一种激光转台相机的制作方法
1.本技术属于三维重建技术领域,尤其涉及一种激光转台相机。
背景技术:
2.三维重建是指对三维物体建立适合计算机表示和处理的数学模型,是在计算机环境下对其进行处理、操作和分析其性质的基础,也是在计算机中建立表达客观世界的虚拟现实的关键技术。现有技术中,利用激光相机从获取激光信息,从而根据激光信息重构出三维模型,但是现有的激光相机测量精度较低。
技术实现要素:
3.本技术的主要目的在于提供一种激光转台相机,旨在解决现有的激光相机测量精度较低的问题。
4.本技术实施例的第一方面提了一种激光转台相机,包括:
5.主控电路,被配置为响应于开机信号,向镜头模组和激光测距仪发送启动信号;接收拍摄命令,控制所述镜头模组和激光测距仪执行拍摄动作,接收镜头模组发送的平面图像信号,接收激光测距仪发送的激光信号,接收光敏传感器输出的光照信号,向屏幕板输出全景图像信号;
6.镜头模组,与所述主控电路连接,被配置为采集平面图像信号,向所述主控电路输出平面图像信号;
7.激光测距仪,与所述主控电路连接,被配置为采集激光信号,向所述主控电路输出所述激光信号;
8.光敏传感器,与所述主控电路连接,用于采集光照信号,向所述主控电路发送光照信号;
9.屏幕板,与所述主控电路连接,用于接收主控电路输出的全景图像信号,显示所述全景图像信号。
10.在第一方面的一种可选的实施方式中,所述主控电路包括电源电路、屏幕连接电路、镜头模组连接电路、光敏传感器连接、通信电路、第一控制电路、测距仪连接电路以及第一控制电路;
11.所述电源电路,被配置为分别向屏幕连接电路、镜头模组连接电路、光敏传感器连接、通信电路、第一控制电路、测距仪连接电路以及第一控制电路供电;
12.所述第一控制电路,被配置为接收开机信号,向所述模组连接电路和所述测距仪连接电路发送启动信号;接收所述通信电路发送的拍摄指令,分别向所述镜头模组连接电路和所述测距仪连接电路发送控制信号,接收所述镜头模组连接发送的平面图像信号,接收所述测距仪连接电路发送的激光信号,向所述屏幕连接电路输出全景图像信号;
13.所述镜头模组连接电路,分别与所述镜头模组以及所述第一控制电路连接,被配置为发送启动信号至所述镜头模组,发送控制信号至所述镜头模组,接收所述镜头模组发
送的平面图像信号并输出至所述第一控制电路;
14.所述测距仪连接电路,分别与所述激光测距仪以及所述第一控制电路连接,被配置为发送启动信号至所述激光测距仪,发送控制信号至所述激光测距仪,接收所述激光测距仪发送的激光信号并输出至所述第一控制电路;
15.所述通信电路,分别与用户终端以及所述第一控制电路连接,被配置为接收用户终端发送的拍摄指令,输出所述拍摄指令至所述第一控制电路;
16.所述光敏传感器连接电路,分别与所述光敏传感器以及所述第一控制电路连接,被配置为接收所述光敏传感器发送的光照信号,输出所述光照信号至所述第一控制电路;
17.所述屏幕连接电路,分别与所述屏幕板以及所述第一控制电路连接,被配置为接收所述第一控制电路发送的全景图像信号,输出所述全景图像信号至所述屏幕板。
18.在第一方面的一种可选的实施方式中,所述主控电路还包括陀螺仪电路;
19.所述陀螺仪电路,分别与陀螺仪以及所述第一控制电路连接,被配置为采集所述陀螺仪的imu信号,输出所述imu信号至所述第一控制电路。
20.在第一方面的一种可选的实施方式中,所述主控电路还包括gps电路;
21.所述gps电路,与所述第一控制电路连接,被配置为输出gps信号至所述第一控制电路。
22.在第一方面的一种可选的实施方式中,所述主控电路还包括第二控制电路以及底部电机电路;
23.所述第二控制电路,分别与所述第一控制电路以及所述底部电机电路连接,被配置为接收所述第一控制电路发送的电机控制指令,向所述底部电机电路发送电机转动命令,指示所述底部电机电路控制电机执行转动动作;
24.所述底部电机电路,分别与所述第二控制电路以及所述电机连接,被配置为接收所述第二控制电路发送的电机转动命令,控制所述电机执行转动动作。
25.在第一方面的一种可选的实施方式中,所述光敏传感器连接电路包括第一光敏传感器连接电路和第二光敏传感器连接电路;
26.所述第一光敏传感器连接电路分别与所述光敏传感器以及所述第二光敏传感器连接电路连接,所述第二光敏传感器连接电路分别与所述第一光敏传感器连接电路以及所述第一控制电路连接。
27.在第一方面的一种可选的实施方式中,所述测距仪连接电路包括交换机控制电路、第一交换机连接电路、第二交换机连接电路、第三交换机连接电路、第四交换机连接电路、信号转换电路、第一测距仪连接电路、第二测距仪连接电路以及第三测距仪连接电路;
28.所述交换机控制电路分别与所述第一交换机连接电路、第二交换机连接电路、第三交换机连接电路、第四交换机连接电路连接;
29.所述第四交换机与所述信号转换电路连接;
30.所述信号转换电路与所述第一控制电路连接;
31.所述第一交换机连接电路与所述第一测距仪连接电路连接,所述第二交换机连接电路与所述第二测距仪连接电路连接,所述第二交换机连接电路与所述第一测距仪连接电路连接;
32.所述第一测距仪连接电路、所述第二测距仪连接电路以及所述第三测距仪连接电
路分别与所述激光测距仪连接。
33.在第一方面的一种可选的实施方式中,所述陀螺仪电路包括第一陀螺仪电路以及第二陀螺仪电路;
34.所述第一陀螺仪电路分别与所述陀螺仪以及所述第二陀螺仪电路连接;
35.所述第二陀螺仪电路分别与所述第二陀螺仪电路以及所述第一控制电路连接。
