物品把持系统的制作方法
1.本发明涉及物品把持系统。
背景技术:
2.作为称重后分配的装置,例如,在专利文献1(特开平6-3182号公报)中公开了如下装置:具有多个采集单元,所述多个采集单元分别具备:把持单元,将物品的一部分把持并移除;以及称重单元,记录物品的一部分重量。
3.该装置还具备分配单元和为了规定的合计重量而预先编好程序的计算机,通过称重单元对由把持单元把持的物品的重量进行计测,将该物品投入规定场所。
技术实现要素:
4.发明要解决的技术问题
5.但是,在上述装置中,分别需要把持物品的区域和投入物品的区域,装置的设置面积变大,而且从把持物品到投入物品的时间变长。
6.本发明的问题在于提供一种物品把持系统,其减少装置的设置面积,进一步缩短从把持物品到投入物品的时间。
7.用于解决问题的技术方案
8.第一观点的物品把持系统是从容器中容纳的物品组将物品把持并排出的物品把持系统,并且具备多个把持单元、驱动部以及控制部。把持单元把持物品。驱动部使把持单元和容器中的至少一方相对于另一方相对移动。控制部控制驱动部,使把持单元和容器中的至少一方移动。而且,控制部对容器和特定的把持单元的位置关系中的第一位置关系和第二位置关系进行切换。第一位置关系是容器妨碍特定的把持单元所把持的物品的排出的位置关系。第二位置关系是容器不妨碍特定的把持单元所把持的物品的排出的位置关系。
9.在该物品把持系统中,例如,也能使容器向把持单元的把持位置移动,在这种情况下,把持单元不在保持持有物品的状态下移动,能防止物品从把持单元落下。
10.第二观点的物品把持系统在第一观点的物品把持系统中,驱动部包括第一水平移动机构。第一水平移动机构使把持单元和容器中的至少一方相对于另一方在第一水平方向上相对移动。
11.在该物品把持系统中,在水平方向上配置有多个把持单元的情况下,通过第一水平移动机构,能使容器内的物品组的位置与按每一把持单元设定的物品把持位置一致。
12.第三观点的物品把持系统在第二观点的物品把持系统中,驱动部还包括第二水平移动机构。第二水平移动机构使把持单元和容器中的至少一方相对于另一方向与第一水平方向不同的第二水平方向相对移动。
13.在该物品把持系统中,在水平方向上配置有多个把持单元的情况下,通过第二水平移动机构,能使容器内的物品组的位置与按每一把持单元设定的物品把持位置一致。
14.第四观点的物品把持系统在第一观点到第三观点中的任意一个物品把持系统中,
驱动部还包括铅垂移动机构。铅垂移动机构使把持单元和容器中的至少一方相对于另一方在铅垂方向上相对移动。
15.该物品把持系统在相对于各把持单元在铅垂方向上分开配置有容器的情况下,通过铅垂移动机构,能使容器内的物品组的位置与按每一把持单元设定的物品把持位置一致。
16.第五观点的物品把持系统在第四观点的物品把持系统中,控制部经由铅垂移动机构使容器上升或者下降。而且,控制部在使容器上升时,在容器结束上升前,将第一水平移动机构和第二水平移动机构的动作结束。
17.在该物品把持系统中,在使容器上升时,在容器结束上升前将第一水平移动机构和第二水平移动机构的动作结束,从而避免使容器内的物品组向前后或左右任意的方向偏移。
18.第六观点的物品把持系统在第一观点到第五观点中的任意一个物品把持系统中,把持单元具有多个爪。多个爪至少切换为第一状态和第二状态中的任意的状态。第一状态是将爪彼此的相对距离缩短到第一距离来把持物品的状态。第二状态是将爪彼此的相对距离扩大到比第一距离大的第二距离来解除物品的把持的状态。
19.第七观点的物品把持系统在第六观点的物品把持系统中,控制部经由铅垂移动机构使容器上升或者下降。而且,控制部在使容器上升时,在容器结束上升前将多个爪切换为第二状态。
20.在该物品把持系统中,在使容器上升时,在容器结束上升前将爪切换为第二状态(爪已打开的状态),从而避免使容器内的物品向前后或左右任意的方向偏移。
21.第八观点的物品把持系统在第七观点的物品把持系统中,控制部在使容器上升后将多个爪切换为第一状态。
22.在该物品把持系统中,爪在进入到容器内的物品组之中的状态下被切换为第一状态(爪已关闭的状态),因此能可靠地保持物品。
23.第九观点的物品把持系统在第三观点到第八观点中的任意一个物品把持系统中,第二水平移动机构使把持单元向与第一水平方向不同的第二水平方向移动。
24.在该物品把持系统中,在使把持单元上下移动的类型的情况下,需要在抓取并结束上升后进行计量。相对于此,在是容器向上下/左右移动且把持单元向前后移动的类型的情况下,把持单元能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
25.第十观点的物品把持系统在第四观点到第九观点中的任意一个物品把持系统中,第一水平移动机构使容器和铅垂移动机构在第一水平方向上移动。
26.在该物品把持系统中,铅垂移动机构无需使第一水平移动机构升降,只要仅使容器升降即可,因此使容器升降时的负荷得到减轻。
27.第十一观点的物品把持系统在第十观点的物品把持系统中,还具备排出斜槽。排出斜槽具有位于容器的下方的入口,在该入口处接受把持单元的把持被解除而落下的物品,将其排出到规定场所。第一水平移动机构在比排出斜槽的入口靠下方处动作。
28.该物品把持系统通过避免在比排出斜槽的入口靠上方的空间配置滑动物(第一水平移动机构),来防止向排出斜槽的异物混入。
29.第十二观点的物品把持系统在第十一观点的物品把持系统中,铅垂移动机构在比
排出斜槽的入口靠下方处,使容器的铅垂方向的移动完结。
30.在该物品把持系统中,通过避免在比排出斜槽的入口靠上方的空间配置滑动物(例如,铅垂移动机构),来防止向排出斜槽的异物混入。
31.第十三观点的物品把持系统在第一观点到第十二观点中的任意一个物品把持系统中,多个把持单元至少包括第一把持单元和第二把持单元。控制部使容器内的物品组向第一把持单元把持物品的第一把持位置移动。而且,控制部在使第一把持单元把持物品后,使容器内的物品组向第二把持单元把持物品的第二把持位置移动。
32.第十四观点的物品把持系统在第十三观点的物品把持系统中,控制部在使容器内的物品组向第二把持位置移动后,使第一把持单元解除物品的把持,使第二把持单元从容器内的物品组把持物品。
33.第十五观点的物品把持系统在第十四观点的物品把持系统中,控制部使让第一把持单元解除物品的把持的动作与让第二把持单元把持物品的动作联动。
34.发明效果
