一种泥水平衡盾构矩形掌子面稳定性控制模型试验装置的制作方法
1.本实用新型涉及泥水平衡盾构模型试验装置,具体是指一种泥水平衡盾构矩形掌子面稳定性控制模型试验装置。
背景技术:
2.随着隧道技术不断的发展,泥水平衡盾构的适用性逐渐凸显,尤其是在大跨径、砂土层掘进以及砂卵石地层掘进中的优势更加明显。泥水盾构掘进过程中,通过向刀盘密封舱内加入泥水(浆)来平衡矩形掌子面的水、土压力,刀盘的旋转切削和推进在泥水(浆)的环境下进行。在这种情况下,由于泥水压力过大或过小导致矩形掌子面失稳及地表沉降或隆起的事故时有发生。因此,作用在矩形掌子面上的泥水压力的控制就成为了保持矩形掌子面稳定性的重要因素。
3.类矩形盾构在施工过程中所占水平和垂直方向上地下空间都是最小的,可以节省施工工作量,在工程中逐渐多的应用起来。目前对泥水平衡盾构类矩形掌子面稳定性的研究主要包括理论研究、模型试验研究和数值计算研究,其中泥水平衡盾构矩形方面的研究主要是掘进过程中管片竖向沉降规律、管片被土现象、相邻建筑物或管线等对其影响等方面,而对类矩形泥水压力减小过程中矩形掌子面形态、破坏过程、位移、土压力等动态监测过程的研究较少。因此,进行泥水平衡盾构矩形掌子面变形和应力的实时量测,从而得到泥水盾构泥水压力减小过程的应力应变关系及矩形掌子面失稳模式具有十分重要的意义。
技术实现要素:
4.本实用新型提供一种泥水平衡盾构矩形掌子面稳定性控制模型试验装置,该装置通过压力水头控制支护压力,并通过对矩形掌子面变形和应力进行实时、精准的量测,从而获得泥水平衡盾构矩形掌子面失稳机理。
5.本使用新型采用如下技术方案:
6.一种泥水平衡盾构矩形掌子面稳定性控制模型试验装置,包括模型试验箱、矩形盾壳和蓄水箱;所述模型试验箱的侧壁采用透明材质制成,其上端敞口,箱内填有土样;所述矩形盾壳采用透明材质制成,其设置于模型试验箱内的土样中,矩形盾壳的前端敞口,并在敞口处设有一用于模拟掌子面的柔性膜,矩形盾壳中部设有用于存水的腔体,矩形盾壳的后端呈上下排布地设有连通于空腔内的进水管和泄水管;所述蓄水箱通过所述进水管连通于矩形盾壳的腔体内。
7.进一步,还包括一导砂槽,所述导砂槽的一端设置于所述柔性膜下方,另一端延伸至模型试验箱外部,用于将试验过程中产生的坍塌土样及时排出。
8.进一步,还包括采集仪以及电连接于所述采集仪的孔隙水压力传感器、土压传感器和位移传感器;若干所述孔隙水压力传感器和土压传感器均匀埋设于所述土样中,若干所述位移传感器设置于所述柔性膜的土样接触面。
9.进一步,还包括相机和led灯;所述相机设置于所述模型试验箱外部,用于实时拍
摄土样并进行piv图像分析;所述led灯设置于所述模型试验箱与相机之间,用于为模型试验箱提供光线。
10.进一步,所述进水管和泄水管均设有控水阀,并且进水管处装设有一水压计。
11.进一步,所述矩形盾壳通过若干支撑架设置于所述模型试验箱内。
12.进一步,所述矩形盾壳的顶部设有排气管。
13.进一步,所述蓄水箱标有刻度,蓄水箱内设有水压力计。
14.进一步,所述矩形盾壳由透明有机玻璃制成。
15.进一步,所述模型试验箱的四个侧壁均由透明有机玻璃制成,且模型试验箱的外表面设有钢架。
16.由上述对本实用新型结构的描述可知,和现有技术相比,本实用新型具有如下优点:
17.1、本实用新型所提供的试验装置结构简单,易于操作, 试验时,通过瞬时或缓慢降低矩形盾壳内水压引发的柔性膜发生形变,从而模拟泥水盾体矩形掌子面失稳破坏模式及破坏过程,有助于获取矩形掌子面极限泥浆压力,并指导泥水平衡盾构施工。
