一种无砟轨道智能巡检系统
1.本实用新型涉及轨道检测设备技术领域,具体涉及一种无砟轨道智能巡检系统。
背景技术:
2.无砟轨道指采用混凝土、沥青混合料等整体基础取代散粒碎石道床的轨道结构,又称为无碴轨道,是当前先进的轨道技术之一,无砟轨道避免了道砟飞溅,具有平顺性好、稳定性好、使用寿命长和耐久性好等优点,列车运行时速可达350千米以上。随着无砟轨道里程的增加,列车速度也逐渐提高,对铁路基础设施检测的需求也急速上升。无砟轨道线路开通以后,禁止人工上道巡视,导致传统的铁路基础设施状态检查和养护已经不能满足要求。
3.目前,无砟轨道铁路基础设施通过有线阵激光的连续扫描系统或面阵图像传感器的计算机视觉检测系统进行检测。然而,现有的线阵激光的连续扫描系统和计算机视觉检测系统的检测速度较低,通用性不高,需要人工进行过多的操作。并且,当现有的检测系统在对无砟轨道进行检测时,只能显示需要维修的无砟轨道的图像,检测系统难以识别需要维修的无砟轨道的图像的坐标位置,使得维修人员再次对需要维修的无砟轨道进行寻找,从而影响维修人员对无砟轨道的维修速度的情况。
技术实现要素:
4.针对现有技术存在的不足,本实用新型提出一种无砟轨道智能巡检系统,以解决现有的检测系统难以识别需要维修的无砟轨道的图像的坐标,维修人员需要对维修的无砟轨道进行再次寻找,导致不能及时对无砟轨道进行维修的问题。
5.为达到上述目的,本实用新型采用如下技术方案:一种无砟轨道智能巡检系统,包括车体、定位定资模块、检测模块、控制模块、数据传输模块和数据处理模块;
6.所述定位定资模块安装于所述车体上,用于采集无砟轨道的定位数据;
7.所述检测模块安装于所述车体上,用于采集无砟轨道的检测数据,所述定位定资模块和检测模块均与所述控制模块电连接,所述控制模块用于控制定位定资模块采集无砟轨道的定位数据,且控制检测模块采集无砟轨道的检测数据;
8.数据传输模块与所述控制模块通信连接,用于传输所述定位数据和所述检测数据,所述数据处理模块与所述数据传输模块通信连接,用于对所述定位数据和检测数据进行处理。
9.采用上述技术方案时,车体在无砟轨道上移动,控制模块控制定位定资模块和检测模块,使得定位定资模块对无砟轨道进行定位和图像的采集,进而形成定位数据,检测模块对无砟轨道进行检测,形成检测数据,定位数据和检测数据通过数据传输模块传输到数据处理模块中,再通过数据处理模块对定位数据和检测数据进行处理,使得定位数据与检测数据得到精确的匹配,便于维修人员能够快速的对需要维修的无砟轨道进行识别定位,从而加快对无砟轨道的维修速度。
10.优选的,所述定位定资模块包括gnss、惯性测量单元、里程计和激光扫描仪;所述gnss、惯性测量单元、里程计和激光扫描仪均与所述控制模块电连接,所述gnss、惯性测量单元、里程计和激光扫描仪均用于采集无砟轨道的定位数据。
11.通过gnss获取无砟轨道的位置及时间信息,惯性测量单元测量无砟轨道的姿态数据,同时通过里程计测量车体移动的里程数据,激光扫描仪采集无砟轨道沿线地物目标的数据,从而采集的无砟轨道的定位数据。
12.优选的,所述控制模块包括编码器和同步控制器,所述编码器与所述gnss、所述惯性测量单元、所述里程计、所述激光扫描仪和所述检测模块电连接,编码器用于对所述定位数据和所述检测数据进行信号转换;所述同步控制器与所述编码器电连接,用于控制定位定资模块采集无砟轨道的定位数据,且控制检测模块采集无砟轨道的检测数据,所述同步控制器与所述数据传输模块通信连接。
