利用探察线圈型传感器的金属探测系统的制作方法
1.本发明涉及利用探察线圈型传感器的金属探测系统,更详细地说,涉及对如枪支类的特定物体进行检测并追踪这种物体的技术。
背景技术:
2.在磁传感器中采用了squid、fiber-optic、flux-gate、magnetic impedance等多种技术,在各个所需的产业领域被高度化并应用。尤其,随着第四次产业革命的到来,出现了各种iot应用产品,磁传感器技术在日常生活领域中的适用范围也在扩大。
3.随之,国内的三星电子、国外的霍尼韦尔(honeywell)等公司正在研究进一步实现小型化的芯片(chip)形态的磁传感器,而且为了提高检测灵敏度或范围,减少检测误差,正在进行各种研究开发。
4.并且,最近在美国等地由枪支引起的事故增加,由此,对用于提高如枪支等特定物体的探测性能的系统的兴趣和需求正在增加。
5.在大韩民国登录特许第10-0867375号(发明名称:利用3个磁传感器的移动体的位置及方向信息测定装置及方法)中公开了一种方法,包括:设置步骤,在上述移动体上设置与由x,y轴构成的面分别对应的2个磁传感器,并且在上述移动体上设置与z轴对应的磁传感器;存储步骤,移动体测定分别与上述各个x,y,z轴对应的地球磁场,将基准磁场的信息值存储于内部的存储器;判断步骤,移动体一边移动,一边对x,y,z轴测定磁场的大小,然后判断测定到的z轴磁场值与z轴基准磁场值之差的绝对值是否小于磁传感器所具有的误差范围;以及更新步骤,在判断步骤中判断为z轴的测定值与基准值之差的绝对值小于传感器的误差范围时,利用x,y轴磁场测定值,更新移动体的方向信息值。
6.现有技术文献
7.专利文献:大韩民国登录特许第10-0867375号
技术实现要素:
8.要解决的技术问题
9.用于解决如上所述问题的本发明的目的在于,无需对不具有磁气成分的芯和线圈施加任何变化,也能够利用含铁物体的微磁场来检测物体的位置、位移等。
10.而且,本发明的目的在于,随着含铁物体发生位移,相对于传感器发生了极性变更时,防止因磁场暂时减弱的范围(无极性范围)而导致检测滞后。
11.另外,本发明的目的在于,能够针对多个物体进行位置测定等,能够判断多个物体各自的移动路径等。
12.而且,本发明的目的在于,对如枪支类的特定物体进行检测并对这种物体进行追踪。
13.本发明所要解决的技术课题不限于上述的技术课题,对于没有提及的其他技术课题,本领域技术人员应能够根据下面的记载而明确理解。
14.用于解决问题的手段
15.用于实现上述目的的本发明的结构,包括:传感器模块,包括至少一个以上的传感器,对周围移动的物体进行检测,所述传感器具备外壳、芯以及线圈,所述外壳具备内部空间,所述芯形成为被引入所述外壳的内部空间,所述线圈卷绕于与所述芯的位置对应的所述外壳的外周面的一部位;摄像部,对在所述传感器模块的周围移动的所述物体或携带所述物体的人员进行摄像;阻抗匹配部,与所述传感器模块连接,执行阻抗匹配;以及放大部,与所述阻抗匹配部连接,将当所述物体靠近所述传感器模块时生成的微电流和微电压放大,所述传感器模块通过与含铁(fe)的所述物体之间的距离变化而形成感应磁场,利用基于所述传感器模块的信息和通过所述摄像部获取的摄像图像来对所述物体进行分析。
16.本发明的一实施例中,可以包括:第一控制部,与所述放大部连接,对放大的电流和电压的波形进行分析;以及第二控制部,与所述第一控制部连接,生成对所述物体的移动和磁密度进行的分析的物体分析信息,与所述摄像部连接而收集所述摄像图像。
17.本发明的一实施例中,所述第二控制部,能够利用所述物体分析信息和所述摄像图像来执行针对所述物体的分类。
18.本发明的一实施例中,所述第二控制部,能够在判断所述物体的磁通密度是否包含在预定的磁通密度范围之后,利用所述摄像图像判断所述物体的种类。
19.本发明的一实施例中,在所述物体被判断为是枪支类时,所述第二控制部能够生成警告信号。
20.本发明的一实施例中,可以包括:输出部,与所述第二控制部连接,视觉性地输出所述物体的位置变化,输出所述警告信号。
21.本发明的一实施例中,可以形成有多个所述传感器模块,在多个所述传感器模块分别连接有所述阻抗匹配部和所述放大部。
22.本发明的一实施例中,多个所述传感器能够分别并列或以放射状配置。
23.本发明的一实施例中,所述传感器所具备的多个线圈分别直列配置。
24.发明效果
25.基于如上所述结构的本发明的效果如下:能够检测含铁物体的微磁场及磁通量的变化,能够以超低电力检测含铁物体的位置、位移等。
26.而且,本发明的效果还有,随着含铁物体发生位移,相对于传感器发生了极性变更时,即使出现了磁场暂时减弱的范围(无极性范围),也能够通过相邻的其他传感器或线圈检测含铁物体的磁场,装置能够正常且连续地工作。
27.此外,本发明的效果还有,能够与传感器或传感器模块的配置等无关地进行检测及测定。
28.而且,本发明的效果还有,能够利用多个传感器模块进行对多个物体的位置测定等,从而能够判断多个物体各自的移动路径等。
29.而且,本发明的效果还有,通过利用基于传感器模块的物体分析信息和基于摄像部的摄像图像来复合地执行对于物体的测定,因此能够提高对于物体的测定速度和测定精度。
30.而且,本发明的效果还有,能够检测含铁物体的微磁场及磁通量的变化,所以能够不受空气、土壤、水等的影响地发挥同一性能。
31.应理解为本发明的效果不限于上述的效果,还包括能够根据本发明的说明书或权利要求书中记载的发明结构推测的所有效果。