36.在第一方面的一种可选的实施方式中,所述第二控制电路包括电压转换电路以及控制单元电路;
37.所述电压转换电路将接收到的直流电压转换为交流电压后,输出至所述控制单元电路;
38.所述控制单元电路接收电压转换电路输入的交流电压后,接收所述第一控制电路发送的电机控制指令,向所述底部电机电路发送电机转动命令,指示所述底部电机电路控制电机执行转动动作。
39.在第一方面的一种可选的实施方式中,所述主控电路还包括存储器电路;
40.所述存储器电路,与所述第一控制电路连接,被配置为接收所述第一控制电路发送的全景图像信号并缓存。
41.本技术实施例与现有技术相比存在的有益效果是:
42.本技术实施例中,开机之后,开始加载激光相机主控电路的后台系统,主控电路通过向镜头模组和激光测距仪发送启动信号来启动镜头模组和激光测距仪,用户通过用户终端向主控电路发送拍摄指令,主控电路根据拍摄指令控制镜头模组和激光测距仪执行拍摄动作,接收镜头模组发送的图像信号,接收激光测距仪发送的激光信号,接收光敏传感器输出的光照信号,然后主控电路的后台通过算法生成全景图像信号,向屏幕板输出全景图像信号,以指示屏幕板显示全景图像信号至用户。可见,本技术实施例可以快速启动激光相机的后台系统,结合采集到的激光信号和平面图像信号输出全景图像信号,以便后续直接根据全景图像信号生成三维模型,提高激光相机的测量精度。
附图说明
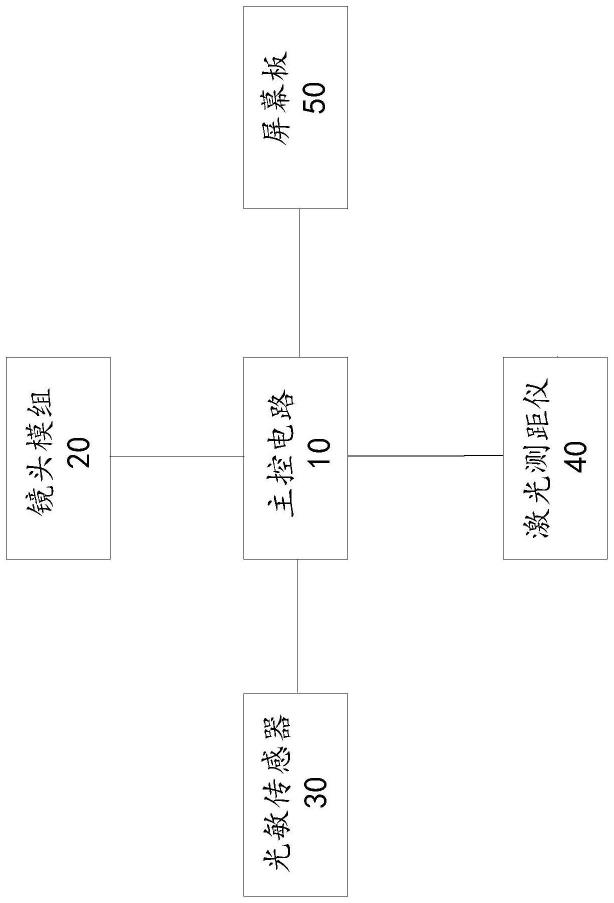
43.图1为本技术实施例提供的激光转台相机的结构示意图;
44.图2为本技术实施例提供的主控电路的结构示意图;
45.图3为本技术实施例提供的第一光敏传感器连接电路的具体结构示意图;
46.图4为本技术实施例提供的第二光敏传感器连接电路的具体结构示意图;
47.图5为本技术实施例提供的镜头模组连接电路的具体结构示意图;
48.图6为本技术实施例提供的交换机控制电路的具体电路结构示意图;
49.图7为本技术实施例提供的第一交换机连接电路的具体电路结构示意图;
50.图8为本技术实施例提供的第二交换机连接电路的具体电路结构示意图;
51.图9为本技术实施例提供的第三交换机连接电路的具体电路结构示意图;
52.图10为本技术实施例提供的第四交换机连接电路的具体电路结构示意图;
53.图11为本技术实施例提供的信号转换电路的具体结构示意图;
54.图12为本技术实施例提供的第一测距仪连接电路的具体结构示意图;
55.图13为本技术实施例提供的第二测距仪连接电路的具体结构示意图;
56.图14为本技术实施例提供的第三测距仪连接电路的具体结构示意图;
57.图15为本技术实施例提供的第一陀螺仪电路的具体结构示意图;
58.图16为本技术实施例提供的第二陀螺仪电路的具体结构示意;
59.图17为本技术实施例提供的gps电路的具体流程示意图;
60.图18为本技术实施例提供的屏幕连接电路的具体结构示意图;
61.图19为本技术实施例提供的电压转换电路的具体结构示意图;
62.图20为本技术实施例提供的控制单元电路的具体电路结构示意图;
63.图21为本技术实施例提供的底部电机电路的具体结构示意图。
具体实施方式
64.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
65.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
66.下面根据具体实施方式对本技术实施例进行介绍。
67.图1示出了本技术较佳实施例提供的激光转台相机的结构示意图,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
68.一种激光转台相机,包括主控电路10、镜头模组20、光敏传感器30、激光测距仪40以及屏幕板50。其中,主控电路,被配置为响应于开机信号,向镜头模组和激光测距仪发送启动信号;接收拍摄命令,控制镜头模组和激光测距仪执行拍摄动作,接收镜头模组发送的图像信号,接收激光测距仪发送的激光信号,接收光敏传感器输出的光照信号,向屏幕板输出图像信号;镜头模组,与主控电路连接,被配置为采集平面图像信号,向主控电路输出平面图像信号;激光测距仪,与主控电路连接,被配置为采集激光信号,向主控电路输出激光信号;光敏传感器,与主控电路连接,用于采集光照信号,向主控电路发送光照信号;屏幕板,与主控电路连接,用于接收主控电路输出的全景图像信号,显示所述全景图像信号。
69.示例性地,主控电路可以是rk3584四核fpga芯片以及外围电路组成的电路;镜头模组可以是安霸283镜头模组组成的;光敏传感器可以是环相机4方向光敏元件组成的;激光测距仪可以是livoxmid-70激光测距仪;屏幕板可以是誉翔实业y6-1440231.44寸屏幕。
70.可以理解的是,开机之后,开始加载主控电路的后台系统,主控电路通过向镜头模组和激光测距仪发送启动信号来启动镜头模组和激光测距仪,用户通过用户终端向主控电路发送拍摄指令,主控电路根据拍摄指令控制镜头模组和激光测距仪执行拍摄动作,接收镜头模组发送的图像信号,接收激光测距仪发送的激光信号,接收光敏传感器输出的光照信号,然后主控电路的后台通过算法生成全景图像信号,向屏幕板输出全景图像信号,以指示屏幕板显示全景图像信号至用户。可见,本技术可以快速启动激光相机的后台系统,结合采集到的激光信号和平面图像信号输出全景图像信号,以便后续直接根据全景图像信号生成三维模型,提高激光相机的测量精度。
