一种基于MEMS惯组的导航控制器的制作方法
一种基于mems惯组的导航控制器
技术领域
1.本实用新型涉及导航控制技术领域,特别涉及一种基于mems惯组的导航控制器。
背景技术:
2.对大多数导航应用而言,精度并不是最重要的因素,在满足精度的前提下,尽可能降低成本、缩小体积才最重要,尤其是火箭弹及弹药。传统弹载组合导航控制器(光纤惯性器件)体积大、成本高、不能抗高过载。
3.mems惯性器件的测量精度已经达到了中低精度光纤惯性器件水平,并具备战术级制导应用,且mems惯性器件在价格、体积、抗过载方面具有明显优势,因此mems惯性器件必将取代价格高昂的光纤惯性器件应用于精确制导火箭弹及弹药。
技术实现要素:
4.针对现有技术中弹载组合导航控制器体积大、成本高的问题,本实用新型提出一种基于mems惯组的导航控制器,采用一体化集成设计减小控制器体积,具有对路对外的全双工rs422串口,从而对单机起到控制作用。
5.为了实现上述目的,本实用新型提供以下技术方案:
6.一种基于mems惯组的导航控制器,用于安装在弹体上,包括电源板、控制板、mems-imu和gps;
7.mems-imu,用于测量弹体在飞行中绕纵向、法向和横向轴转动的角速率和视加速度信号;控制板接收gps信号和mems-imu发送的角速率和视加速度信号,从而完成弹体姿态控制和制导控制,同时电源板完成配电。
8.优选的,所述控制板采用dsp+fpga结构,dsp通过emif总线与fpga连接;dsp作为主控芯片,用于完成控制器的主控功能,主控功能包括导航解算、飞行控制解算和时序控制;fpga作为dsp的外设,用于数据采集、串口扩展及配电控制。
9.优选的,所述串口扩展包括mems-imu通讯接口、数据记录接口、gps通讯接口、gps遥测通讯接口、地面测发控通讯接口、舵机通讯接口、导引头通讯接口、外设通讯接口、允许发射应答接口、允许发射接口和起飞信号接口。
10.优选的,配电控制的电路包括光电耦合器u1、第一mos管和第二mos管:
11.控制板发送配电控制信号到光电耦合器u1的输入端阴极,光电耦合器u1的输入端阳极通过第一电阻连接5v电压;光电耦合器u1的受光器的集电极分别与第一mos管的栅极和第二mos管的栅极连接,光电耦合器u1的受光器的发射极分别与第一mos管的源极和第二mos管的源极连接,第一mos管的漏极和第二mos管的漏极并联后与第二电阻的一端连接,第二电阻的另一端输出导引头时序供电控制信号或引信时序供电控制信号。
12.优选的,所述串口扩展的驱动电路包括磁隔离芯片u2:
13.磁隔离芯片u2的rxd端与fpga上的fpga_rxd端连接,磁隔离芯片u2的txd端与fpga上的fpga_txd端连接;磁隔离芯片u2的vcc端分别与3.3v电压、第一电容的一端和第二电容
的一端连接,第一电容的另一端和第二电容的另一端并联后与磁隔离芯片u2的gnd1端连接;磁隔离芯片u2的visoout端与visoin端并联后分别与第五电阻的一端、第三电容的一端、第四电容的一端和第五电容的一端连接,第五电阻的另一端分别与磁隔离芯片u2的a端、第六电阻的一端和第一二极管的一端连接,磁隔离芯片u2的b端、第六电阻的另一端、第一二极管的另一端并联后与第七电阻的一端连接,第三电容的另一端、第四电容的另一端、第五电容的另一端与第七电阻的另一端并联后与磁隔离芯片u2的gnd2端连接;磁隔离芯片u2的z端与第三电阻的一端连接,第三电阻的另一端与第二二极管的一端连接,第二二极管的另一端与第四电阻的一端连接,第四电阻的另一端与磁隔离芯片u2的y端连接。
14.优选的,所述允许发射接口包括光电耦合器u3:
15.控制台发送允许发射信号到允许发射接口的输入端,允许发射接口的输入端与第八电阻的一端连接,第八电阻的另一端分别与第九电阻的一端、第六电容的一端、第三二极管的负极、光电耦合器u3输入端阳极连接,第九电阻的另一端、第六电容的另一端、第三二极管的正极、光电耦合器u3输入端阴极并联后与第十电阻的一端连接,第十电阻的另一端接地;光电耦合器u3受光器的发射极接地,光电耦合器u3受光器的集电极分别与fpga和第十一电阻的一端连接,第十一电阻的另一端与3.3v电压连接。
16.优选的,所述起飞信号接口包括光电耦合器u4:
17.28v电压与第十二电阻的一端连接,第十二电阻的另一端分别与第十三电阻的一端、第七电容的一端、第四二极管的负极、光电耦合器u4输入端阳极连接,第十三电阻的另一端、第七电容的另一端、第四二极管的正极、光电耦合器u4输入端阴极并联后与第十四电阻的一端连接,第十四电阻的另一端与起飞信号接口的输入端连接;光电耦合器u4受光器的发射极接地,光电耦合器u4受光器的集电极分别与fpga和第十五电阻的一端连接,第十五电阻的另一端与3.3v电压连接。