附图说明
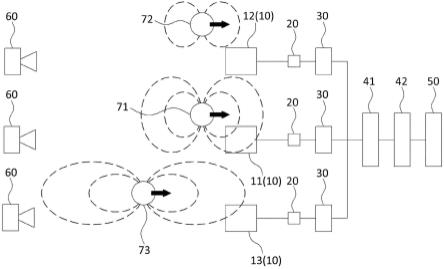
32.图1和图2是基于本发明的一实施例的金属探测系统的概略图。
33.图3是基于本发明的第一实施例的传感器的概略图。
34.图4是基于本发明的第一实施例的传感器模块的概略图。
35.图5是基于本发明的第二实施例的传感器的概略图。
36.图6是基于本发明的第二实施例的传感器模块的概略图。
37.图7是基于本发明的各实施例的传感器的磁场区域的示意图。
38.图8是基于本发明的第三实施例的传感器的概略图。
39.图9是基于本发明的第三实施例的传感器模块的概略图。
40.图10是基于本发明的第四实施例的传感器模块的概略图。
41.图11和图12是物体通过基于本发明的第一实施例的传感器时的信号模式的图表。
具体实施方式
42.所述本发明的最优选的一实施例,包括:传感器模块,包括至少一个以上的传感器,对周围移动的物体进行检测,上述传感器具备外壳、芯以及线圈,上述外壳具备内部空间,上述芯形成为被引入上述外壳的内部空间,上述线圈卷绕于与上述芯的位置对应的上述外壳的外周面的一部位;摄像部,对在上述传感器模块的周围移动的上述物体或携带上述物体的人员进行摄像;阻抗匹配部,与所述传感器模块连接,执行阻抗匹配;以及放大部,与上述阻抗匹配部连接,将当上述物体靠近上述传感器模块时生成的微电流和微电压放大,上述传感器模块通过与含铁(fe)的上述物体之间的距离变化而形成感应磁场,利用基于上述传感器模块的信息和通过上述摄像部获取的摄像图像来对上述物体进行分析。
43.下面,参照附图说明本发明。但是,本发明可以通过多种不同的方式来实现,不限于在此说明的实施例。而且,附图中,为了便于清楚地说明本发明,将与说明无关的部分省略,在整个说明书中,对类似的部分赋予了类似的附图标记。
44.在整个说明书中,当记载某个部分与其他部分“连接(接续,接触,结合)”时,不仅包括“直接连接”的情况,还包括中间经由其他部件“间接连接”的情况。另外,当记载某个部分“包括”某个结构要素时,在没有特别强调的情况下,不是要排除其他结构要素,而是还可以包括其他结构要素。
45.本说明书中使用的用语,只是为了说明特定的实施例而使用的,并不意图限定本发明。单数的表述除了在文脉上明确表示不同意思的情况以外,还包括复数的情况。应理解为,在本说明书中,“包括”或“具备”等用语意在表示说明书中记载的特征、数字、步骤、动作、结构要素、部件或它们的组合的存在性,并不是要排除一个或一个以上的其他特征、数字、步骤、动作、结构要素、部件或它们的组合的存在或附加可能性。
46.下面,参照附图,详细说明本发明。
47.图1和图2是基于本发明的一实施例的金属探测系统的概略图。另外,图3是基于本发明的第一实施例的传感器100的概略图,图4是基于本发明的第一实施例的传感器模块10
的概略图。另外,图5是基于本发明的第二实施例的传感器100的概略图,图6是基于本发明的第二实施例的传感器模块10的概略图。并且,图7是基于本发明的各实施例的传感器100的磁场区域的示意图。此处,图7的(a)是表示含铁(fe)物体70相对于基于本发明的第一实施例的传感器模块10移动的情况的图,图7的(b)是表示含铁(fe)物体70相对于基于本发明的第二实施例的传感器模块10移动的情况的图。方向可以根据各个附图的上下左右为基准设定。以下相同。本发明的附图中,为了方便起见,对含铁(fe)物体70示出n极和s极,但并不表示物体70本身是磁铁或电磁铁。在图4、图6及图9中,分别连接有第一控制部41和第二控制部42,但这只是用箭头表示信号传递,并不表示每个传感器模块10都单独形成有第一控制部41和第二控制部42。
48.如图1至图3所示,本发明的金属探测系统,包括:传感器模块10,其包括至少一个以上的传感器100,对周围移动的物体70进行检测,上述传感器100具备外壳130、芯110以及线圈120,上述外壳130具备内部空间,上述芯110形成为引入到外壳130的内部空间,上述线圈120卷绕于与芯110的位置对应的外壳130的的外周面的一部位;摄像部60,对在传感器模块10的周围移动的物体70或携带上述物体70的人员进行摄像;阻抗匹配部20,与多个传感器模块10分别连接,执行阻抗匹配;以及放大部30,与阻抗匹配部20连接,将当物体70靠近传感器模块10时生成的微电流和微电压放大。
49.传感器模块10能够通过与含铁(fe)物体70之间的距离变化而形成感应磁场。即,在传感器100中,能够通过与含铁(fe)物体70之间的距离变化而形成感应磁场,含铁(fe)物体70借助具有磁性的铁(fe)的性质而具备微磁场,通过这种含铁(fe)物体70的移动或方向转换,能够在传感器100中形成感应磁场。
50.具体地,芯110完全不具备磁气成分,而通过含铁物体70所具备的磁场的靠近或远离,能够在传感器100形成感应磁场。而且,通过如上所述的感应磁场的生成,能够在线圈120形成微电流和微电压。也就是说,通过上述的结构,即使含铁(fe)物体70对芯110产生的磁通量为纳米(nano)单位,或者,由含铁(fe)物体70产生的磁场具有几mm高斯以下的磁通密度,每当含铁(fe)物体70的位置或方向变化时,都能够检测对芯110产生的磁通量。