71.在一种可选的实施方式中,如图2所示,为主控电路的具体结构示意图,主控电路包括电源电路100、第一控制电路101、第二控制电路102、底部电机电路103、镜头模组连接电路104、光敏传感器连接电路105、测距仪连接电路106、gps电路107、屏幕连接电路108、通信电路109以及陀螺仪电路110。其中,电源电路,被配置为分别向第一控制电路、第二控制电路、底部电机电路、镜头模组连接电路、光敏传感器连接电路、测距仪连接电路、gps电路、屏幕连接电路、通信电路以及陀螺仪电路供电;第一控制电路,被配置为接收开机信号,向模组连接电路和测距仪连接电路发送启动信号;接收通信电路发送的拍摄指令,分别向镜头模组连接电路和测距仪连接电路发送控制信号,接收镜头模组连接发送的平面图像信号,接收测距仪连接电路发送的激光信号,向屏幕连接电路输出全景图像信号;镜头模组连接电路,分别与镜头模组以及第一控制电路连接,被配置为发送启动信号至镜头模组,发送控制信号至镜头模组,接收镜头模组发送的平面图像信号并输出至第一控制电路;测距仪连接电路,分别与激光测距仪以及第一控制电路连接,被配置为发送启动信号至激光测距仪,发送控制信号至激光测距仪,接收激光测距仪发送的激光信号并输出至第一控制电路;通信电路,分别与用户终端以及所述第一控制电路连接,被配置为接收用户终端发送的拍摄指令,输出拍摄指令至所述第一控制电路;光敏传感器连接电路,分别与光敏传感器以及第一控制电路连接,被配置为接收光敏传感器发送的光照信号,输出光照信号至第一控制电路;屏幕连接电路,分别与屏幕板以及第一控制电路连接,被配置为接收第一控制电路发送的全景图像信号,输出全景图像信号至所述屏幕板;陀螺仪电路,分别与陀螺仪以及第一控制电路连接,被配置为采集陀螺仪的imu信号,输出imu信号至第一控制电路;gps电路,与第一控制电路连接,被配置为输出gps信号至第一控制电路;第二控制电路,分别与第一控制电路以及底部电机电路连接,被配置为接收第一控制电路发送的电机控制指令,向底部电机电路发送电机转动命令,指示底部电机电路控制电机执行转动动作;底部电机电路,分别与第二控制电路以及电机连接,被配置为接收第二控制电路发送的电机转动命令,控制电机执行转动动作。
72.在一种可选的实施方式中,电源电路为tps70933芯片、mp9928芯片以及mp8759芯片组成的电路。需说明的是,电源电路分别可以提供rtc3.3v、5v以及12v的直流电压。
73.在一种可选的实施方式中,第一控制电路为fpga芯片以及外围电路组成的。
74.可以理解的是,第一控制电路为主控电路的核心电路,负责对采集的信号进行处理,输出全景图像信号给屏幕板。
75.在一种可选的实施方式中,光敏传感器连接电路包括第一光敏传感器连接电路和第二光敏传感器连接电路,其中,第一光敏传感器连接电路分别与光敏传感器以及第二光敏传感器连接电路连接,第二光敏传感器连接电路分别与第一光敏传感器连接电路以及所述第一控制电路连接。
76.具体应用中,如图3所示,为本技术实施例提供的第一光敏传感器连接电路的具体结构示意图,第一光敏传感器连接电路包括j8外部继电器、电压输入端vcc_3.3v、输出端tsc_scl0、输出端tsc_sda0、输出端tsc_scl1、输出端tsc_sda1、输出端tsc_scl2、输出端tsc_sda2、输出端tsc_scl3以及输出端tsc_sda3。其中,j8外部继电器一端与光敏传感器连接,j8外部继电器另一端设有引脚1、引脚2、引脚3、引脚4、引脚5、引脚6、引脚7、引脚8、引脚9以及引脚10,j8外部继电器的引脚1与输出端tsc_scl0的一端连接,j8外部继电
器的引脚2与输出端tsc_sda0连接的一端连接,j8外部继电器的引脚3与输出端tsc_scl1的一端连接,j4外部继电器的引脚4与输出端tsc_sda1的一端连接,j4外部继电器的引脚5与输出端tsc_scl2的一端连接,j4外部继电器的引脚6与输出端tsc_sda2的一端连接,j4外部继电器的引脚7与输出端tsc_scl3的一端连接,j4外部继电器的引脚8与输出端tsc_sdas的一端连接,j4外部继电器的引脚9与电压输入端vcc_3.3v连接,j4外部继电器的引脚10接地,输出端tsc_scl0的另一端、输出端tsc_sda0的另一端、输出端tsc_scl1的另一端、输出端tsc_sda1的另一端、输出端tsc_scl2的另一端、输出端tsc_sda2的另一端、输出端tsc_scl3的另一端以及输出端tsc_sda3的另一端分别与第二光敏传感器连接电路连接。
77.具体应用中,如图4所示,为本技术实施例提供的第二光敏传感器的具体结构示意图,第二光敏传感器连接电路包括集成电路板u20、输入端tsc_scl0、输入端tsc_sda0、输入端tsc_scl1、输入端tsc_sda1、输入端tsc_scl2、输入端tsc_sda2、输入端tsc_scl3、输入端tsc_sda3、电压输入端vcc_3.3v、输出端i2c2_sda_mo以及输出端i2c3_scl_mo。其中,集成电路板的rest引脚与电压输入端vcc_3.3v连接,集成电路板u20的sd0引脚与输入端tsc_sda0的一端连接,集成电路板u20的sc0引脚与输入端tsc_scl0的一端连接,集成电路板u20的sd1引脚与输入端tsc_sda1的一端连接,集成电路板u20的sc1引脚与输入端tsc_scl1的一端连接,集成电路板u20的gnd引脚接地,集成电路板u20的sd2引脚与输入端tsc_sda2的一端连接,集成电路板u20的引脚sc3与输入端tsc_scl3的一端连接,集成电路板u20的引脚sd3与输入端tsc_sda3的一端连接,集成电路板u20的引脚sda与输出端i2c2_sda-mo的一端连接,集成电路板u20的引脚scl与输出端i2c3_scl_mo的一端连接,输出端tsc_scl0的另一端、输出端tsc_sda0的另一端、输出端tsc_scl1的另一端、输出端tsc_sda1的另一端、输出端tsc_scl2的另一端、输出端tsc_sda2的另一端、输出端tsc_scl3的另一端以及输出端tsc_sda3的另一端分别与第一传感器连接电路连接,输出端i2c2_sda_mo的另一端和输出端i2c2_sda_mo的另一端分别与第一控制电路连接。