35.在该物品把持系统中,例如能使容器向把持单元的把持位置移动,在这种情况下,把持单元不在保持持有物品的状态下移动,能防止物品从把持单元落下。
附图说明
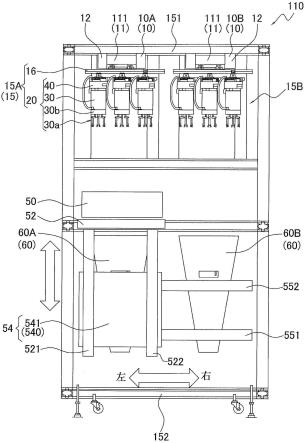
36.图1a是本发明的一实施方式的物品把持系统的主视图。
37.图1b是从右侧方观察图1a的物品把持系统时的侧视图。
38.图1c是从正上方观察图1a的物品把持系统时的俯视图。
39.图1d是从正下方观察图1a的物品把持系统时的仰视图。
40.图2是物品把持系统的框图。
41.图3是把持单元的概要立体图。
42.图4a是从下方观察把持器的把持部件时的仰视图。
43.图4b是从下方观察把持器的把持部件时的仰视图。
44.图4c是从下方观察把持器的把持部件时的仰视图。
45.图5a是图1a的物品把持系统的容器向右方水平移动时的该物品把持系统的主视图。
46.图5b是从正下方观察图5a的物品把持系统时的仰视图。
47.图6是从右侧方观察图5a的物品把持系统的容器向上方铅垂移动时的该物品把持系统时的侧视图。
48.图7是物品把持系统的动作的定时图。
49.图8a是物品把持系统的动作流程图。
50.图8b是物品把持系统的动作流程图。
51.图8c是物品把持系统的动作流程图。
52.图8d是物品把持系统的动作流程图。
53.图8e是物品把持系统的动作流程图。
54.图9是示出前后移动机构的一个例子的俯视图。
55.图10a是示出容纳左右移动机构的容器驱动部的一个例子的主视图。
56.图10b是示出容纳铅垂移动机构的容器驱动部的一个例子的主视图。
具体实施方式
57.参照附图对本发明的实施方式进行说明。以下说明的实施方式是本发明的具体例之一,并不限定本发明的技术范围。
58.(1)物品把持系统110的构成
59.图1a是本发明的一实施方式所涉及的物品把持系统110的主视图,图1b是从右侧方观察图1a的物品把持系统110时的侧视图。另外,图1c是从正上方观察图1a的物品把持系统110时的俯视图,图1d是从正下方观察图1a的物品把持系统110时的仰视图。
60.在图1a、图1b以及图2中,物品把持系统110是从作为物品a的集合的物品组a1将一部分物品a取出并排出的装置。
61.具体地说,物品把持系统110从物品组a1将一部分物品a取出并排出,以使重量成为目标重量范围。物品把持系统110排出的物品a例如在物品把持系统110的后工序中被包装到袋中,或者被收容到容器中,或者作为商品被出厂。
62.物品把持系统110具备单元驱动部10、把持单元15、容器50、容器驱动部54、排出斜槽60以及控制部70。
63.在单元驱动部10安装有把持单元15。把持单元15具有1个以上的把持模块20。把持模块20一体地组装有把持物品a的把持器30和计量物品a的重量值的计量器40。各把持器30具有作为把持物品a的把持部件的把持爪30a。另外,在把持器30组装有驱动把持爪30a的把持部件驱动机构30b。计量器40计量把持器30所把持的物品a的重量值。
64.在容器50收容有物品组a1。物品a例如是包含大量意大利面等面类、糖类的食品等粘着性高的食品。
65.容器50通过容器驱动部54在把持器30把持载置于容器50的物品组a1的物品a的第一位置、与把持器30不从载置于容器50的物品组a1把持物品a的第二位置之间移动。排出斜槽60接受把持器30解除了把持的物品a并将其排出。
66.图2是物品把持系统110的框图。在图2中,控制部70进行包括容器驱动部54以及把持部件驱动机构30b的物品把持系统110的各种构成的动作的控制、利用计量器40计量出的物品a的重量值的组合计算等。
67.控制部70使单元驱动部10和容器50移动,使把持器30与物品组a1所载置的容器50接近。控制部70控制各把持器30的把持部件驱动机构30b,使各把持器30的把持爪30a把持载置于容器50的物品组a1的物品a的一部分。
68.各计量器40计量与该计量器40对应的把持器30所把持的物品a的重量值。控制部70基于各计量器40计量出的把持器30所把持的物品a的重量值来进行组合计算。
69.组合计算是寻找作为将把持器30各自把持的物品a的重量值相加后的结果其合计值达到目标重量范围的重量值的组合的处理。控制部70基于组合计算的结果,使与达到目标重量范围的重量值的组合对应的把持器30的把持爪30a在排出斜槽60的上方解除物品a的把持,并从排出斜槽60排出目标重量范围的物品a。
70.(2)详细构成
71.图3是把持单元15的概要立体图。图4a和图4b是从下方观察把持器30的把持爪30a
时的仰视图。以下,使用图1a、图1b、图3、图4a以及图4b对单元驱动部10和把持单元15进行说明。
72.(2-1)单元驱动部10
73.如图1a所示,物品把持系统110具备2个单元驱动部10。将图1a的主视左侧的单元驱动部10设为第一单元驱动部10a,将图1a的主视右侧的单元驱动部10设为第二单元驱动部10b。不过,在说明共用的构成和功能时,仅称为单元驱动部10。
74.单元驱动部10具有2个平行延伸的框架12和使把持单元15沿着框架12水平移动的前后移动机构11。如图1b所示,单元驱动部10能通过前后移动机构11使保持把持单元15的块111向箭头d1(前方)或者箭头d2(后方)的方向移动。单元驱动部10具有使块111移动的伺服电机113(参照图9)。
75.这样,在物品把持系统110中,在水平方向上配置有第一把持单元15a和第二把持单元15b,第一把持单元15a能通过第一单元驱动部10a、第二把持单元15b能通过第二单元驱动部10b在前后方向上水平移动,能使容器50内的物品组的位置与按每一把持单元15设定的物品把持位置一致。
76.另外,也可以代替伺服电机而具有能使块111向箭头d1或者箭头d2的方向移动的气缸。
77.(2-2)把持单元15
78.如图1a所示,物品把持系统110具备2个把持单元15。将图1a的主视左侧的把持单元15设为第一把持单元15a,将图1a的主视右侧的把持单元15设为第二把持单元15b。不过,在对共用的构成和功能进行说明时,简称为把持单元15。
79.把持单元15包括:与单元驱动部10的块111连结的板状的连结部件16;以及1个以上的把持模块20。
80.(2-2-1)连结部件16
81.连结部件16例如通过螺丝固定被与单元驱动部10的块111连结。