13.通过同步控制器和编码器的设置,同步控制器用于对控制定位定资模块定位和采集无砟轨道的定位数据,且控制检测模块定位数据的采集和定位,且通过编码器对定位数据和检测数据进行编码,便于传输。
14.优选的,所述数据传输模块为交换机。
15.通过交换机的设置,便于数据的传输。
16.优选的,所述数据处理模块为上位机,所述上位机与所述数据传输模块通信连接。
17.通过上位机便于对同步控制器进行控制,
18.优选的,所述检测模块包括离缝检测仪和裂缝测试仪;所述离缝检测仪和裂缝测试仪均与所述编码器电连接,所述离缝检测仪安装于所述车体的端部,用于检测无砟轨道的离缝数据,所述裂缝测试仪安装于所述车体上,用于检测无砟轨道的裂缝数据,所述离缝数据和所述裂缝数据组成所述检测数据。
19.离缝检测仪的设置,便于检测无砟轨道的离缝数据,同时,裂缝测试仪便于检测无砟轨道的裂缝数据,从而实现对无砟轨道进行检测。
20.进一步,还包括供电模块,所述供电模块与所述上位机电连接。
21.供电模块能够对上位机进行提供电源。
22.本方案产生的有益效果是:通过定位定资模块、检测模块、控制模块、数据传输模块和数据处理模块的设置。定位定资模块对无砟轨道进行定位和图像的采集,进而形成定位数据,检测模块对无砟轨道进行检测,形成检测数据,数据传输模块把定位数据和检测数据传输到数据处理模块进行处理,使得定位数据与检测数据得到精确的匹配,便于维修人员能够快速的对需要维修的无砟轨道进行精确定位,使得维修人员能够及时的对无砟轨道进行维修。
附图说明
23.为了更清楚地说明本实用新型具体实施方式,下面将对具体实施方式中所需要使用的附图作简单地介绍。在所有附图中,各元件或部分并不一定按照实际的比例绘制。
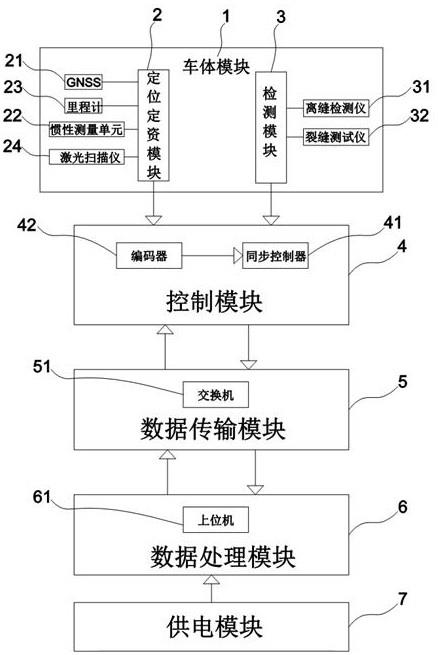
24.图1为本实用新型一种无砟轨道智能巡检系统的流程框图;
25.图2为本实用新型一种无砟轨道智能巡检系统中离缝检测仪的检测状态示意图;
26.图3为本实用新型一种无砟轨道智能巡检系统中裂缝测试仪的检测状态示意图。
27.附图标记:
28.1-车体、2-定位定资模块、21-gnss、22-惯性测量单元、23-里程计、24-激光扫描仪、3-检测模块、31-离缝检测仪、32-裂缝测试仪、4-控制模块、41-同步控制器、42-编码器、5-数据传输模块、51-交换机、6-数据处理模块、61-上位机、7-供电模块。
具体实施方式
29.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
30.请参阅图1-图3,一种无砟轨道智能巡检系统,包括车体1、定位定资模块2、检测模块3、控制模块4、数据传输模块5、数据处理模块6和供电模块7。
31.车体1用于安装在无砟轨道上,车体1能够在无砟轨道行驶,以便于对无砟轨道进行定位和检测。其中,车体1可选用能够在无砟轨道上行驶的轨道巡检小车。