51.为了实现上述的功能,芯110的磁滞(hysteresis)特性良好,能够具有相对高的导磁率。具体地,为了形成芯110,以铁(fe)4.6~5.2重量%、镍(ni)74.3~75.6重量%、硅(si)12.5~13重量%、铬(cr)1.5~1.6重量%及钴(co)5.8~5.9重量%的比率,将各个金属粉末混配,在1300℃以上的温度下射出,考虑到给远距离检测带来影响的导磁率及冲击,形成为厚度0.025mm以下的条带(或带)形状,能够实现薄型轻量化。而且,也可以将多个如上所述形成的薄型的芯110重叠而成为一体化。
52.在此,镍成分的含量在芯110中占主要重量%,所以重要的是防止在置于低温时熔解,而且上述钴具有在的温度下磁特性(磁滞)下降的特性,所以重要的是射出温度不会提高到1300℃以上。而且,由于射出对冲击敏感,所以一边放慢射出速度,一边快速冷却到106℃/sec,从而能够使芯110具备耐久性。
53.如上所述,在将多种金属粉末混配的情况下,混配的粉末的状态为不规则状态,所以为了使混配的粉末的粒子维持在一定方向上整顿的状态,加热到一定温度,进行热处理直到粒子即将溶解,以提供强磁场,从而能够使粒子整列。而且,为了使粒子维持整列状态,将通过如上所述过程形成的芯110位于磁场内,进行磁场处理,慢慢冷却。由此,芯110的磁
滞和导磁率能够增大。
54.芯110的厚度越薄,特性越好,而且为了耐冲击,重量要轻,所以优选采用非晶质体或坡莫合金(permalloy)芯110,坡莫合金金属对冲击的变化幅度比非晶质金属高,所以本发明的金属探测系统中,能够使用非晶质(无定形)芯110。
55.外壳130可以形成为具备内部空间的圆筒形,外壳130可以采用绝缘材质形成。而且,芯110作为通过线圈120感应的磁束的通路,如上所述可以形成在与线圈120的位置对应的外壳130的内部空间。而且,线圈120可以采用铁线、镍铬线、铜线等金属线形成。
56.本发明的金属探测系统能够测定至少一个以上的物体70的移动。而且,不仅能够测定与物体70的移动相关的位置、方向、速度等,还能够测定物体70的个数和磁通密度。而且,为此形成有多个传感器模块10,可以在多个传感器模块10分别连接阻抗匹配部20和放大部30。
57.另外,本发明的金属探测系统还可以包括:第一控制部41,与放大部30连接,对放大的电流和电压的波形进行分析;以及第二控制部42,与第一控制部41连接而生成对物体70的移动和磁密度进行分析的物体70的分析信息,与摄像部60连接而收集摄像图像。
58.在本发明的实施例中,对传感器模块10(第一~第三传感器模块)以一定间隔排列配置的情况进行说明,但是并不限于此,可以根据本发明的金属探测系统的用途等来变更传感器模块10的配置。
59.如图1和图2所示,在本发明的金属探测系统中,能够利用多个物体70各自的位置、方向及速度来分析移动路径和移动速度等,还能够分析一个物体70与其他物体70之间的相对运动。
60.作为具体的实施例,如图1所示,第一人员携带的第一物体71可以从图中的左侧向右侧,朝向第一传感器模块11与第二传感器模块12之间移动,第二人员携带的第二物体72可以以图为基准向第二传感器模块12的上侧移动,第三人员携带的第三物体73可以向第一传感器模块11与第三传感器模块13之间移动。
61.在本发明的实施例中,对各个人员携带各自的物体70而移动的情况进行说明,对通过摄像部60来执行对各个人员的摄像的情况进行说明,但是为了方便起见,在图1和图2仅示出物体70。物体70可以携带在人员的衣服内侧或外侧。
62.以下,说明基于各个传感器模块10的物体70的移动、个数,基于对磁通密度等的测定来生成物体70的分析信息的情况进行说明。
63.第一物体71的磁通密度可以为5x10-17t(tesla),速度可以为4km/h(普通人的行走速度),第二物体72的磁通密度可以为3x10-17t(tesla),速度可以为4km/h,第三物体73的磁通密度可以为5x10-17t(tesla),速度可以为6km/h。
64.而且,如图2所示,第四人员携带的第四物体74可以从第二传感器模块12朝向第一传感器模块11的方向移动,第五人员携带的第五物体75可以朝向第一传感器模块11和第三传感器模块13移动。在此,第四物体74的磁通密度可以是5x10-17t(tesla),速度可以为4km/h,第五物体75的磁通密度可以为5x10-17t(tesla),速度可以为6km/h。
65.首先,在物体70的个数分析中,在第一物体71、第二物体72及第三物体73如上所述移动的情况下,在第一传感器模块11、第二传感器模块12及第三传感器模块13中,通过各个物体70的移动而在传感器100中生成信号,这种各个传感器100的信号可以经由与各个传感
器模块10连接的阻抗匹配部20和放大部30传递到第一控制部41。第一控制部41对这种多个信号模式进行分析,从而能够判断靠近各个传感器模块10而通过的物体70的数量。针对基于各个物体70的磁通密度和速度的各个信号模式和如上所述的2个以上的信号模式重叠时的复合模式的数据被存储于第一控制部41,第一控制部41对各个信号模式进行分析,导出物体70固有的信号模式数,从而能够分析通过本发明的金属探测系统的物体70的数量。在此,可以实验性地存储针对各个信号模式或复合模式的数据。但是,对于用于特定物体70的信号分离技术,可以使用其他现有技术。
66.如上所述的原理也能够同样适用于第四物体74和第五物体75移动的情况。其结果,通过如上所述的第一控制部41的分析来确定各个物体70,能够分离出针对各个物体70的信号模式。