82.(2-2-2)把持模块20
83.如图3所示,把持模块20是一体地组装有把持器30和计量器40而成的设备。计量器40的顶面经由安装金属件400固定到连结部件16,在计量器40的底面固定有把持器30。
84.(2-2-2-1)把持器30
85.把持器30是把持物品a的装置。各把持器30具有把持爪30a和作为驱动把持爪30a的驱动机构的把持部件驱动机构30b。把持部件驱动机构30b例如以电机或流体压力为驱动源来驱动把持爪30a。
86.在本实施方式中,如图3所示,把持爪30a在棒状或手指状的部件的前端形成有以能钩挂物品a的方式向内侧弯曲的爪。各把持器30具有多个(例如3个)把持爪30a。需要说明的是,图3等中描绘的把持爪30a的数量或形状不过是示例,能够适当变更。
87.如图4a和图4b所示,在从把持爪30a侧观察各把持器30时,在周向上排列配置有多个把持爪30a。另外,在从各把持器30的把持爪30a侧观察时,在周向上大体按相等间隔排列配置有多个把持爪30a。而且,在从把持爪30a侧观察各把持器30时,把持爪30a能在径向上移动。
88.另外,把持器30通过将处于相互分开的状态的把持爪30a设为通过把持部件驱动
机构30b沿径向向内移动并相互接近的状态,从而在多个把持爪30a之间夹住物品a并把持物品a。
89.而且,把持器30通过将处于相互接近的状态的把持爪30a设为通过把持部件驱动机构30b沿径向向外移动并相互分开的状态,从而解除物品a的把持。
90.换言之,把持单元15的多个把持爪30a至少切换为第一状态和第二状态中的任意的状态。第一状态是将把持爪30a彼此的相对距离缩短到第一距离来把持物品的状态。第二状态是将把持爪30a彼此的相对距离扩大到比第一距离大的第二距离来解除物品的把持的状态。
91.不过,在为了物品a不被把持爪30a破坏或者由于过负荷保护的目的而设置有把持力限制功能的情况下,在将把持爪30a彼此的相对距离缩短到第一距离前因来自物品a的外力而停止。因此,第一状态不一定必须是将把持爪30a彼此的相对距离缩短到第一距离的状态,第一状态也可以是缩短到能把持物品a的距离的状态。
92.(2-2-2-2)计量器40
93.在把持模块20中,针对各把持器30设置有1个计量器40。计量器40计量对应的把持器30的把持爪30a正在把持的物品a的重量值。
94.各计量器40包括传感器部40a(参照图3)和未图示的内部控制部。传感器部40a包括力传感器和加速度传感器。作为力传感器,例如可采用应变仪式测力传感器。加速度传感器例如可采用应变仪式测力传感器、mems型小型加速度传感器。
95.计量器40的内部控制部在把持着物品a的状态的把持器30随着单元驱动部10的移动而移动时,基于用传感器部40a计测的力和加速度,来测定把持器30正在把持的物品a的质量。具体地说,计量器40的内部控制部通过用由加速度传感器计测出的加速度除用力传感器计测出的力来测定把持器30正在把持的物品a的质量。
96.不过,计量器40不限于基于在把持器30移动时被计测的力和加速度来计量物品a的质量的方式。计量器40也可以使用测力传感器等来计量静止状态的把持器30正在把持的物品a的重量。
97.(2-3)容器50
98.在容器50中收容有物品组a1。容器50是在进行水平移动和铅垂移动的载置面52载置有容器50。
99.把持器30从容器50中收容的物品组a1把持物品a的一部分。在本实施方式中,容器50是上方打开的长方体状的容器。容器50构成为当内部所收容的物品a的量减少时,人或者机械能将内部的物品a的量已减少的容器50与新的(较多地收容有物品a的)容器50进行更换。
100.需要说明的是,容器50也可以代替容器构成为能更换而具有用于对容器50供给物品a的物品供给机构。
101.容器50通过容器驱动部54在第一位置与第二位置之间移动。
102.第一位置是第一把持单元15a的把持器30的正下方的位置,并且是第一把持单元15a的把持器30能把持容器50内的物品a的位置。在容器50位于第一位置时,第二把持单元15b的把持器30无法把持容器50内的物品a。
103.另一方面,容器50的第二位置是第二把持单元15b的把持器30的正下方的位置,并
且是第二把持单元15b的把持器30能把持容器50内的物品a的位置。在容器50位于第二位置时,第一把持单元15a的把持器30无法把持容器50内的物品a。
104.(2-4)容器驱动部54
105.图5a是图1a的物品把持系统110的容器50向右方水平移动时的该物品把持系统110的主视图。图5b是从正下方观察图5a的物品把持系统110时的仰视图。
106.在图5a和图5b中,容器驱动部54能以电机或流体压为驱动源使容器50水平移动。
107.如图1a、图1b、图5a以及图5b所示,容器驱动部54具有2个立方体形状的驱动体540。在将图1a主视跟前设为前方时,将位于2个排出斜槽60的前方的驱动体称为第一驱动体541,将位于后方的驱动体称为第二驱动体542。
108.另外,如图1a和图1b所示,在2个排出斜槽60的前方,上下平行地设置有2个水平支柱,在后方也上下平行地设置有2个水平支柱。在图1b的主视中,以左下侧的支柱为第一水平支柱551并从该处起按顺时针称为第二水平支柱552、第三水平支柱553以及第四水平支柱554。因而,在图1a的主视中,下侧的水平支柱是第一水平支柱551,上侧的水平支柱是第二水平支柱552。
109.容器驱动部54的第一驱动体541具有左右移动机构56(参照图10a和图10b),能沿着第一水平支柱551和第二水平支柱552水平移动。另外,容器驱动部54的第二驱动体542也具有左右移动机构56,能沿着第三水平支柱553和第四水平支柱554水平移动。第一驱动体541与第二驱动体542同步移动。
110.这样,在物品把持系统110中,第一把持单元15a和第二把持单元15b在水平方向上配置,容器50能通过左右移动机构56在左右方向上水平移动,因此能使容器50内的物品组a1的位置与按每一把持单元15设定的物品把持位置一致。
111.图6是图5a的物品把持系统110的容器50向上方铅垂移动时的该物品把持系统110的侧视图。在图6中,容器驱动部54能以电机或流体压为驱动源使容器50铅垂移动。