18.优选的,所述允许发射应答接口包括光电耦合器u5:
19.fpga发送允许发射应答信号到允许发射应答接口输入端,允许发射应答接口输入端与第十六电阻的一端连接,第十六电阻的另一端分别与第十七电阻的一端、第八电容的一端、第五二极管的负极、光电耦合器u5输入端阳极连接,第十七电阻的另一端、第八电容的另一端、第五二极管的正极、光电耦合器u5输入端阴极并联后接地;光电耦合器u5受光器的发射极分别与控制台和第十八电阻的一端连接,第十八电阻的另一端接地,光电耦合器u5受光器的集电极连接3.3v电压。
20.综上所述,由于采用了上述技术方案,与现有技术相比,本实用新型至少具有以下有益效果:
21.该控制器采用mems-imu与gps卫星导航组合的方式实现弹体姿态控制与导航功能,还具有多路对外的全双工串口,同时完成时序配电。本实用新型采用一体化集成设计减小控制器体积,降低成本。
附图说明:
22.图1为根据本实用新型示例性的一种基于mems惯组的导航控制器结构示意图。
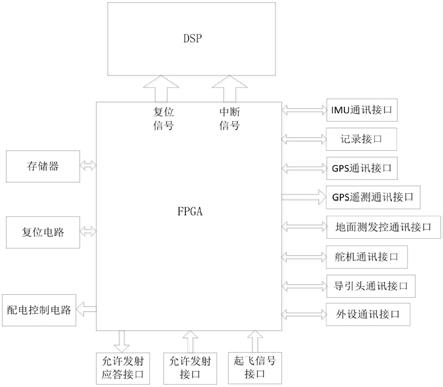
23.图2为根据本实用新型示例性的控制板结构示意图。
24.图3为根据本实用新型示例性的配电控制电路示意图。
25.图4为根据本实用新型示例性的对外接口的驱动电路示意图。
26.图5为根据本实用新型示例性的mems-imu和gps同步原理示意图。
27.图6为根据本实用新型示例性的允许发射接口电路示意图。
28.图7为根据本实用新型示例性的起飞信号接口电路示意图。
29.图8为根据本实用新型示例性的允许发射应答接口电路示意图。
具体实施方式
30.下面结合实施例及具体实施方式对本实用新型作进一步的详细描述。但不应将此理解为本实用新型上述主题的范围仅限于以下的实施例,凡基于本
技术实现要素:
所实现的技术均属于本实用新型的范围。
31.在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.如图1所示,本实用新型提供一种基于mems惯组的insgnss组合导航控制器,可安装在弹体上,包括电源板、控制板、mems-imu(micro electro mechanical system-inertial measurement unit,微机电系统-惯性测量单元)、gps(global positioning system,全球定位系统),mems-imu和gps分别和控制板双向连接,电源板为控制板、mems-imu和gps供电。该控制器采用mems-imu与gps卫星导航组合的方式实现弹体姿态控制与导航功能。
33.mems-imu,用于测量物体在飞行中绕纵向(x)、法向(y)和横向(z)轴转动的角速率和视加速度信号;
34.控制板接收gps信号,经过补偿、射前零位修正和组合导航计算给出导航参数,完成姿态控制和制导控制,同时完成时序配电。
35.电源板上安装有dc转dc隔离变压器、二极管等器件,具有输出电源隔离及分配功能,即将输入的地面供电和电池供电隔离,防止地面供电倒灌至电池供电,同时将地面供电和电池供电输出至其它设备。电源隔离是通过dc转dc隔离变压器实现隔离的。另外防倒灌采用的是二极管单向流通的特性,在电路中正极输出端添加二极管,电流只能正向流出,不能反向流回。
36.本实施例中,控制板采用dsp+fpga硬件架构。dsp作为主控芯片,用于完成控制器的主控功能(主控功能包括导航解算、飞行控制解算和时序控制);fpga作为dsp的外设,用于数据采集、串口扩展及配电控制。
37.如图2所示,控制板上的fpga通过emif总线发送复位信号和中断信号到dsp。fpga上设有多个对外接口(例如imu通讯接口、数据记录接口、gps通讯接口、gps遥测通讯接口、地面测发控通讯接口、舵机通讯接口、导引头通讯接口、外设通讯接口等),还设有“允许发射应答接口”、“允许发射接口”、“起飞信号接口”,fpga还与存储器、复位电路和配电控制电路连接。
38.如图3所示,配电控制电路包括导引头时序控制电路和引信时序控制电路,具体电
路图包括光电耦合器u1(vom1271t),第一mos管q1(最大电流100a)和第二mos管q2(最大电流100a):
39.控制板发送配电控制信号到光电耦合器u1的输入端阴极,光电耦合器u1的输入端阳极通过第一电阻r1连接5v电源(例如地面供电+d1或电池供电+b1);光电耦合器u1的受光器的集电极分别与第一mos管q1的栅极和第二mos管q2的栅极连接,光电耦合器u1的受光器的发射极分别与第一mos管q1的源极和第二mos管q2的源极连接,第一mos管q1的漏极和第二mos管q2的漏极并联后与第二电阻r2的一端连接,第二电阻r2的另一端输出导引头时序供电控制信号或引信时序供电信号。