67.在本发明的实施例中,虽然对一名人员携带一个物体70的情况进行说明,但是也可以是一名人员可以携带2个以上的物体70,或者2个以上的人员搬运一个物体70。即,不限定人员与物体70的携带关系。由此,还需要判断人员携带的物体70的数量,为此利用下述的摄像部60,能够执行传感器模块10与摄像部60连动的复合的分析。对此,将在下面进行详细说明。
68.在针对各个物体70的移动路径、移动速度及磁通密度的分析中,通过第一控制部41的信号模式分析来确定各个物体70,针对各个物体70的信号模式能够被传递到第二控制部42。而且,第二控制部42能够分析各个信号模式来分析各个物体70的移动路径及移动速度。
69.具体地,如图1所示,当第一物体71、第二物体72及第三物体73向一个方向(基准方向)进行直线运动时,如上所述确定各个物体70,从而通过第一控制部41来分离出针对各个物体70的信号模式并传递给第二控制部42,第二控制部42分析出各个物体70对各个传感器模块10形成了一定强度的信号模式,由此,能够判断第一物体71、第二物体72及第三物体73正在向同一方向移动,能够通过各个物体70的信号模式来判断各个物体70的磁通密度和移动速度。在此,如同第一控制部41,在第二控制部42中存储针对基于各个物体70的磁通密度和速度的各个信号模式的数据,第二控制部42能够利用所存储的数据。
70.而且,如图2所示,在第四物体74和第五物体75分别向不同方向运动的情况下,如上所述确定各个物体70,从而通过第一控制部41分离出针对各个物体70的信号模式并传递给第二控制部42,第二控制部42对第四物体74的信号模式的强度在第一传感器模块11中逐渐加强且在第二传感器模块12中逐渐减弱的现象及针对这种强度变化的模式等进行分析,能够判断出第四物体74以相对于基准方向(第五物体75移动的方向)形成一定角度的方式移动,能够通过第四物体74的信号模式来判断磁通密度和移动速度。对第五物体75的移动的分析可以与上述的对第一物体71等的分析的事项相同。
71.以下,说明利用上述传感器模块10的信息和摄像图像的物体70的分析。
72.如图1和图2所示,形成有至少一个以上的摄像部60,能够对传感器模块10可测定的整个区域获得摄像图像。摄像部60可以对应于传感器模块10的配置而以各种方式配置。而且,作为摄像部60,可以利用相机、图像传感器等能够获得图像的所有手段。
73.能够利用基于传感器模块10的信息和通过摄像部60获得的图像、即摄像图像来对物体70进行分析。为此,第二控制部42能够利用物体70的分析信息和摄像图像来执行对物
体70的分类。在此,第二控制部42能够在判断物体70的磁通密度是否包含在预定的磁通密度范围内之后,对摄像图像进行分析来判断物体70的种类。如上所述,物体70的分析信息可以包含对于物体70的数量、各物体70的移动路径和移动速度、各物体70的磁密度等的信息。
74.第二控制部42能够判断具备预定的磁通密度范围内的磁通密度的物体70。也就是说,第二控制部42能够判断特定物体70是否通过本发明的金属探测系统。具体地,如上所述,第一控制部41确定各个物体70,分离出各个物体70的信号模式并传递给第二控制部42,第二控制部42对传递来的物体70的信号模式进行分析,能够判断该物体70的磁通密度是否包含在预定的磁通密度范围内。也就是说,每个通过本发明的金属探测系统的物体70中的铁成分的含有量不同而磁通密度不同,特定物体70种类的磁通密度能够被包含在预定的磁通密度范围内,因此第二控制部42能够利用某个物体70的磁通密度来判断该物体70是否属于特定物体70种类。
75.具体地,在枪支类的情况下,通过锻造工序,可以含有相对高密度的铁成分而具备相对大的磁通密度。由此,枪支类的磁通密度能够形成预定的磁通密度范围,第二控制部42在一个物体70的磁通密度被包含于枪支类的磁通密度范围内的情况下,能够判断该物体70属于枪支类。
76.但是,在如上所述仅通过磁通密度来执行对物体70的判别时,也会将不属于枪支类但具备属于枪支类磁通密度范围内的磁通密度的物体70判断为属于枪支类,因此在进行如上所述的初步的对物体70种类的分析之后,能够执行利用摄像图像的二次分析。以下,对于初步利用磁通密度分类为枪支类的物体70,可以称为疑似枪支类物体。
77.如上所述,在检测到疑似枪支类物体的情况下,对于疑似枪支类物体或携带上述的疑似枪支类物体的人员的摄像图像能够实时地传递到第二控制部42。在第二控制部42中存储有对于与各种枪支类对应的物体70的图像,第二控制部42对疑似枪支类物体与所存储的图像进行比较分析,从而能够确定地判断疑似枪支类物体是否属于枪支类。
78.但是,在如上所述立即利用摄像图像来执行对于疑似枪支类物体的判断时,可以是疑似枪支类物体露出到携带该物体70的人员的外侧的情况。另一方面,在疑似枪支类物体位于携带该物体70的人员的内侧时,即在疑似枪支类物体被藏在人员的衣服之间等的情况下,有可能难以如上所述立即对摄像图像与存储在第二控制部42的图像进行比较分析。
79.为了如上所述的情况,摄像部60可以具备热感应功能。尽管检测到疑似枪支类物体,但第二控制部42未在摄像图像中检测到枪支类时,第二控制部42向摄像部60传递控制信号,接收到传递来的控制信号的摄像部60开始启动热感应功能,作为对于有可能携带疑似枪支类物体而正在追踪中的人员的摄像图像,能够收集热像,将这种热像传递给第二控制部42,从而第二控制部42能够判断是否在该人员的衣服之间等存在枪支类。对于该判断,在执行摄像部60的热成像功能时,即使枪支类存在于人员的衣服之间也由于温差而显现出其形态,因此能够执行。