112.如图1a、图1b以及图1d所示,载置面52具有从其下表面的4角向铅垂下方延伸的4个铅垂支柱。在图1d的主视中,以左上侧的支柱为第一铅垂支柱521并从该处起按顺时针称为第二铅垂支柱522、第三铅垂支柱523以及第四铅垂支柱524。因而,在图1a的主视中,左侧的支柱是第一铅垂支柱521,右侧的支柱是第二铅垂支柱522。另外,在图1b的主视中,右侧的支柱是第三铅垂支柱523。
113.第一驱动体541具有铅垂移动机构57(图10a和图10b),能使第一铅垂支柱521和第二铅垂支柱522在铅垂方向上移动。另外,第二驱动体542也具有铅垂移动机构57,能使第三铅垂支柱523和第四铅垂支柱524在铅垂方向上移动。第一驱动体541和第二驱动体542能使第一铅垂支柱521及第二铅垂支柱522与第三铅垂支柱523及第四铅垂支柱524同步地在铅垂方向上移动。
114.这样,在物品把持系统110中,容器50能通过铅垂移动机构57在上下方向上移动,因此在容器50相对于各把持单元15在铅垂方向上分开配置的情况下,也能使容器50内的物品组a1的位置与按每一把持单元15设定的物品把持位置一致。
115.另外,在物品把持系统110中,铅垂移动机构57无需使左右移动机构56升降而只要仅使容器50升降即可,因此减轻了使容器50升降时的负荷。
116.而且,在物品把持系统110中,在比排出斜槽60的入口靠上方的空间没有配置左右
移动机构56,因此可避免向排出斜槽60的异物混入。同样地,在比排出斜槽60的入口靠上方的空间没有配置铅垂移动机构57,因此可避免向排出斜槽60的异物混入。
117.需要说明的是,作为防止异物混入对策,除了设为上述这样的在比排出斜槽60的入口靠上方的空间没有配置左右移动机构56和铅垂移动机构57的构成之外,还能设置混入对策的盖并将其配置在比排出斜槽60靠上方的位置。
118.(2-5)排出斜槽60
119.如图1a所示,物品把持系统110具备2个排出斜槽60。将图1a的主视左侧的排出斜槽60设为第一排出斜槽60a,将图1a的主视右侧的排出斜槽60设为第二排出斜槽60b。不过,在说明共用的构成和功能时,仅称为排出斜槽60。
120.排出斜槽60是漏斗状的部件。排出斜槽60配置在把持单元15的正下方。具体地说,在第一把持单元15a的正下方配置第一排出斜槽60a,在第二把持单元15b的正下方配置第二排出斜槽60b。
121.容器50配置在第一把持单元15a与第一排出斜槽60a之间或者第二把持单元15b与第二排出斜槽60b之间。
122.第一排出斜槽60a在容器50位于第二把持单元15b与第二排出斜槽60b之间时,接受第一把持单元15a的把持器30解除把持而落下的物品a并将其排出到物品把持系统110之外。
123.同样地,第二排出斜槽60b在容器50位于第一把持单元15a与第一排出斜槽60a之间时,接受第二把持单元15b的把持器30解除把持而落下的物品a并将其排出到物品把持系统110之外。
124.在本实施方式中,使用了2个排出斜槽,但不限于此,第一把持单元15a和第二把持单元15b有时也共享1个排出斜槽。另外,也能不使用排出斜槽而直接排出到外部。
125.(2-6)控制部70
126.控制部70具有省略图示的cpu、rom、ram等存储器。如图2所示,控制部70与单元驱动部10、把持部件驱动机构30b、计量器40、容器驱动部54电连接。
127.控制部70通过cpu执行存储器中存储的程序,来进行单元驱动部10、把持部件驱动机构30b、容器驱动部54等物品把持系统110的各种构成的动作的控制、利用计量器40计量出的物品a的重量值的组合计算等。
128.需要说明的是,控制部70的各种功能既可以由软件实现,也可以由硬件实现,还可以通过由硬件和软件进行协作来实现。
129.控制部70经由把持部件驱动机构30b驱动把持爪30a,使把持爪30a把持物品a,之后使物品a的把持解除。在此,“把持”是指图4a所示这样的位于相互分开的位置的多个把持爪30a沿径向向内移动,移动到图4b所示这样的相互接近的位置,“解除把持”是指,把持后再次回到图4a所示这样的相互分开的位置。
130.(3)物品把持系统的动作
131.参照附图对由控制部70控制的物品把持系统110的动作进行说明。需要说明的是,在此,以具有多个把持模块20的把持单元15为例进行说明,但能应用于具备单一的把持模块20的把持单元15。
132.图7是物品把持系统110的动作的定时图。另外,图8a~图8e是物品把持系统110的
动作流程图。
133.在图7中,最上段的定时图示出了容器50的上下方向的位置。从上起第2段的定时图示出了图5a的主视中的容器50的左右方向的位置。
134.从上起第3段的定时图以图5a的主视中的跟前为前示出了第一把持单元15a的前后方向的位置。从上起第4段的定时图示出了第一把持单元15a的开闭状态。从上起第5段的定时图示出了第二把持单元15b的前后方向的位置。从上起第6段的定时图示出了第二把持单元15b的开闭状态。
135.在图7中,比时间t0靠左侧是运转停止状态,是图5a所示的状态。时间t0是第一把持单元15a开始向前方的移动、容器50开始向左方的移动的时点。
136.(步骤s1)
137.首先,控制部70判断运转开始指令的有无,在有运转开始指令时,前进至步骤s2。
138.(步骤s2)
139.接着,控制部70进行初始动作。通过初始动作使第一把持单元15a和第二把持单元15b向图1b所示的单元初始位置移动。另外,通过初始动作,把持器30的把持爪30a成为直至图4c所示的虚拟圆c1的位置为止关闭的初始状态。而且,通过初始动作,容器50向图5a所示的容器初始位置移动。
140.即使第一把持单元15a和第二把持单元15b从最初起就位于单元初始位置,另外,即使把持爪30a从最初起就是初始状态,进而,容器50从最初起就位于容器初始位置,也进行固定时间的初始动作。控制部70在初始动作完成时,前进至步骤s3。
141.(步骤s3)
142.接着,控制部70开始计时器的计时,同时使第一把持单元15a向前方移动,并且,将把持器30的把持爪30a从初始状态切换为第二状态(打开状态),而且使容器50向左方移动。控制部70将该时点设为t0。
143.(步骤s4)
144.接着,在从t0经过了t1秒时,控制部70使第一把持单元15a向前方的移动停止,并且使容器50向左方的移动停止。
145.此时,容器50位于第一把持单元15a的下方。另外,在从容器50观察时,第一把持单元15a的整体位于容器50内的偏向前侧的区域的上方。
146.(步骤s5)