40.如图4所示,fpga上设有多个对外接口,每个对外接口分别具备驱动电路,驱动电路包括磁隔离芯片u2(adm2682e),工作温度为-40℃~+85℃:
41.磁隔离芯片u2的rxd端与fpga上的fpga_rxd端连接,磁隔离芯片u2的txd端与fpga上的fpga_txd端连接;磁隔离芯片u2的vcc端分别与3.3v电压、第一电容c1的一端和第二电容c2的一端连接,第一电容c1的另一端和第二电容c2的另一端并联后与磁隔离芯片u2的gnd1端连接,磁隔离芯片u2的gnd1端接地;磁隔离芯片u2的visoout端与visoin端并联后分别与第五电阻r5的一端、第三电容c3的一端、第四电容c4的一端和第五电容c5的一端连接,第五电阻r5的另一端分别与磁隔离芯片u2的a端、第六电阻r6的一端和第一二极管d1(双向击穿二极管)的一端连接,磁隔离芯片u2的b端、第六电阻r6的另一端、第一二极管d1的另一端并联后与第七电阻r7的一端连接,第三电容c3的另一端、第四电容c4的另一端、第五电容c5的另一端与第七电阻r7的另一端并联后与磁隔离芯片u2的gnd2端连接;磁隔离芯片u2的z端与第三电阻r3的一端连接,第三电阻r3的另一端与第二二极管d2(双向击穿二极管)的一端连接,第二二极管d2的另一端与第四电阻r4的一端连接,第四电阻r4的另一端与磁隔离芯片u2的y端连接。
42.控制器上电后,mems-imu每1ms更新输出一次数据,gps每100ms更新输出一次数据,为保障gps信号数据与imu信号数据输出同步,本实施例中,采取gps秒脉冲同步设计,如图5所示:gps完成定位后,向控制板的fpga发送导航信息,同时发送秒脉冲信号,fpga检测到秒脉冲信号上升沿后向mems-imu发送触发信号,mems-imu在收到触发信号进行同步并在1ms内完成数据更新,之后发送反馈信号到fpga。
43.本实施例中,如图6所示,允许发射接口包括光电耦合器u3:
44.控制台发送允许发射信号到允许发射接口的输入端,输入端与第八电阻r8的一端连接,第八电阻r8的另一端分别与第九电阻r9的一端、第六电容c6的一端、第三二极管d3的负极、光电耦合器u3输入端阳极连接,第九电阻r9的另一端、第六电容c6的另一端、第三二极管d3的正极、光电耦合器u3输入端阴极并联后与第十电阻r10的一端连接,第十电阻r10的另一端接地;光电耦合器u3受光器的发射极接地,光电耦合器u3受光器的集电极分别与fpga和第十一电阻r11的一端连接,第十一电阻r11的另一端与3.3v电压连接。
45.本实施例中,如图7所示,起飞信号接口包括光电耦合器u4:
46.28v电压与第十二电阻r12的一端连接,第十二电阻r12的另一端分别与第十三电阻r13的一端、第七电容c7的一端、第四二极管d4的负极、光电耦合器u4输入端阳极连接,第十三电阻r13的另一端、第七电容c7的另一端、第四二极管d4的正极、光电耦合器u4输入端阴极并联后与第十四电阻r14的一端连接,第十四电阻r14的另一端与起飞信号接口的输入
端连接(控制台发送起飞信号到起飞信号接口的输入端);光电耦合器u4受光器的发射极接地,光电耦合器u4受光器的集电极分别与fpga和第十五电阻r15的一端连接,第十五电阻r1的另一端与3.3v电压连接。
47.本实施例中,如图8所示,允许发射应答接口包括光电耦合器u5:
48.控制板上的fpga发送允许发射应答信号到允许发射应答接口输入端,允许发射应答接口输入端与第十六电阻r16的一端连接,第十六电阻r16的另一端分别与第十七电阻r17的一端、第八电容c8的一端、第五二极管d5的负极、光电耦合器u5输入端阳极连接,第十七电阻r17的另一端、第八电容c8的另一端、第五二极管d5的正极、光电耦合器u5输入端阴极并联后接地;光电耦合器u5受光器的发射极分别与地面系统的控制台和第十八电阻r18的一端连接,第十八电阻r18的另一端接地,光电耦合器u5受光器的集电极与3.3v电压连接。
49.控制器收到地面系统的控制台发出的允许发射信号后,飞行控制软件进入允许发射中断,延时200ms,发出“允许发射应答”信号(ttl电平,(4.5v~5v)高有效,驱动能力≥10ma)给地面系统的控制台,地面系统的控制台进行光耦隔离,此信号在起飞前一直保持。
50.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1