80.第二控制部42在将物体70判断为枪支类时,可以生成警告信号。而且,本发明的金属探测系统还可以包含输出部50,该输出部50与第二控制部42连接,视觉地输出物体70的位置变化,输出警告信号。
81.警告信号可以传递给输出部50,这种警告信号可以通过视觉或听觉来实现。而且,当如上所述在第二控制部42中确定地判断为疑似枪支类物体属于枪支类的情况下,能够将
对于携带该物体70的人员的摄像图像传送给安保人员的通信设备。
82.而且,输出部50从第二控制部42接收传递来的信息,能够将对于物体70的移动路径的三维坐标变化表示为图表或图像等,能够将对于物体70的移动速度、磁通密度等的数值信息显示在画面。
83.如上所述,初步地利用磁通密度来判断多个物体70中的疑似枪支类物体,对如上所述判断的疑似枪支类物体(或者携带该物体70的人员)的位置进行追踪,二次地利用疑似枪支类物体的物体70分析信息和摄像图像来执行针对疑似枪支类物体的分析,从而能够显著提高针对枪支类物体70的探测速度。
84.而且,由于利用基于传感器模块10的物体70的分析信息和基于摄像部60的摄像图像来复合地执行针对物体70的测定,因此能够提高针对物体70的测定精度。
85.虽然在本发明的实施例中具体地说明了对枪支类物体70进行判断的事项,但是所判断的物体70的种类不限定于枪支类,这种原理还能够同样应用到其他物体70。
86.以下,说明传感器模块10包括的传感器100的设置。图8是基于本发明的第三实施例的传感器100的概略图,图9是基于本发明的第三实施例的传感器模块10的概略图。而且,图10是基于本发明的第四实施例的传感器模块10的概略图。
87.如图3、图4、图7~图10所示,多个传感器100能够分别并列或以放射状配置。首先,说明多个传感器100分别并列配置的情况。
88.如图3和图4所示,多个传感器100分别并列配置,相对于一个外壳130的芯110及线圈120的位置与相对于其他外壳130的芯110及线圈120的位置可以不同。具体地,多个传感器100中的第1-1传感器101与第1-2传感器102对齐地并列形成,可以在第1-1传感器101的右侧部形成第1-1芯111a和第1-1线圈121a,可以在与第1-2传感器102的左侧部形成第1-2芯111b和第1-2线圈121b。
89.如图3、图4及图7所示,在含铁(fe)物体70从图中的左侧朝向右侧以靠近传感器100的方式移动时,在芯110中瞬间产生磁场变化,由此能够在线圈120感应生成微电压和微电流。此时,在含铁(fe)物体70的n极和s极转换的部位、即无极性部位(图7中用a表示)通过第1-1芯111a的情况下,通过第1-1传感器101所具备的第1-1芯111a和第1-1线圈121a感应的电压和电流的生成有可能会中断。在此,不仅是磁力线由于无极性部位而完全不会给第1-1芯111a和第1-1线圈121a带来影响的情况,如图7所示,即使磁力线给第1-1芯111a和第1-1线圈121a带来部分影响,也由于靠近无极性部位时,磁通密度显著减少,感应电压和电流的生成也有可能会中断。
90.另一方面,在同一时刻,第1-2传感器102所具备的第1-2芯111b和第1-2线圈121b受到由含铁(fe)物体70产生的n极或s极引起的磁场畸变的影响,即受到含铁(fe)物体70的磁场移动的影响,因此能够在第1-2线圈121b感应微电压和微电流。
91.而且,一个传感器100所具备的线圈120的一端可以与其他传感器100所具备的线圈120的一端连接,一个传感器100所具备的线圈120的另一端可以与其他传感器100所具备的线圈120的另一端连接。由此,能够以相同的信号将一个传感器100的导线和其他传感器100的导线连接。
92.具体地,在某个传感器100所具备的芯110和线圈120(第1-1芯111a和第1-1线圈121a)及其他传感器100所具备的芯110和线圈120(第1-2芯111b和第1-2线圈121b)中生成
感应磁场的情况下,在一个传感器100所具备的线圈120中生成微电流和微电压,从而能够形成正极和负极,在其他传感器100所具备的线圈120中也同样会生成微电流和微电压,从而能够形成正极和负极。此时,能够将一个传感器100所具备的线圈120的正极与其他传感器100所具备的线圈120的正极连接,能够将一个传感器100所具备的线圈120的负极与其他传感器100所具备的线圈120的负极连接。
93.通过这种相同信号的连接,如上所述,在含铁(fe)物体70的无极性部位通过一个传感器100时,即使在一个传感器100所具备的线圈120中的电流及电压的生成中断,其他传感器100所具备的线圈120中仍生成电流及电压,传感器模块10能够持续且正常地工作。
94.阻抗匹配部20与分别连接于多个线圈120的导线连接,能够执行阻抗匹配。阻抗匹配部20减少由从各个传感器100的两端传递的信号(微电流或微电压)间的阻抗差引起的反射,减少信号的损失,从而能够使信号传递效率最大化。而且,放大部30包括用于将传递来的信号放大的放大电路,能够将从阻抗匹配部20传递来的信号放大并传递给第一控制部41。
95.第一控制部41对放大的信号的波形进行分析,能够判断是含铁(fe)物体70发生了位移还是传感器模块10自身发生了位移。