147.接着,控制部70使容器50上升。此时,使第二把持单元15b进行排出动作,但第一次是空排出。在图7的定时图中,与容器50向左方的移动停止了的时间t1同时向上方移动。但是,也可以在时间t0与时间t1之间开始容器50向上方的移动。
148.此时,控制部70将第二把持单元15b的把持爪30a的状态切换为第二状态(打开状态),进行将物品a的把持解除这样的动作。其原因是,由于本动作的流程以步骤s3到步骤s49为一个周期进行循环,因此需要使由第二把持单元15b最后把持的物品a在此排出。
149.(步骤s6)
150.接着,在从t0经过了t2秒时,控制部70使容器50的上升停止。此时,容器50到达了第一把持单元15a的正下方中的、把持器30的把持爪30a能把持容器50内的物品a的位置。在该位置处,把持爪30a进入容器50内的物品组a1,同时把持爪30a回到初始状态。
151.在此,在物品把持系统110中,通过在容器50结束上升前结束左右移动以及单元驱动部10的前后移动,从而避免了使容器50内的物品组a1向前后或左右任意的方向偏移。
152.另外,在物品把持系统110中,通过在容器50结束上升前将把持爪30a切换为第二状态(把持爪30a已打开的打开状态),从而避免了使容器50内的物品a向把持爪30a的外侧偏移。
153.(步骤s7)
154.接着,在从t0经过了t3秒时,控制部70将把持爪30a从初始状态向第一状态(关闭状态)切换,使把持爪30a把持物品a。
155.这样在物品把持系统110中,由于把持爪30a在进入到容器50内的物品组a1之中的状态下切换为第一状态(把持爪30a已关闭的关闭状态),因此能可靠地保持物品a。
156.优选控制部70使多个把持器30同时把持物品a。但是,不限于此,控制部70也可以使多个把持器30按不同的定时把持物品a。
157.(步骤s8)
158.接着,在从t0经过了t4秒时,控制部70在保持维持多个把持器30把持着物品a的状态下,使容器50下降。
159.(步骤s9)
160.接着,在从t0经过了t5秒时,控制部70使第一把持单元15a向后方移动。由于容器50在时间t4到时间t5的期间下降规定距离,所以把持爪30a与容器50内的物品组a1分开,因此即使第一把持单元15a向后方移动,把持爪30a所把持的物品a与容器50内的物品组a1也不会发生干扰。
161.(步骤s10)
162.接着,控制部70计量与第一把持单元15a的各计量器40对应的把持器30所把持的物品a的重量。
163.这样在物品把持系统110中,是容器50向上下/左右移动且把持单元15向前后移动的类型,因此,把持单元15能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
164.(步骤s11)
165.接着,控制部70对计量器40的计量结果中的至少一个是否符合用于不将把持器30所把持的物品a排出到排出斜槽60而使其回到容器50的规定条件进行判定。
166.在此,具体地说,规定条件是指计量器40计量出的物品a的重量值不是预先设定的目标重量值。在利用了计量器40计量出的物品a的重量值的组合计量的情况下,组合计算的结果是,不参加排出的把持器30所把持的物品a的重量值也不是目标重量值而符合规定条件。
167.在控制部70判定为计量器40的计量结果都不符合规定条件时,前进至步骤s17。
168.(步骤s12)
169.接着,控制部70控制符合上述规定条件的把持器30的把持部件驱动机构30b,使该把持器30解除物品a的把持。
170.换言之,如果有把持着重量值不是目标重量值的物品a的把持器30,则控制部70使物品a的把持解除,使物品a在容器50内落下。在容器50内落下后的物品a被再利用为物品组a1的物品a。
171.另一方面,控制部70针对把持着重量值为目标重量值的物品a的把持器30,使其维持把持。
172.(步骤s13)
173.接着,在从t0经过了t6秒时,控制部70将容器50的下降停止,同时使容器50向右方移动。
174.(步骤s14)
175.接着,在从t0经过了t7秒时,控制部70使第二把持单元15b向前方移动,并且将把持器30的把持爪30a从初始状态切换为第二状态(打开状态)。控制部70使容器50向右方的移动继续。
176.(步骤s15)
177.接着,在从t0经过了t8秒时,控制部70使第二把持单元15b向前方的移动停止,并且使容器50向右方的移动停止。
178.此时,容器50位于第二把持单元15b的下方。另外,从容器50观察时,第二把持单元15b的整体位于容器50内的偏向前侧的区域的上方。
179.(步骤s16)
180.接着,控制部70使容器50上升。在图7的定时图中,与容器50向右方的移动停止的时间t8同时向上方移动。但是,也可以在时间t7与时间t8之间开始容器50向上方的移动。
181.(步骤s17)
182.接着,在从t0经过了t9秒时,控制部70将第一把持单元15a的把持爪30a中的、在前面的步骤s12中把持着重量值为目标重量值的物品a的把持爪30a的状态从第一状态(关闭状态)切换为第二状态(打开状态),解除第一把持单元15a的把持爪30a对物品a的把持,将物品a向下方的第一排出斜槽60a排出。
183.这样,把持单元15与容器50的位置关系形成了容器50防碍第二把持单元15b所把持的物品的排出但不防碍第一把持单元15a所把持的物品的排出的第二位置关系。
184.(步骤s18)
185.接着,在从t0经过了t10秒时,控制部70使容器50的上升停止。此时,容器50到达了第二把持单元15b的正下方中的、把持器30的把持爪30a能把持容器50内的物品a的位置。在该位置处,把持爪30a进入到容器50内的物品组a1,同时把持爪30a回到初始状态。
186.在此,通过在容器50结束上升前结束左右移动以及单元驱动部10的前后移动,从而避免了使容器50内的物品组a1向前后或左右任意的方向偏移。
187.另外,通过在容器50结束上升前将把持爪30a切换为第二状态(把持爪30a已打开的打开状态),从而避免了使容器50内的物品a向把持爪30a的外侧偏离。
188.(步骤s19)
189.接着,在从t0经过了t11秒时,控制部70将第二把持单元15b的把持爪30a从初始状态向第一状态(关闭状态)切换,使把持爪30a把持物品a。
