述理论进行双绳垂吊台绳索单边收绳的方法,其方式是翘起幅度大的一侧采取下降的方式,其方式以y=0到y=y1增加而下降,其增加量为w=y1*sinω,其中,根据公式tanω=y1/l求得ω的值,因为伴随着加速度运动只要确保翘起幅度大的一侧为垂直地面下降即可。最后,输出相应的增加量给收线电机进行收放线;
65.当垂吊台因外力形成弧形晃动时,垂吊台从原点0(0,0,0)位移至c(x2,y2,z2)。垂吊台平衡方案以先平衡y轴平衡再调节x轴平衡,首先通过提高向上f的加速度,再通过同受力方向z轴的作用力增加来减少y轴的方向的偏移,同时并收缩y轴变量大的一侧进行收缩提供一个额外的w=y2*sinω来加快y轴上的晃动,其中,根据公式tanω=y2/l求得ω的值。当y轴晃动解除再次进行x轴上的晃动,根据公式tanω=x2/l求得ω的值,求得p=q=x2*sinω。最后输出相应的计算结果给收线电机进行收放线。
66.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1