96.第一控制部41能够通过微机或fpga等信号处理模块实现,可以应用软件算法(sw算法)。sw算法能够根据传感器100自身发生位移时的信号模式(signal pattern)的信息与含铁(fe)物体70移动时的信号模式的信息不同,判断发生位移的主体是含铁(fe)物体70、还是传感器模块10所包含的传感器100自身、或者是两者皆是。
97.具体地,如上所述,传感器100还对微磁场反应,因此在传感器100自身发生位移的情况下,传感器100在除了受到由于含铁(fe)物体70之间发生相对位移而产生的磁场变化的影响之外,还受到地球的磁场或周围其他物体70的磁场等变化的影响的情况下,形成信号模式,而另一方面,在含铁(fe)物体70发生位移的情况下,传感器100只受到由于与含铁(fe)物体70之间发生相对位移而产生的磁场变化的影响,能够在各个情况下形成不同的信号模式。而且,根据相同的原理,在含铁(fe)物体70与传感器100同时发生位移的情况下,能够形成其他不同的信号模式。
98.如上所述,在各个情况下,形成不同的信号模式,在各个情况下形成的信号模式被存储于第一控制部41,能够形成参考数据(reference data)。在此,能够实验性地导出存储于第一控制部41的参考数据中的信号模式。第一控制部41将从放大部30传递的信号模式与第一控制部41的参考数据内的信号模式进行比较判断来分析类似度等,从而能够判断含铁(fe)物体70是否发生位移或者传感器100是否发生位移。
99.第二控制部42从第一控制部41接收判断含铁(fe)物体70是否发生位移或传感器100是否发生位移的信息及针对信号模式波形的数据,能够分析发生了位移的主体的实际位移路径。第二控制部42能够通过微机或fpga等信号处理模块来实现,能够应用软件算法(sw算法)。
100.具体地,针对含铁(fe)物体70发生位移的信号模式、针对传感器100发生位移的信号模式、或者针对含铁(fe)物体70和传感器100同时发生位移的信号模式能够分别被存储于第二控制部42形成参考数据(reference data)。在此,能够实验性地导出存储于第二控制部42的参考数据的信号模式。
101.第二控制部42首先根据从第一控制部41传递的信息确定位移发生主体,从第二控制部42的参考数据选择与位移发生主体相关的数据类型之后,对从第一控制部41传递的信号模式的波形与第二控制部42的参考数据内的信号模式进行比较判断来分析类似度等,从而能够执行基于含铁(fe)物体70发生位移的坐标变化或基于传感器模块10发生位移的坐标变化等。
102.虽然在本发明的实施例中说明了第一控制部41和第二控制部42依次连接的情况,但不限于此,第一控制部41和第二控制部42可以是并行或相互独立的结构。
103.即,如上所述,第一控制部41除了将信号模式分离来确定物体70以外,还能够判断物体70是否发生位移或传感器模块10是否发生位移,第二控制部42分析物体70的移动路径和移动速度等的同时,能够分析传感器模块10的移动路径。
104.接下来,说明多个传感器100分别以放射状配置的情况。在图8和图10中,用双点划线表示的各个区域可以是与各个区域对应的各个传感器100的可测定区域(范围)。
105.在图8和图10中,为了便于理解,稍微缩小表示了各个传感器100的可测定区域,但不限于此,各个传感器100的可测定区域可以形成得更大。而且,在图10中,为了便于理解,省略了导线的连接等,只示出了传感器100的配置。
106.如图8~图10所示,多个传感器100分别以放射状配置。具体地,多个传感器100中的第3-1传感器103和第3-2传感器104能够以放射状形成。(虽然还存在形成放射状的其余传感器100,但是为了便于说明,只对第3-1传感器103和第3-2传感器104赋予符号并进行。)
107.如上所述,在多个传感器10分别以放射状配置的情况下,多个传感器100的各自的可测定区域相邻形成或者交叉形成,能够显著提高通过本发明的无极性校正及位移测定装置检测的对物体的检测效率。尤其,如图10所示,在多个传感器100分别以三维放射状配置的情况下,基于多个传感器100的可测定区域能够形成为球形,由此,如上所述,能够获得如下效果:不仅检测效率增大,而且无论物体向xyz轴的哪个方向移动,对物体的检测都很容易。而且,在分别单独配置单个传感器100的情况下,可能不容易进行考虑传感器100的可测定区域的配置设计,但是在将多个传感器100以放射状配置并利用如上所述形成的本发明的无极性校正及位移测定装置的情况下,形成如圆筒形或球形等的可测定区域,从而容易运算可测定区域,能够容易进行对物体的检测区域的设计。
108.在图8~图10中,在含铁(fe)物体70从图中的左侧朝向右侧以靠近传感器100的方式移动的情况下,在芯110中瞬间产生磁场变化,由此能够在线圈120感应生成微电压和微电流。此时,在含铁(fe)物体70的n极和s极转换的部位、即无极性部位通过第3-1芯113a的情况下,通过第3-1传感器103所具备的第3-1芯113a和第3-1线圈123a感应的电压和电流的生成有可能会中断。在此,不仅是磁力线由于无极性部位而完全不会给第3-1芯113a和第3-1线圈123a带来影响的情况,即使磁力线给第3-1芯113a和第3-1线圈123a带来部分影响,也由于靠近无极性部位时,磁通密度显著减少,感应电压和电流的生成有可能会中断。