190.这样,在物品把持系统110中,在把持爪30a进入到容器50内的物品组a1之中的状态下切换为第一状态(把持爪30a已关闭的关闭状态),因此能可靠地保持物品a。
191.(步骤s20)
192.接着,在从t0经过了t12秒时,控制部70在保持维持第二把持单元15b的多个把持
器30把持着物品a的状态下,使容器50下降。
193.(步骤s21)
194.接着,在从t0经过了t13秒时,控制部70使第二把持单元15b向后方移动。由于容器50在时间t12到时间t13的期间下降规定距离,所以把持爪30a与容器50内的物品组a1分开,因此即使第二把持单元15b向后方移动,把持爪30a所把持的物品a与容器50内的物品组a1也不会发生干扰。
195.(步骤s22)
196.接着,控制部70对与第二把持单元15b的各计量器40对应的把持器30所把持的物品a的重量进行计量。这样,是容器50向上下/左右移动且把持单元15向前后移动的类型,因此,把持单元15能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
197.(步骤s23)
198.接着,控制部70对计量器40的计量结果中的至少一个是否符合用于不将把持器30所把持的物品a排出到排出斜槽60而使其回到容器50的规定条件进行判定。
199.具体地说,规定条件是指计量器40计量出的物品a的重量值不是预先设定的目标重量值。
200.控制部70在判定为计量器40的计量结果都不符合规定条件时,前进至步骤s29。
201.(步骤s24)
202.接着,控制部70控制符合上述规定条件的把持器30的把持部件驱动机构30b,使该把持器30解除物品a的把持。
203.换言之,如果有把持着重量值不是目标重量值的物品a的把持器30,则控制部70使物品a的把持解除,使物品a在容器50内落下。在容器50内落下的物品a被再利用为物品组a1的物品a。
204.另一方面,控制部70针对把持着重量值为目标重量值的物品a的把持器30,使其维持把持。
205.(步骤s25)
206.接着,在从t0经过了t14秒时,控制部70将容器50的下降停止,同时使容器50向左方移动。
207.(步骤s26)
208.接着,在从t0经过了t15秒时,控制部70使第一把持单元15a向后方移动。控制部70使容器50向左方的移动继续。
209.(步骤s27)
210.接着,在从t0经过了t16秒时,控制部70使第一把持单元15a向后方的移动停止,并且使容器50向左方的移动停止。
211.此时,容器50位于第一把持单元15a的下方。另外,在从容器50观察时,第一把持单元15a的整体位于容器50内的偏向后侧的区域的上方。
212.(步骤s28)
213.接着,控制部70使容器50上升。在图7的定时图中,与容器50向右方的移动停止的时间t16同时向上方移动。但是,也可以在时间t15与时间t16之间开始容器50向上方的移动。
214.(步骤s29)
215.接着,在从t0经过了t17秒时,控制部70将第二把持单元15b的把持爪30a中的、把持着在前面的步骤s24中重量值为目标重量值的物品a的把持爪30a的状态从第一状态(关闭状态)切换为第二状态(打开状态),解除第二把持单元15b的把持爪30a对物品a的把持,将物品a向下方的第二排出斜槽60b排出。
216.这样,把持单元15与容器50的位置关系形成了容器50妨碍第一把持单元15a所把持的物品的排出但不防碍第二把持单元15b所把持的物品的排出的第一位置关系。
217.(步骤s30)
218.接着,在从t0经过了t18秒时,控制部70使容器50的上升停止。此时,容器50到达了第一把持单元15a的正下方中的、把持器30的把持爪30a能把持容器50内的物品a的位置。在该位置处,把持爪30a进入到容器50内的物品组a1,同时把持爪30a回到初始状态。
219.在此,通过在容器50结束上升前结束左右移动以及单元驱动部10的前后移动,从而避免了使容器50内的物品组a1向前后或左右任意的方向偏移。
220.另外,通过在容器50结束上升前将把持爪30a切换为第二状态(把持爪30a已打开的打开状态),从而避免了使容器50内的物品a向把持爪30a的外侧偏离。
221.(步骤s31)
222.接着,在从t0经过了t19秒时,控制部70将第一把持单元15a的把持爪30a从初始状态向第一状态(关闭状态)切换,使把持爪30a把持物品a。
223.这样,在物品把持系统110中,在把持爪30a进入到容器50内的物品组a1之中的状态下切换为第一状态(把持爪30a已关闭的关闭状态),因此能可靠地保持物品a。
224.(步骤s32)
225.接着,在从t0经过了t20秒时,控制部70在保持维持多个把持器30把持着物品a的状态下,使容器50下降。
226.(步骤s33)
227.接着,在从t0经过了t21秒时,控制部70使第一把持单元15a向前方移动。由于容器50在时间t20到时间t21的期间下降规定距离,所以把持爪30a与容器50内的物品组a1分开,因此即使第一把持单元15a向前方移动,把持爪30a所把持的物品a与容器50内的物品组a1也不会发生干扰。
228.(步骤s34)
229.接着,控制部70对与第一把持单元15a的各计量器40对应的把持器30所把持的物品a的重量进行计量。这样,是容器50向上下/左右移动且把持单元15向前后移动的类型,因此,把持单元15能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
230.(步骤s35)
231.接着,控制部70对计量器40的计量结果中的至少一个是否符合用于不将把持器30所把持的物品a排出到排出斜槽60而使其回到容器50的规定条件进行判定。
232.在此,具体地说,规定条件是指计量器40计量出的物品a的重量值不是预先设定的目标重量值。
233.控制部70在判定为计量器40的计量结果都不符合规定条件时,前进至步骤s41。
234.(步骤s36)
235.接着,控制部70对符合上述规定条件的把持器30的把持部件驱动机构30b进行控制,使该把持器30解除物品a的把持。
236.换言之,如果有把持着重量值不是目标重量值的物品a的把持器30,则控制部70使物品a的把持解除,使物品a在容器50内落下。在容器50内落下的物品a被再利用为物品组a1的物品a。
237.另一方面,控制部70针对把持着重量值为目标重量值的物品a的把持器30,使其维持把持。