78.在一种可选的实施方式中,如图5所示,为本技术实施例提供的镜头模组连接电路的具体结构示意图,镜头模组连接电路包括j4外部继电器、电压输入端vcc_5v、输入端h22_gpioao、输入端h22_gpiod7、输出端lan1_ap、输出端lan1_an、输出端lan1_cp、输出端lan1_cn、输出端lan1_bp、输出端lan1_bn、输出端lan1_dp以及输出端lan1_dn。其中,j4外部继电器一端与镜头模组连接,另一端设有引脚1-40,j4外部继电器的引脚2与输出端lan1_ap的一端连接,j4外部继电器的引脚3与输出端lan1_an的一端连接,j4外部继电器的引脚5与输出端lan1_cp的一端连接,j4外部继电器的引脚6与输出端lan1_cn的一端连接,j4外部继电器的引脚11与输入端h22_gpioao的一端连接,j4外部继电器的引脚12与输入端h22_gpiod7的一端连接,j4外部继电器的引脚19、引脚20、引脚39以及引脚40分别与电压输入端vcc_5v,j4外部继电器的引脚23与输出端lan1_bp的一端连接,j4外部继电器的引脚24与输出端lan1_bn的一端连接,j4外部继电器的引脚25与输出端lan1_dp的一端连接,j4外部继电器的引脚26与输出端lan1_dn的一端连接,输入端h22_gpioao的另一端、输入端h22_gpiod7的另一端、输出端lan1_ap的另一端、输出端lan1_an的另一端、输出端lan1_cp的另一端、输出端lan1_cn的另一端、输出端lan1_bp的另一端、输出
端lan1_bn的另一端、输出端lan1_dp的另一端以及输出端lan1_dn的另一端分别与第一控制电路连接。
79.可见,第一主控电路通过输入端h22_gpioao和输入端h22_gpiod7向外部继电器输入启动信号,外部继电器将启动信号输出至镜头模组,镜头模组将平面图像信号输入至j4外部继电器之后,ja外部继电器通过输出端lan1_ap、输出端lan1_an、输出端lan1_cp、输出端lan1_cn、输出端lan1_bp、输出端lan1_bn、输出端lan1_dp以及输出端lan1_dn输出平面图像信号至第一主控电路。
80.在一种可选的实施方式中,通信电路包括wifi功能电路和以太网功能电路,具体地wifi功能电路可以是rtl8811wifi模组和ap6256wifi模组组成的电路,以太网功能电路可以是rtl8811 phy芯片组成的电路。
81.在一种可选的实施方式中,测距仪连接电路包括交换机控制电路、第一交换机连接电路、第二交换机连接电路、第三交换机连接电路、第四交换机连接电路、信号转换电路、第一测距仪连接电路、第二测距仪连接电路以及第三测距仪连接电路,交换机控制电路分别与第一交换机连接电路、第二交换机连接电路、第三交换机连接电路、第四交换机连接电路连接;第四交换机与信号转换电路连接;信号转换电路与第一控制电路连接;第一交换机连接电路与第一测距仪连接电路连接,第二交换机连接电路与第二测距仪连接电路连接,第二交换机连接电路与第一测距仪连接电路连接;第一测距仪连接电路、第二测距仪连接电路以及第三测距仪连接电路分别与激光测距仪连接。
82.具体应用中,如图6所示,为本技术实施例提供的交换机控制电路的具体电路结构示意图,交换机控制电路包括集成电路板u25、输入端rd1_n、输出端rd1_p、输入端td1_n、输出端td1_p、输入端rd2_n、输出端rd2_p、输入端td2_n、输出端td2_p、输入端rd3_n、输出端rd3_p、输入端td3_n、输出端td3_p、输入端rd4_n、输出端rd4_p、输入端td4_n以及输出端td4_p,集成电路板u25设有引脚rxip1、引脚rxin1、引脚txon1、引脚txop1、引脚rxip2、引脚rxin2、引脚txon2、引脚txop2、引脚rxip3、引脚rxin3、引脚txon3、引脚txop3、引脚rxip4、引脚rxin4、引脚txon4以及引脚txop4,集成电路板u25的引脚rxip1与输出端rd1_p的一端连接,集成电路板u25的引脚rxin1与输入端td1_n的一端连接,集成电路板u25的引脚txon1与输入端td1_n的一端连接,集成电路板u25的引脚txop1与输出端td1_p的一端连接,集成电路板u25的引脚rxip2与输出端rd2_p的一端连接,集成电路板u25的引脚rxin2与输入端td2_n的一端连接,集成电路板u25的引脚txon2与输入端td2_n的一端连接,集成电路板u25的引脚txop2与输出端td2_p的一端连接,集成电路板u25的引脚rxip3与输出端rd3_p的一端连接,集成电路板u25的引脚rxin3与输入端td3_n的一端连接,集成电路板u25的引脚txon3与输入端td3_n的一端连接,集成电路板u25的引脚txop3与输出端td3_p的一端连接,集成电路板u25的引脚rxip4与输出端rd4_p的一端连接,集成电路板u25的引脚rxin4与输入端td4_n的一端连接,集成电路板u25的引脚txon4与输入端td4_n的一端连接,集成电路板u25的引脚txop4与输出端td4_p的一端连接,输入端rd1_n的另一端、输出端rd1_p的另一端、输入端td1_n的另一端、输出端td1_p的另一端分别与第一交换机连接电路连接,输入端rd2_n的另一端、输出端rd2_p的另一端、输入端td2_n的另一端、输出端td2_p的另一端分别与第二交换机连接电路连接,输入端rd3_n的另一端、输出端rd3_p的另一端、输入端td3_n的另一端、输出端td3_p的另一