109.另一方面,在同一时刻,第3-2传感器104所具备的第3-2芯113b和第3-2线圈123b受到由含铁(fe)物体70产生的n极或s极引起的磁场畸变的影响,即受到含铁(fe)物体70的磁场移动的影响,因此能够在第3-2线圈123b感应出微电压和微电流。
110.而且,一个传感器100所具备的线圈120的一端可以与其他传感器100所具备的线圈120的一端连接,一个传感器100所具备的线圈120的另一端可以与其他传感器100所具备
的线圈120的另一端连接。由此,能够以相同的信号将一个传感器100的导线与其他传感器100的导线连接。
111.具体地,在某个传感器100所具备的芯110和线圈120(第3-1芯113a和第3-1线圈123a)及其他传感器100所具备的芯110和线圈120(第3-2芯113b和第3-2线圈123b)生成感应磁场的情况下,在一个传感器100所具备的线圈120中生成微电流和微电压而能够形成正极和负极,在其他传感器100所具备的线圈120中也同样生成微电流和微电压而能够形成正极和负极。此时,可以将一个传感器100所具备的线圈120的正极与其他传感器100所具备的线圈120的正极连接,将一个传感器100所具备的线圈120的负极与其他传感器100所具备的线圈120的负极连接。
112.通过这种相同信号的连接,如上所述,在含铁(fe)物体70的无极性部位通过一个传感器100时,即使一个传感器100所具备的线圈120中的电流及电压的生成中断,在其他传感器100所具备的线圈120中仍生成电流及电压,传感器模块10能够持续且正常地工作。
113.其余的针对阻抗匹配部20、放大部30、第一控制部41及第二控制部42的事项与上述的多个传感器100分别并列配置的情况下的针对阻抗匹配部20、放大部30、第一控制部41及第二控制部42的事项相同。
114.如图5和图6所示,传感器100所具备的多个线圈120能够分别直列配置。即,在传感器模块10所具备的传感器100中,多个线圈120分别直列配置,一个芯110可以与其他芯110分开形成。具体地,在一个外壳130上,第2-1线圈122a和第2-2线圈122b可以直列形成,可以与之对应地形成第2-1芯112a和第2-2芯112b。在此,在传感器模块10中,可以形成至少一个以上的传感器100。
115.如图5、图6及图7所示,含铁(fe)物体70从图中的左侧向右侧以靠近传感器100的方式移动的情况下,在芯110中瞬间产生磁场变化,由此能够在线圈120感应生成微电压和微电流。此时,在含铁(fe)物体70的n极和s极转换的部位、即无极性部位(图7中用a表示)通过第2-1芯112a的情况下,通过第2-1芯112a和第2-1线圈122a感应的电压和电流的生成有可能会中断。在此,不仅是磁力线由于无极性部位而完全不会给第2-1芯112a和第2-1线圈122a带来影响的情况,如图7所示,即使磁力线给第2-1芯112a和第2-1线圈122a带来部分影响,也由于靠近无极性部位时,磁通密度显著减少,感应电压和电流的生成有可能会中断。
116.另一方面,在同一时刻,第2-2芯112b和第2-2线圈122b受到由含铁(fe)物体70产生的基于n极或s极的磁场畸变的影响,即受到含铁(fe)物体70的磁场移动的影响,因此能够在第2-2线圈122b感应出微电压和微电流。
117.而且,多个线圈120中的一个线圈120的一端可以与其他线圈120的一端连接,一个线圈120的另一端可以与其他线圈120的另一端连接。由此,可以以相同信号来将一个线圈120的导线与其他线圈120的导线连接。
118.具体地,在某个线圈120(第2-1线圈122a)及其他线圈120(第2-2线圈122b)中生成感应磁场的情况下,在一个线圈120中生成微电流和微电压而能够形成正极和负极,在其他线圈120中也同样生成微电流和微电压而能够生成正极和负极。此时,可以将一个线圈120的正极与其他线圈120的正极连接,将一个线圈120的负极与其他线圈120的负极连接。
119.通过这种相同信号的连接,如上所述,在含铁(fe)物体70的无极性部位通过一个传感器100时,即使一个传感器100所具备的线圈120中的电流及电压的生成中断,其他传感
器100所具备的线圈120中仍生成电流及电压,从而传感器模块10能够持续且正常地工作。
120.其余的针对阻抗匹配部20、放大部30、第一控制部41及第二控制部42的事项与上述的多个传感器100分别并列配置的情况下的针对阻抗匹配部20、放大部30、第一控制部41及第二控制部42的事项相同。
121.在本发明的实施例中,虽然将在传感器模块10中各个传感器100并列配置的事项及在传感器100中线圈120直列配置的事项分开进行了说明,但是在一个传感器100中线圈120直列配置的传感器100可以形成有多个且各个传感器100并列配置,此时传感器模块10可以形成为,对于各个传感器100,各个线圈120的位置彼此不同,以防止如上所述对含铁(fe)物体70的无极性部位的影响。在这种情况下,也同样能够适用上述的结构和原理。
122.图11和图12是表示物体70通过基于本发明的第一实施例的传感器100的情况下的信号模式的图表。具体地,图11的(a)是形成单个基于本发明的第一实施例的传感器100,传感器100的长度方向轴相对于地面处于竖直方向的情况的图表,图11的(b)是基于本发明的第一实施例的传感器100并列配置,传感器100的长度方向轴相对于地面处于竖直方向的情况的图表。而且,图12的(a)是形成单个基于本发明的第一实施例的传感器100,传感器100的长度方向轴相对于地面处于水平方向的情况的图表,图12的(b)是基于本发明的第一实施例的传感器100并列配置,传感器100的长度方向轴相对于地面处于水平方向的情况的图表。