18.2、本实用新型配设有相机及各种传感器,能够监测矩形掌子面周围土样内土压力、管隙水压力和位移变化,并实时采集或者控制矩形盾壳内压力水头的变化,从而对泥水平衡盾构在不同覆土厚度、水位高度以及不同类型的土样条件下,泥浆压力降低过程中矩形掌子面土样的变形进行实时、精确的量测。
19.3、本实用新型所提供的试验装置可以对泥水平衡盾构矩形掌子面破坏形态和规律进行模拟,对比研究不同覆土厚度、水位高度以及不同类型的土样条件下泥水平衡盾构矩形掌子面破坏形态和规律;此外,本实用新型还可对泥水平衡盾构泥水压力降低过程中矩形掌子面土压、渗压及位移变化规律进行研究。
附图说明
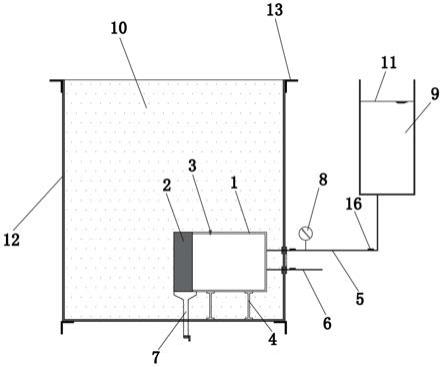
20.图1为本实用新型所提供的试验装置的主视图(未画出相机和lde灯)。
21.图2为本实用新型所提供的试验装置的侧视图(未画出钢架和导砂槽)。
22.图3为本实用新型中复合破坏体形态图。
23.图4为破坏复合体轨迹线。
24.图5为最大应变点和形心位置图。
25.图6为最大应变点和形心位置连线图。
26.图7为复合破坏体典型剖面图。
27.图8为复合破坏形态示意图。
28.图9为复合体体积变化图。
29.图中:1、矩形盾壳;2、柔性膜;3、排气管;4、支撑架;5、进水管;6、泄水管; 7、导砂槽;8、水压计;9、蓄水箱;10、土样;11、水位面;12、模型试验箱;13、钢架;14、相机;15、led灯;16、控水阀。
具体实施方式
30.下面参照附图说明本实用新型的具体实施方式。为了全面理解本实用新型,下面
描述到许多细节,但对于本领域技术人员来说,无需这些细节也可实现本实用新型。
31.如图1和图2所示,一种泥水平衡盾构矩形掌子面稳定性控制模型试验装置,包括模型试验箱12、矩形盾壳1和蓄水箱9;模型试验箱12的侧壁采用透明材质制成,其上端敞口,箱内填有土样10;矩形盾壳1采用透明材质制成,其设置于模型试验箱12内的土样10中,矩形盾壳1的前端敞口,并在敞口处设有一用于模拟掌子面的柔性膜2,矩形盾壳1中部设有用于存水的腔体,矩形盾壳1的后端呈上下排布地设有连通于空腔内的进水管5和泄水管6;蓄水箱9通过进水管连通于矩形盾壳1的腔体内。本实用新型所提供的试验装置结构简单,易于操作, 试验时通过瞬时或缓慢降低矩形盾壳1内水压引发柔性膜发生形变,从而模拟泥水盾体矩形掌子面失稳破坏模式及破坏过程,有助于获取矩形掌子面极限泥浆压力,并指导泥水平衡盾构施工。
32.如图1和图2所示,该试验装置还包括一导砂槽7,导砂槽7的一端设置于柔性膜2下方,另一端延伸至模型试验箱12外部,用于将试验过程中产生的坍塌土样及时排出。当矩形盾壳1内部压力减小时,柔性膜2会受到土样10的挤压而往矩形盾壳1内收缩时,土样则随之从导砂槽7中排出,由此真实形象地模拟出土样坍塌的坍塌过程。
33.如图1和图2所示,该试验装置还包括孔隙水压力传感器(图中未体现)、土压传感器(图中未体现)和位移传感器(图中未体现)。若干孔隙水压力传感器和土压传感器均匀埋设于土样中,若干位移传感器设置于柔性膜的土样接触面。各传感器均电连接于采集仪(图中未体现),并由采集仪统一控制和采集。具体地,本实施例共设置5个孔隙水压力传感器、5个土压传感器和6个位移传感器。其中,孔隙水压力传感器和土压传感器一一配对成组,四组位于同一竖直线上,这四组中最上部的一组位于矩形盾壳1的上方,余下的三组分别对应设置于矩形盾壳1的顶部、中部和底部;另外一组位于这四组的前方,且和对应于矩形盾壳1中部的一组前后间隔设置在同一水平线上。位移传感器从前到后均匀设为三排,每排布置两个,且中间的一排和柔性膜2处于同一竖直面上。模拟试验时,各传感器的数据由采集仪进行实时采集,通过土压传感器和孔隙水压力传感器对矩形掌子面(即柔性膜)前方的土样10进行监测,可以得到矩形掌子面前方土样失稳破坏时的土压和渗压变化规律,通过位移传感器对地表沉降进行监测,可以得到矩形掌子面破坏失稳前后地表沉降规律,由此为模拟试验更加准确可靠的数据支撑。