32.定位定资模块2安装于车体1上,用于采集无砟轨道的定位数据。具体的,定位定资模块2包括gnss21、惯性测量单元22、里程计23和激光扫描仪24。gnss21、惯性测量单元22、里程计23和激光扫描仪24均与控制模块4电连接,gnss21、惯性测量单元22、里程计23和激光扫描仪24均用于采集无砟轨道的定位数据。通过gnss21获取无砟轨道的位置及时间信息,惯性测量单元22测量无砟轨道的姿态数据,同时通过里程计23测量车体1移动的里程数据,激光扫描仪24采集无砟轨道沿线地物目标的数据,从而采集的无砟轨道的定位数据。
33.其中,请一并参阅图2和图3,检测模块3安装于车体1上,用于采集无砟轨道的检测数据。具体的,检测模块3包括离缝检测仪31和裂缝测试仪32。离缝检测仪31和裂缝测试仪32均与控制模块4中的编码器42电连接,离缝检测仪31安装于车体1的端部,用于检测无砟轨道的离缝数据,本实施例中,车体1的左端和右端均安装有离缝检测仪31。裂缝测试仪32安装于车体1的底部,使得裂缝测试仪32位于无砟轨道的上方,用于检测无砟轨道的裂缝数据;本实施例中,裂缝测试仪32设有五个,五个裂缝测试仪32沿车体1的底部分布设置。同时,进而通过离缝数据和裂缝数据组成检测数据。离缝检测仪31便于检测无砟轨道的离缝数据,同时,裂缝测试仪32便于检测无砟轨道的裂缝数据,从而实现对无砟轨道进行检测。
34.控制模块4与定位定资模块2和检测模块3电连接,控制模块4用于控制定位定资模块2采集无砟轨道的定位数据,且控制检测模块3采集无砟轨道的检测数据。其中,控制模块4也可选择安装于车体1上,以便于与定位定资模块2和检测模块3电连接。本实施例中,控制模块4包括编码器42和同步控制器41,编码器42与gnss21、惯性测量单元22、里程计23、激光扫描仪24和检测模块3电连接,编码器42用于对定位数据和检测数据进行信号转换。同时,同步控制器41与编码器42电连接,用于控制定位定资模块2采集无砟轨道的定位数据,且控制检测模块3采集无砟轨道的检测数据,同步控制器41与数据传输模块5通信连接。码器对定位数据和检测数据进行信号编码转换,便于信号的传输。
35.同时,数据传输模块5与控制模块4通信连接,用于传输定位数据和检测数据。具体的,数据传输模块5为交换机51。也可选用wifi模块进行信号的传输。
36.数据处理模块6与数据传输模块5通信连接,用于对定位数据和检测数据进行处理。本实施例中,数据处理模块6为上位机61,上位机61与数据传输模块5通信连接。上位机
61便于对定位数据和检测数据进行快速的处理。同时,供电模块7与上位机61电连接。供电模块7用于对上位机61提供电源。同时,供电模块7也安装于车体1上,用于对车体1、定位定资模块2、检测模块3和控制模块4进行供电,供电模块7可选用锂电池组。
37.本以上技术方案的工作原理为:车体1启动后,车体1在无砟轨道上行驶,通过同步控制器41控制gnss21、惯性测量单元22、里程计23、激光扫描仪24、离缝检测仪31和裂缝测试仪32工作,通过gnss21、惯性测量单元22、里程计23和激光扫描仪24采集车体1在无砟轨道上移动的定位数据,同时,离缝检测仪31和裂缝测试仪32同步采集无砟轨道的检测数据,定位数据和采集数据通过编码器42进行数据转换,再通过交换机51的传输,传输到上位机61中,通过上位机61对定位数据和采集数据进行分析,从而对维修的无砟轨道进行精确定位,不仅便于维修人员能够及时的对无砟轨道进行维修,而且也节约维修人员的维修时间。
38.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1