端分别与第三交换机连接电路连接,输入端rd4_n的另一端、输出端rd4_p的另一端、输入端td4_n的另一端以及输出端td4_p的另一端分别与第四交换机连接电路连接。
83.示例性地,如图7所示,为本技术实施例提供的第一交换机连接电路的具体电路结构示意图,第一交换机连接电路包括集成电路板xer1、输入端td1_n、输出端td1_p、输入端rd1_n、输出端rd1_p、输入端tx1_n、输出端tx1_p、输入端rx1_n以及输出端rx1_p。其中,集成电路板xer1设有引脚1-16,集成电路板xer1的引脚1与输入端td1_p的一端连接,集成电路板xer1的引脚3与输入端td1_n的一端连接,集成电路板xer1的引脚6与输出端rd1_p的一端连接,集成电路板xer1的引脚8与输入端rd1_n的一端连接,集成电路板xer1的引脚16与输出端tx1_p的一端连接,集成电路板xer1的引脚14与输入端tx1_n的一端连接,集成电路板xer1的引脚11与输出端rx1_p的一端连接,集成电路板xer1的引脚9与输入端rx1_n的一端连接,输入端rd1_n的另一端、输出端rd1_p的另一端、输入端td1_n的另一端以及输出端td1_p的另一端分别与交换机控制电路连接,输入端tx1_n的另一端、输出端tx1_p的另一端、输入端rx1_n的另一端以及输出端rx1_p的另一端分别与第一测距仪连接电路连接。
84.示例性地,如图8所示,为本技术实施例提供的第二交换机连接电路的具体电路结构示意图,第二交换机连接电路包括集成电路板xer2、输入端td2_n、输出端td2_p、输入端rd2_n、输出端rd2_p、输入端tx2_n、输出端tx2_p、输入端rx2_n以及输出端rx2_p。其中,集成电路板xer2设有引脚1-16,集成电路板xer2的引脚1与输入端td2_p的一端连接,集成电路板xer2的引脚3与输入端td2_n的一端连接,集成电路板xer2的引脚6与输出端rd2_p的一端连接,集成电路板xer2的引脚8与输入端rd2_n的一端连接,集成电路板xer2的引脚16与输出端tx2_p的一端连接,集成电路板xer2的引脚14与输入端tx2_n的一端连接,集成电路板xer2的引脚11与输出端rx2_p的一端连接,集成电路板xer2的引脚9与输入端rx2_n的一端连接,输入端rd2_n的另一端、输出端rd2_p的另一端、输入端td2_n的另一端以及输出端td2_p的另一端分别与交换机控制电路连接,输入端tx2_n的另一端、输出端tx2_p的另一端、输入端rx2_n的另一端以及输出端rx2_p的另一端分别与第一测距仪连接电路连接。
85.示例性地,如图9所示,为本技术实施例提供的第三交换机连接电路的具体电路结构示意图,第三交换机连接电路包括集成电路板xer3、输入端td3_n、输出端td3_p、输入端rd3_n、输出端rd3_p、输入端tx3_n、输出端tx3_p、输入端rx3_n以及输出端rx3_p。其中,集成电路板xer3设有引脚1-16,集成电路板xer3的引脚16与输出端td3_p的一端连接,集成电路板xer3的引脚14与输入端td3_n的一端连接,集成电路板xer3的引脚11与输出端rd3_p的一端连接,集成电路板xer3的引脚9与输入端rd3_n连接,集成电路板xer3的引脚1与输出端tx3_p连接,集成电路板xer3的引脚3与输入端tx3_n连接,集成电路板xer3的引脚6与输出端rx3_p连接,集成电路板xer3的引脚8与输入端rx3_n连接,输入端td3_n的另一端、输出端td3_p的另一端、输入端rd3_n的另一端以及输出端rd3_p的另一端分别与交换机控制电路连接,输入端tx3_n的另一端、输出端tx3_p的另一端、输入端rx3_n的另一端以及输出端rx3_p的另一端分别与第二测距仪连接电路连接。
86.示例性地,如图10所示,为本技术实施例提供的第四交换机连接电路的具体电路结构示意图,第一交换机连接电路包括集成电路板xer4、输入端td4_n、输出端td4_p、输
入端rd4_n、输出端rd4_p、输入端tx4_n、输出端tx4_p、输入端rx4_n以及输出端rx4_p。其中,集成电路板xer4设有引脚1-16,集成电路板xer4的引脚1与输入端td4_p的一端连接,集成电路板xer4的引脚3与输入端td4_n的一端连接,集成电路板xer4的引脚6与输出端rd4_p的一端连接,集成电路板xer4的引脚8与输入端rd4_n的一端连接,集成电路板xer4的引脚16与输出端tx4_p的一端连接,集成电路板xer4的引脚14与输入端tx4_n的一端连接,集成电路板xer4的引脚11与输出端rx4_p的一端连接,集成电路板xer4的引脚9与输入端rx4_n的一端连接,输入端rd4_n的另一端、输出端rd4_p的另一端、输入端td4_n的另一端以及输出端td4_p的另一端分别与交换机控制电路连接,输入端tx4_n的另一端、输出端tx4_p的另一端、输入端rx4_n的另一端以及输出端rx4_p的另一端分别与信号转换电路连接。