123.如图11和图12所示,能够确认如下内容:在利用本发明的金属探测系统的情况下,与传感器100的长度方向轴相对于地面以竖直方向或水平方向形成无关地,能够容易执行利用传感器100的物体70的检测。而且,由利用单个传感器100的情况与将多个传感器100并列配置利用的情况的比较可知,与含铁(fe)物体70的无极性部位无关地,能够正常且连续地测定含铁(fe)物体70的位移发生。
124.通过如上所述的结构,能够检测含铁物体70的微磁场及磁通量的变化,能够以超低电力检测含铁物体70的位置、位移等。另外,如上所述,即使产生物体70的磁场减弱的范围、即无极性范围,也能够通过相邻的其他传感器100或线圈120来进行含铁物体70的磁场检测,传感器模块10能够正常且持续地工作。
125.另外,如上所述,能够将相对于地面的传感器100的设置方向等造成的其他影响最小化,能够与传感器模块10的配置等无关地进行检测及测定。另外,在配置多个传感器模块10来形成本发明的金属探测系统的情况下,能够判断并利用针对含铁物体70的移动路径、移动速度、磁通密度等的信息。
126.而且,本发明的金属探测系统,能够如上所述检测含铁物体的微磁场及磁通量的变化,因此能够与空气、土壤、水等的影响无关地发挥相同的性能。
127.上述的本发明的说明只是为了进行例示,本领域技术人员能够理解在不改变本发明的技术思想或必要技术特征的情况下,可以容易地变形为其他具体方式。因此,应理解为,以上记载的实施例在所有方面都是例示的,并不是限定的。例如,以独立型说明的各结构要素也可以分散实施,同样以分散式进行说明的结构要素也可以以组合的形式实施。
128.本发明的范围由权利要求书表示,应解释为能够由权利要求书的意思及范围、等效的概念能够导出的所有的变更或变形的方式均被包含于本发明的范围。
129.附图标记说明
130.10:传感器模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:第一传感器模块
131.12:第二传感器模块
ꢀꢀꢀꢀꢀꢀꢀꢀ
13:第三传感器模块
132.20:阻抗匹配部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30:放大部
133.41:第一控制部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42:第二控制部
134.50:输出部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60:摄像部
135.70:物体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71:第一物体
136.72:第二物体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
73:第三物体
137.74:第四物体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
75:第五物体
138.100:传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101:第1-1传感器
139.102:第1-2传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103:第3-1传感器
140.104:第3-2传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110:芯
141.111a:第1-1芯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111b:第1-2芯
142.112a:第2-1芯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112b:第2-2芯
143.113a:第3-1芯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113b:第3-2芯
144.120:线圈
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121a:第1-1线圈
145.121b:第1-2线圈
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122a:第2-1线圈
146.122b:第2-2线圈
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123a:第3-1线圈
147.123b:第3-2线圈
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130:外壳
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1