34.如图1和图2所示,该试验装置还包括相机14和led灯15;相机14设置于模型试验箱12外部,用于实时拍摄土样并进行piv图像分析;led灯14设置于模型试验箱12与相机14之间,用于为模型试验箱提供光线。作为优选方案,本实施例的相机采用cannon eos700d单反相机,lde灯15为两盏泛光led灯。具体地,该试验装置在测量时需要用到piv测量系统,piv测量系统包括硬件系统和软件系统两个部分,其中硬件系统主要由相机14、led灯15、图像采集及后处理设备等组成,软件系统采用德国lavision公司davis 8.0系列软件及pivview2c软件完成泥水盾构加压(泄压)全过程土样位移图像的采集分析与展示工作。piv测量系统放置在模型试验箱12外部,并位于柔性膜2的正前方,距离模型试验箱2m,便于对矩形掌子面侧面的土样进行实时拍照。
35.如图1和图2所示,蓄水箱9标有刻度,蓄水箱9内设有水压力计(图中未体现),进水管和泄水管上均设有控水阀16,并且进水管8处装设有一水压计。通过控制进出水的速度可有效控制矩形盾壳1内的水压,从而模拟出各种状态下柔性膜2及土样10的变化情况。
36.如图1和图2所示,作为优选方案:柔性膜2由具备防水和高耐磨性的橡胶材质制成,其通过皮筋等附件密封圈固于矩形盾壳1的敞口处。柔性膜2可在内外压力的变化下发生形变,由此准确地模拟出矩形掌子面的受力变化过程。
37.如图1和图2所示,作为优选方案:矩形盾壳1由透明有机玻璃制成,其顶部设有排气管3,底部通过若干支撑架4设置于模型试验箱12内。
38.如图1和图2所示,作为优选方案:模型试验箱12的四个侧壁均由透明有机玻璃制成,且模型试验箱12的外表面设有钢架13以使其整体结构更加牢固可靠。
39.如图1和图2所示,以下说明本实用新型的具体试验方法:
40.试验前,先将土样10铺设于模型试验箱12内,饱和并分层压实,使矩形盾壳1上方的覆土厚度为0.5倍盾构直径(在实际应用中可根据具体需求变换覆土厚度)。铺设土样10时,需要按预设的位置将孔隙水压力传感器、土压传感器和位移传感器埋设于土样10中。与此同时,往蓄水箱9内注入一定量的水,使矩形盾壳1内的水头高度和柔性膜2的土压力与水压力之和平衡,由此模拟泥水平衡状态,此时柔性膜2处于自然状态。开始试验前保持进水管5的两个控水阀16打开,并且关闭泄水管6上的控水阀。土压传感器、孔隙水压力传感器及位移传感器通过数据线与采集仪相连;调整led灯15光源位置,使矩形掌子面周围光线充足;调整相机14的位置、支架高度及焦距,使其对矩形掌子面周围土样能够完整地、清晰地拍摄。
41.试验开始后,打开采集仪和相机14,同时打开泄水管上的控水阀16,使矩形盾壳1内的水缓慢流出,从而使蓄水箱9水位降低,矩形掌子面泥水支护压力减小。观察矩形掌子面的柔性膜2及矩形掌子面的土样变化情况,并用相机14对矩形掌子面前方的土样进行摄像,可以得到矩形掌子面土样的位移矢量图和位移云图;通过土压传感器、孔隙水压力传感器对矩形掌子面前方土样进行监测,可以得到矩形掌子面前方土样失稳破坏时的土压和渗压变化规律;运用位移传感器对地表沉降进行监测,可以得到矩形掌子面破坏失稳前后地表沉降规律。当矩形掌子面前方土样位移突然变大,柔性膜 2发生明显变形,说明矩形掌子面前方土样发生主动破坏,此时关闭泄水管上的控水阀16,停止拍照,并结束监测数据的采集。