87.示例性地,如图11所示,为本技术实施例提供的信号转换电路的具体结构示意图,信号转换电路包括集成电路板ax88772a、输入端tx4_n、输出端tx4_p、输入端rx4_n、输出端rx4_p、输入端usb_xin12m以及输出端usb_xout12m。其中,集成电路板ax88772a设有引脚rxin、引脚rxip、引脚txon、引脚txop、引脚xtl12p以及引脚xtl12n,集成电路板ax88772a的引脚rxin与输入端rx4_n的一端连接,电路板ax88772a的引脚rxip与rx4_p的一端连接,电路板ax88772a的引脚txon与输入端tx4_n的一端连接,电路板ax88772a的引脚txop与输出端rx4_p连接,电路板ax88772a的引脚xtl12p与输入端usb_xin12m的一端连接,电路板ax88772a的引脚xtl12n与输出端usb_xout12m连接,输入端tx4_n的另一端、输出端tx4_p的另一端、输入端rx4_n的另一端以及输出端rx4_p的另一端分别与第四交换机连接电路连接,输入端usb_xin12m的另一端以及输出端usb_xout12m的另一端分别与第一控制电路连接。
88.示例性地,如图12所示,为本技术实施例提供的第一测距仪连接电路的具体结构示意图,第一测距仪连接电路包括外部继电器j25、输入端tx1_n、输出端tx1_p、输入端rx1_n以及输出端rx1_p。其中,外部继电器j25的一端与激光测距仪连接,外部继电器j25的另一端设有引脚12、引脚13、引脚15以及引脚16,外部继电器j25的引脚12与输出端tx1_p的一端连接,外部继电器j25的引脚13与输入端tx1_n的一端连接,外部继电器j25的引脚15与rx1_p连接,外部继电器j25的引脚16与输出端rx1_n连接,输入端tx1_n的另一端、输出端tx1_p的另一端、输入端rx1_n的另一端以及输出端rx1_p的另一端分别与第一交换机连接电路连接。
89.示例性地,如图13所示,为本技术实施例提供的第二测距仪连接电路的具体结构示意图,第二测距仪连接电路包括外部继电器j24、输入端tx2_n、输出端tx2_p、输入端rx2_n以及输出端rx2_p。其中,外部继电器j24的一端与激光测距仪连接,外部继电器j24的另一端设有引脚12、引脚13、引脚15以及引脚16,外部继电器j24的引脚12与输出端tx2_p的一端连接,外部继电器j24的引脚13与输入端tx2_n的一端连接,外部继电器j24的引脚15与rx2_p连接,外部继电器j24的引脚16与输出端rx2_n连接,输入端tx2_n的另一端、输出端tx2_p的另一端、输入端rx2_n的另一端以及输出端rx2_p的另一端分别与第二交换机连接电路连接。
90.示例性地,如图14所示,为本技术实施例提供的第三测距仪连接电路的具体结构示意图,第一测距仪连接电路包括外部继电器j23、输入端tx3_n、输出端tx3_p、输入端
rx3_n以及输出端rx3_p。其中,外部继电器j23的一端与激光测距仪连接,外观继电器j23的另一端设有引脚12、引脚13、引脚15以及引脚16,外部继电器j23的引脚12与输出端tx3_p的一端连接,外部继电器j23的引脚13与输入端tx3_n的一端连接,外部继电器j23的引脚15与rx3_p连接,外部继电器j23的引脚16与输出端rx3_n连接,输入端tx3_n的另一端、输出端tx3_p的另一端、输入端rx3_n的另一端以及输出端rx3_p的另一端分别与第三交换机连接电路连接。
91.可以理解的是,本技术实施例,第一控制电路通过第四交换机连接电路以及交换机控制电路,与激光测距仪通过交换机控制电路、第一交换机连接电路、第二交换机连接电路、第三交换机连接电路、第一测距仪连接电路、第二测距仪连接电路以及第三测距仪连接电路,使得第一控制电路与激光测距仪之间进行usb信号与以太网信号之间的交换,从而实现主控电路控制激光测距仪采集激光信号。
92.在一种可选的实施方式中,陀螺仪电路包括第一陀螺仪电路和第二陀螺仪电路,第一陀螺仪电路分别与陀螺仪以及第二陀螺仪电路连接,第二陀螺仪电路分别与第一陀螺仪以及第一控制电路连接。
93.具体地,如图15所示,为本技术实施例提供的第一陀螺仪电路的具体结构示意图,第一陀螺仪电路包括集成电路板u21、输入端icm20948_sync、输入端icm20948_tnt、输出端imu_sdo、输出端imu_sdi、输出端imu_sclk以及输出端imu_ncs。其中,集成电路板u21设有引脚int1、引脚fsync、引脚sdo、引脚sdi、引脚sclk以及引脚ncs,集成电路板u21的引脚int1与输入端icm20948_tnt的一端连接,集成电路板u21的引脚fsync与输入端icm20948_sync连接,集成电路板u21的引脚sdo与输出端imu_sdo的一端连接,集成电路板u21的引脚sdi与输出端imu_sdi连接,集成电路板u21的引脚sclk与输出端imu_sclk连接,集成电路板u21的ncs与输出端imu_ncs连接,输入端icm20948_sync的另一端与陀螺仪连接和输入端icm20948_tnt的另一端与陀螺仪连接,输出端imu_sdo的另一端、输出端imu_sdi的另一端、输出端imu_sclk的另一端以及输出端imu_ncs的另一端分别与第二陀螺仪电路连接。