238.(步骤s37)
239.接着,在从t0经过了t22秒时,控制部70将容器50的下降停止,同时使容器50向右方移动。
240.(步骤s38)
241.接着,在从t0经过了t23秒时,控制部70使第二把持单元15b向后方移动。控制部70使容器50向右方的移动继续。
242.(步骤s39)
243.接着,在从t0经过了t24秒时,控制部70使第二把持单元15b向后方的移动停止,并且使容器50向右方的移动停止。
244.此时,容器50位于第二把持单元15b的下方。另外,在从容器50观察时,第二把持单元15b的整体位于容器50内的偏向后侧的区域的上方。
245.(步骤s40)
246.接着,控制部70使容器50上升。在图7的定时图中,与容器50向右方的移动停止的时间t24同时向上方移动。但是,也可以在时间t23与时间t24之间开始容器50向上方的移动。
247.(步骤s41)
248.接着,在从t0经过了t25秒时,控制部70将第一把持单元15a的把持爪30a中的、在前面的步骤s36中把持着重量值为目标重量值的物品a的把持爪30a的状态从第一状态(关闭状态)切换为第二状态(打开状态),解除第一把持单元15a的把持爪30a对物品a的把持,将物品a向下方的第一排出斜槽60a排出。
249.这样,把持单元15与容器50的位置关系向容器50防碍第二把持单元15b所把持的物品的排出但不防碍第一把持单元15a所把持的物品的排出的第二位置关系切换。
250.(步骤s42)
251.接着,在从t0经过了t26秒时,控制部70使容器50的上升停止。此时,容器50到达了第二把持单元15b的正下方中的、把持器30的把持爪30a能把持容器50内的物品a的位置。在该位置处,把持爪30a进入到容器50内的物品组a1,同时把持爪30a回到初始状态。
252.在此,通过在容器50结束上升前结束左右移动以及单元驱动部10的前后移动,从而避免了使容器50内的物品组a1向前后或左右任意的方向偏移。
253.另外,通过在容器50结束上升前将把持爪30a切换为第二状态(把持爪30a已打开的打开状态),从而避免了使容器50内的物品a向把持爪30a的外侧偏离。
254.(步骤s43)
255.接着,在从t0经过了t27秒时,控制部70将第二把持单元15b的把持爪30a从初始状
态向第一状态(关闭状态)切换,使把持爪30a把持物品a。
256.这样,在物品把持系统110中,在把持爪30a进入到容器50内的物品组a1之中的状态下切换为第一状态(把持爪30a已关闭的关闭状态),因此能可靠地保持物品a。
257.(步骤s44)
258.接着,在从t0经过了t28秒时,控制部70在保持维持多个把持器30把持着物品a的状态下,使容器50下降。
259.(步骤s45)
260.接着,在从t0经过了t29秒时,控制部70使第二把持单元15b向前方移动。由于容器50在时间t28到时间t29的期间下降规定距离,所以把持爪30a与容器50内的物品组a1分开,因此即使第二把持单元15b向前方移动,把持爪30a所把持的物品a与容器50内的物品组a1也不会发生干扰。
261.(步骤s46)
262.接着,控制部70对与第二把持单元15b的各计量器40对应的把持器30所把持的物品a的重量进行计量。这样,是容器50向上下/左右移动且把持单元15向前后移动的类型,因此,把持单元15能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
263.(步骤s47)
264.接着,控制部70对计量器40的计量结果中的至少一个是否符合用于不将把持器30所把持的物品a排出到排出斜槽60而使其回到容器50的规定条件进行判定。
265.具体地说,规定条件是指计量器40计量出的物品a的重量值不是预先设定的目标重量值。
266.控制部70在判定为计量器40的计量结果都不符合规定条件时,前进至步骤s3。
267.(步骤s48)
268.接着,控制部70控制符合上述规定条件的把持器30的把持部件驱动机构30b,使该把持器30解除物品a的把持。
269.换言之,如果有把持着重量值不是目标重量值的物品a的把持器30,则控制部70使物品a的把持解除,使物品a在容器50内落下。在容器50内落下后的物品a被再利用为物品组a1的物品a。
270.另一方面,控制部70针对把持着重量值为目标重量值的物品a的把持器30,使其维持把持。
271.(步骤s49)
272.接着,在从t0经过了t30秒时,控制部70将容器50的下降停止,其后,反复进行步骤s3以后的动作。
273.上述步骤s1到步骤s49的动作是一个例子,并且各步骤的动作的顺序也可以更换。
274.(4)特征
275.(4-1)
276.在物品把持系统110中,对容器50防碍第一把持单元15a所把持的物品的排出但不防碍第二把持单元15b所把持的物品的排出的第一位置关系、以及容器50防碍第二把持单元15b所把持的物品的排出但不防碍第一把持单元15a所把持的物品的排出的第二位置关系进行切换,因此,把持单元不在保持持有物品a的状态下移动,能防止物品从各把持单元
15落下。
277.(4-2)
278.在物品把持系统110中,在水平方向上配置有第一把持单元15a和第二把持单元15b,容器50能通过左右移动机构在左右方向上水平移动,能使容器50内的物品组a1的位置与按每一把持单元15设定的物品把持位置一致。
279.(4-3)
280.在物品把持系统110中,在水平方向上配置有第一把持单元15a和第二把持单元15b,第一把持单元15a能通过第一单元驱动部10a、第二把持单元15b能通过第二单元驱动部10b在前后方向上水平移动,能使容器50内的物品组的位置与按每一把持单元15设定的物品把持位置一致。
281.(4-4)
282.在物品把持系统110中,容器50能通过铅垂移动机构在上下方向上移动,在容器50相对于各把持单元15在铅垂方向上分开配置的情况下,也能使容器50内的物品组a1的位置与按每一把持单元15设定的物品把持位置一致。
283.(4-5)
284.在物品把持系统110中,在使容器50上升时,通过在容器50结束上升前结束左右移动以及单元驱动部10的前后移动,从而能避免容器50内的物品组a1向前后或左右任意的方向偏移。
285.(4-6)