42.试验结束后,对监测结果进行数据处理,并对矩形掌子面失稳模式进行piv图像处理,进一步分析泥水平衡盾构矩形掌子面失稳模式,以及泥水压力降低过程中,矩形掌子面土样的变形、应力变化规律。
43.本实用新型可通过变化模型试验箱中土样的类型、矩形盾构1的覆土厚度以及水位高度进行不同工况的模拟,从而得到不同工况下泥水盾构矩形掌子面的失稳破坏机理。
44.如图1至图9所示,通过上述试验装置和试验方法可得到以下几个分析结果:
45.1、类矩形掌子面复合破坏模式
46.通过试验和综合计算分析得知,类矩形掌子面存在如下的破坏模式,即掌子面上的破坏截面基本为椭圆形,最终破坏体是椭圆形破坏面沿着破坏体轨迹线渐变到圆形球冠破坏面的复合破坏体,如图3和7所示。破坏过程为:在掌子面中上部压剪破坏,后扩展到整个掌子面、两个竖向侧边和顶面的拉剪破坏,扩展方向沿着破坏体轨迹线发生。
47.2、复合破坏体中心线的轨迹线及其方程表达式
48.根据试验和综合计算结果分析,复合破坏体轨迹线与破坏截面形心轨迹线基本一
73.h3——圆柱体底面圆形直径,h3=h2=2bcosα274.h4——椭圆形边界线,h4=h1sinα2=2bsinα275.h5——渐变区域外边界线,h5=h2×
π
×
α1/180
°
=α1/180
°×
2πb
×
cosα276.分别计算v1,v2,v3的体积:
77.(1)v1的体积:
[0078]v1
可视为椭圆(短轴为h2,长轴为2a)沿h4平移形成的椭球柱体积的一半。
[0079]
则:
[0080]
(2)v2的体积:
[0081]v2
是破坏面由椭圆形沿着轨迹线向圆形破坏面渐进变化的区域包围成的体积,该体积的椭圆形破裂面ac是其短轴,2a是其长轴,圆形破裂面的直径是ad。
[0082]v2
做近似计算分为两部分v
21
和v
22
,v2=(v
21
+v
22
)/2
[0083]v21
为椭圆(h2为短轴,2a为长轴)以a点为圆心,沿弧线h5旋转角度为α1后的体积,则
[0084]v22
为以h2为直径的圆,以a点为圆心沿弧线h5旋转角度为α1后的体积。
[0085]
则
[0086]
解得:
[0087]
(3)v3的体积:
[0088]v3
可视为压力拱形成的球冠,球冠高度为h6,r为球的斗拱,即r=h3/2=bcosα2,压力拱高度为
[0089]
则
[0090]
则总体积v的表达式为:
[0091]
(c)
[0092]
此处试验材料的φ=33.1
°
。
[0093]
根据现场实际情况,φ的变化范围在30
°
到36
°
之间,故可得出以下两种情况下总体积变化趋势。
[0094]
当现场实际类矩形泥水盾构施工时,类矩形的尺寸为a=11.5m,b=6.937m,φ分别为30
°
,31
°
,32
°
,33
°
,
……
,36
°
时,v的数值以及变化趋势如附表1和图9;
[0095]
②
当φ值固定,a和b的数值按比例各减少30%,50%时的v的数值以及变化趋势如附表1和图9。
[0096]
表1 复合破坏体体积
[0097][0098]
根据上述附图表,为方程应用,进行数值拟合,可知v的计算公式(c)可以简化为:
[0099]
v=(1.39a-7.35) φ+365a-1928
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(d)
[0100]
a是椭圆形的长半轴,φ是土样的内摩擦角。
[0101]
该方程可在已知类矩形掌子面尺寸的情况下,对不同内摩擦角φ的岩土样破坏形态和复合破坏体体积作出预估。
[0102]
上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1