94.示例性地,如图16所示,为本技术实施例提供的第二陀螺仪电路的具体结构示意图,第二陀螺仪电路包括集成电路板u21、输入端imu_sdo、输入端imu_sdi、输入端imu_sclk、输入端imu_ncs、输出端imuspiomiso、输出端imuspiomisi、输出端imuspiocs以及输出端imuspioclk。其中,集成电路板u21设有引脚a1、引脚a2、引脚a3、引脚a4、引脚b1、引脚b2、引脚b3以及引脚b4,集成电路板u21的引脚a1与输入端imu_sdo的一端连接,集成电路板u21的引脚a2与输入端imu_sdi的一端连接,集成电路板u21的引脚a3与输入端imu_sclk的一端连接,集成电路板u21的引脚a4与输入端imu_ncs的一端连接,集成电路板u21的引脚b1与输出端imuspiomiso的一端连接,集成电路板u21的引脚b2与输出端imuspiomisi的一端连接,集成电路板u21的引脚b3与输出端imuspiocs的一端连接,集成电路板u21的引脚b4与输出端imuspioclk的一端连接,输入端imu_sdo的另一端、输入端imu_sdi的另一端、输入端imu_sclk的另一端以及输入端imu_ncs的另一端分别与第一陀螺仪电路连接,输出端imuspiomiso、输出端imuspiomisi、输出端imuspiocs以及输出端imuspioclk分别与第一控制电路连接。
95.可以理解的是,陀螺仪通过第一陀螺仪电路的输出端imu_sclk和输出端imu_
ncs输入imu信号,第一控制电路通过第二陀螺仪电路的输出端imuspiomiso、输出端imuspiomisi、输出端imuspiocs以及输出端imuspioclk接收imu信号,从而实现陀螺仪传输采集到的imu信号至主控电路。
96.在一种可选的实施方式中,如图17所示,为本技术实施例提供的gps电路的具体流程示意图,gps电路包括外部继电器j27、集成电路板u43、输出端uart5_rx以及输出端uart5_tx。其中,外部继电器j27一端连接外部的gps系统,另一端设有引脚1、引脚2以及引脚3,引脚2和引脚3分别接地,引脚1与集成电路板u43的引脚rf连接,集成电路板u43的引脚txd与输出端uart5_rx的一端连接,集成电路板u43的引脚rxd与输出端uart5_tx的一端连接,输出端uart5_rx的另一端以及输出端uart5_tx的另一端分别与第一控制电路连接。
97.可以理解的是,gps电路可以实现将外部gps系统的gps信息传输至第一控制电路。
98.在一种可选的实施方式中,如图18所示,为本技术实施例提供的屏幕连接电路的具体结构示意图,屏幕连接电路包括外部继电器j19、输入端mspi2clk、输入端mspi2mosi、输入端mspi2cs1、输入端gpio3_a1以及led灯。其中,外部继电器j19一端与屏幕板连接,另一端设有引脚a0、引脚sda、引脚scl、引脚cs以及引脚led,外部继电器j19的引脚a0与输入端gpio3_a1连接的一端连接,外部继电器j19的引脚sda与输入端mspi2mosi的一端连接,外部继电器j19的引脚scl与输入端mspi2clk的一端连接,外部继电器j19的引脚cs与输入端mspi2cs1的一端连接,外部继电器j19的led引脚与led灯连接,输入端mspi2clk、输入端mspi2mosi、输入端mspi2cs1、输入端gpio3_a1分别与第一控制电路连接。
99.可以理解的是,第一控制电路通过屏幕连接电路将全景图像信号输出至屏幕板。
100.在一种可选的实施方式中,第二控制电路包括电压转换电路以及控制单元电路;电压转换电路将接收到的直流电压转换为交流电压后,输出至控制单元电路;控制单元电路接收电压转换电路输入的交流电压后,接收第一控制电路发送的电机控制指令,向底部电机电路发送电机转动命令,指示底部电机电路控制电机执行转动动作。
101.具体应用中,如图19所示,为本技术实施例提供的电压转换电路的具体结构示意图,电压转换电路包括集成电路板u19、输入端stm32rst、电压输入端vcc_3.3v以及电压输出端muc3.3v,其中,输入端stm32rst的一端与主控电路连接,输入端stm32rst的另一端与电路板u19的引脚vbat连接,电压输入端vcc_3.3v与电路板u19的引脚vbrf+连接,电压输出端muc3.3v的一端与电路板u19的引脚vbat,电压输出端muc3.3v的另一端与控制单元电路连接。
102.可以理解的是,第一控制电路通过输入端stm32rst向电压转换电路输入高电平导通电压转换电路,使得电压转换电路将电压输入端vcc_3.3v输入的直流电压转换为交流电压后,通过电压输出端muc3.3v输出至控制单元电路。
103.示例性地,如图20所示,为本技术实施例提供的控制单元电路的具体电路结构示意图,控制单元电路包括集成电路板u38a、电压输入端mcu3.3v、输入端uart7_rx、输入端uart7_tx、输入端motor_fin、输入端m_en、输入端mspi2cs0、输出端m_spincs、输出端m_spisck、输出端m_spimiso、输出端m_spimosi、输出端mp1、输出端step、输出端dir以及输出端mp2。其中,集成电路板u38a设有引脚pf2-nrst、引脚pa4、引脚pa5、引脚pa6、引脚p7、引脚pb4、引脚pb5、引脚pb7、引脚pb9、引脚pb10、引脚pa15、引脚pb4、引脚pb5、引脚pb7、