286.把持单元15的多个把持爪30a至少切换为第一状态和第二状态中的任意的状态。第一状态是将把持爪30a彼此的相对距离缩短到第一距离来把持物品的状态。第二状态是将把持爪30a彼此的相对距离扩大到比第一距离大的第二距离来解除物品的把持的状态。
287.(4-7)
288.在物品把持系统110中,在使容器50上升时,在容器50结束上升前将把持爪30a切换为第二状态(把持爪30a已打开的打开状态),从而避免使容器50内的物品a向把持爪30a的外侧偏离。
289.(4-8)
290.在物品把持系统110中,在把持爪30a进入到容器50内的物品组a1之中的状态下切换为第一状态(把持爪30a已关闭的关闭状态),因此能可靠地保持物品a。
291.(4-9)
292.在物品把持系统110中,是容器50向上下/左右移动且把持单元15向前后移动的类型,因此,把持单元15能在把持前预先向前后方向移动,并在抓取后立刻进行计量。
293.(4-10)
294.在物品把持系统110中,铅垂移动机构57无需使左右移动机构56升降而只要仅使容器50升降即可,因此减轻了使容器50升降时的负荷。
295.(4-11)
296.在物品把持系统110中,通过避免在比排出斜槽60的入口靠上方的空间配置左右移动机构56,从而防止了向排出斜槽60的异物混入。
297.(4-12)
298.在物品把持系统110中,通过避免在比排出斜槽60的入口靠上方的空间配置铅垂移动机构57,从而防止了向排出斜槽60的异物混入。
299.(4-13)
300.在物品把持系统110中,控制部70使容器50内的物品组a1向第一把持单元15a把持物品a的第一把持位置移动。而且,控制部70在使第一把持单元15a把持物品后,使容器50内的物品组a1向第二把持单元15b把持物品的第二把持位置移动。
301.(4-14)
302.在物品把持系统110中,控制部70在使容器50内的物品组a1向第二把持位置移动后,使第一把持单元15a解除物品a的把持,使第二把持单元15b从容器50内的物品组a1把持物品a。
303.(4-15)
304.物品把持系统110使控制部70让第一把持单元15a解除物品a的把持的动作与让第二把持单元15b把持物品a的动作联动。
305.(5)其它
306.在此,对单元驱动部10的前后移动机构11、容器驱动部54的左右移动机构56以及铅垂移动机构57的构成进行例示性说明。
307.(5-1)前后移动机构11
308.图9是示出前后移动机构11的一个例子的俯视图。在图9中,前后移动机构11包括块111、滚珠丝杠112、伺服电机113、2个线性引导件114以及2个引导块115。
309.在块111固定把持单元15的连结部件16。在块111的左右端部固定有引导块115。1个引导块115与1个线性引导件114以能滑动的方式组合起来。线性引导件114支承于单元驱动部10的框架12。在块111移动时,引导块115沿着线性引导件114移动。
310.在块111形成有将其中央贯通并与滚珠丝杠112螺合的螺纹孔。滚珠丝杠112通过伺服电机113旋转。
311.通过伺服电机113使滚珠丝杠112向一个方向旋转,从而块111前进,通过伺服电机113使滚珠丝杠112向另一方向旋转,从而块111后退。
312.其结果是,经由连结部件16与块111连结的把持单元15能向前后水平移动。
313.(5-2)左右移动机构56
314.图10a是示出容纳左右移动机构56的容器驱动部54的一个例子的主视图。在图10a中,左右移动机构56设置于第一驱动体541和第二驱动体542各者。以下,以第一驱动体541为例进行说明。
315.左右移动机构56包括伺服电机561、2个线性引导件562、2个引导块563以及滚珠丝杠564。在第一驱动体541的上下的端部固定有引导块563。1个引导块563与1个线性引导件562以能滑动的方式组合起来。
316.在第一驱动体541的情况下,线性引导件562支承于第一水平支柱551和第二水平支柱552。在第二驱动体542的情况下,线性引导件562支承于第三水平支柱553和第四水平支柱554。
317.在第一驱动体541移动时,引导块563沿着线性引导件562移动。在第一驱动体541形成有将其中央水平贯通并与滚珠丝杠564螺合的螺纹孔。滚珠丝杠564通过伺服电机561
旋转。
318.通过伺服电机561使滚珠丝杠564向一个方向旋转,从而第一驱动体541向左方移动,通过伺服电机561使滚珠丝杠564向另一方向旋转,从而第一驱动体541向右方移动。
319.(5-3)铅垂移动机构57
320.图10b是示出容纳铅垂移动机构57的容器驱动部54的一个例子的主视图。在图10b中,铅垂移动机构57设置于第一驱动体541和第二驱动体542各者。以下,以第二驱动体542为例进行说明。
321.铅垂移动机构57包括伺服电机571、2个线性引导件572、2个引导块573以及滚珠丝杠574。在第二驱动体542的左右端部固定有引导块573。1个引导块573与1个线性引导件572以能够滑动的方式组合起来。
322.在第二驱动体542的情况下,线性引导件572支承于第三铅垂支柱523和第四铅垂支柱524。在第一驱动体541的情况下,线性引导件572支承于第一铅垂支柱521和第二铅垂支柱522。
323.在第二驱动体542移动时,引导块573沿着线性引导件572移动。在第二驱动体542形成有将其中央铅垂贯通并与滚珠丝杠574螺合的螺纹孔。滚珠丝杠574通过伺服电机571进行旋转。
324.通过伺服电机571使滚珠丝杠574向一个方向旋转,从而第二驱动体542向上方移动,通过伺服电机571使滚珠丝杠574向另一方向旋转,从而第二驱动体542向右方移动。
325.附图标记说明
326.10
…
单元驱动部(驱动部);10a
…
第一单元驱动部(驱动部);10b
…
第二单元驱动部(驱动部);11
…
前后移动机构(第二水平移动机构);15
…
把持单元;15a
…
第一把持单元(把持单元);15b
…
第二把持单元(把持单元);56
…
左右移动机构(第一水平移动机构);57
…
铅垂移动机构;30a
…
把持爪(爪);60
…
排出斜槽;60a
…
第一排出斜槽;60b
…
第二排出斜槽;70
…
控制部;110
…
物品把持系统。
327.现有技术文献
328.专利文献
329.专利文献1:特开平6-3182号公报。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1