引脚pb9、引脚pb10以及引脚pb12,集成电路板u38a的引脚pf2-nrst与电压输入端mcu3.3v连接,集成电路板u38a的引脚pa4与输出端m_spincs的一端连接,集成电路板u38a的引脚pa5与输出端m_spisck的一端连接,集成电路板u38a的引脚pa6与输出端m_spimiso的一端连接,集成电路板u38a的引脚pa7与输出端m_spimosi的一端,集成电路板u38a的引脚pa9与输入端uart7_rx的一端连接,集成电路板u38a的引脚pa10与输入端uart7_tx的一端连接,集成电路板u38a的引脚pa15与输出端mp1的一端连接,集成电路板u38a的引脚pb4与输出端step的一端连接,集成电路板u38a的引脚pb5与输出端dir的一端连接,集成电路板u38a的引脚pb7与输出端mp2的一端连接,集成电路板u38a的引脚pb7与输出端mp2的一端连接,集成电路板u38a的引脚pb9与输入端motor_fin的一端连接,集成电路板u38a的引脚pb10与输入端m_en的一端连接,输入端uart7_rx的另一端、输入端uart7_tx的另一端、输入端motor_fin的另一端、输入端m_en的另一端、输入端mspi2cs0的另一端、输出端m_spincs的另一端分别与第一控制电路连接,输出端m_spincs的另一端、输出端m_spisck的另一端、输出端m_spimiso的另一端、输出端m_spimosi的另一端、输出端mp1的另一端、输出端step的另一端、输出端dir的另一端以及输出端mp2的另一端分别与底部电机电路连接。
104.示例性地,如图21所示,为本技术实施例提供的底部电机电路的具体结构示意图,底部电机电路包括集成电路板tmc1、输入端m_spincs、输入端m_spisck、输入端m_spimiso、输入端m_spimosi、输入端mp1、输入端step、输入端dir、输入端mp2、电机m1a、电机m1a2、电机m1b1以及电机m1b2。其中,集成电路板tmc1设有引脚csn_cfg3、引脚sck_cfg2、引脚sdi_nai_cfg1、引脚sdo_nao_cfgo、引脚encn_dco、引脚encb_dcen_cfg4、引脚refl_step、引脚refr_dir、引脚oa1、引脚oa2、引脚ob1以及引脚ob2,集成电路板tmc1的引脚oa1与电机ma1连接,集成电路板tmc1的引脚oa2与电机m1a2连接,集成电路板tmc1的引脚ob1与电机m1b1连接,集成电路板tmc1的引脚ob2与电机m1b2连接,集成电路板tmc1的引脚csn_cfg3与输入端m_spincs的一端连接,集成电路板tmc1的引脚sck_cfg2与输入端m_spisck的一端连接,集成电路板tmc1的引脚sdi_nai_cfg1与输入端m_spimiso的一端连接,集成电路板tmc1的引脚sdo_nao_cfgo与输入端m_spimiso的一端连接,集成电路板tmc1的引脚encn_dco与输入端mp1的一端连接,集成电路板tmc1的引脚encb_dcen_cfg4与输入端mp2的一端连接,集成电路板tmc1的引脚refl_step与输入端step的一端连接,集成电路板tmc1的引脚refr_dir与输入端dir的一端连接,输入端m_spincs的另一端、输入端m_spisck的另一端、输入端m_spimiso的另一端、输入端m_spimosi的另一端、输入端mp1的另一端、输入端step的另一端、输入端dir的另一端、输入端mp2的另一端分别与控制单元电路连接。
105.可以理解的是,控制单元电路通过底部电机电路达到控制电机的目的。
106.在一种可选的实施方式中,存储器电路优选为ddr4存储器电路和/或flash存储器电路。
107.本技术实施例中,开机之后,开始加载主控电路的后台系统,主控电路通过向镜头模组和激光测距仪发送启动信号来启动镜头模组和激光测距仪,用户通过用户终端向主控电路发送拍摄指令,主控电路根据拍摄指令控制镜头模组和激光测距仪执行拍摄动作,接收镜头模组发送的图像信号,接收激光测距仪发送的激光信号,接收光敏传感器输出的光
照信号,然后主控电路的后台通过算法生成全景图像信号,向屏幕板输出全景图像信号,以指示屏幕板显示全景图像信号至用户。可见,本技术实施例可以快速启动激光相机的后台系统,结合采集到的激光信号和平面图像信号输出全景图像信号,以便后续直接根据全景图像信号生成三维模型,提高激光相机的测量精度。
108.所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。实施例中的各功能单元、模块可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中,上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。另外,各功能单元、模块的具体名称也只是为了便于相互区分,并不用于限制本技术的保护范围。上述系统中单元、模块的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
109.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
110.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1