控制装置和程序的制作方法
1.本公开涉及一种控制装置和程序。
背景技术:
2.以往已知有具有感应电动机的机床。感应电动机例如根据其比较广的低输出特性而被使用于主轴的旋转。
3.另外,由于主轴的机械摩擦大,因此有时在感应电动机无负载启动时会出现比较大的发热。另外,由于主轴的机械摩擦大,因此有时无法进行按照感应电动机的输出规格的加工。为了检测这样的状态,例如提出了一种检查马达的劣化状态的机床(例如,参照专利文献1)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2016-200523号公报
技术实现要素:
7.发明要解决的问题
8.在专利文献1所记载的机床中,在切断了向主轴马达的动力之后,测量通过惯性而旋转的马达直到停止为止的时间。另外,在专利文献1所记载的机床中,判别所测量出的时间是否偏离预先决定的阈值的时间间隔。由此,能够容易地检测马达的劣化。特别是,能够容易地输出感应电动机中的机械损耗的状况是有用的。
9.用于解决问题的方案
10.(1)本公开涉及一种控制装置,对感应电动机进行控制,所述控制装置具备:电力切断部,其用于将向所述感应电动机的电力供给切断;速度获取部,其获取所述感应电动机的旋转速度;加速度计算部,其基于所获取到的旋转速度来计算加速度;惯性矩获取部,其获取所述感应电动机的主轴的惯性矩;机械损耗计算部,其基于所获取到的旋转速度、所计算出的加速度以及所获取到的惯性矩,来计算所述感应电动机的机械损耗;以及输出部,其输出所计算出的机械损耗。
11.(2)另外,本公开涉及一种程序,使计算机作为对感应电动机进行控制的控制装置而发挥功能,所述程序使所述计算机作为以下各部发挥功能:电力切断部,其用于将向所述感应电动机的电力供给切断;速度获取部,其获取所述感应电动机的旋转速度;加速度计算部,其基于所获取到的旋转速度来计算加速度;惯性矩获取部,其获取所述感应电动机的主轴的惯性矩;机械损耗计算部,其基于所获取到的旋转速度、所计算出的加速度以及所获取到的惯性矩,来计算所述感应电动机的机械损耗;以及输出部,其输出所计算出的机械损耗。
12.发明的效果
13.根据本公开,能够提供一种能够容易地输出感应电动机中的机械损耗的状况的控
制装置和程序。
附图说明
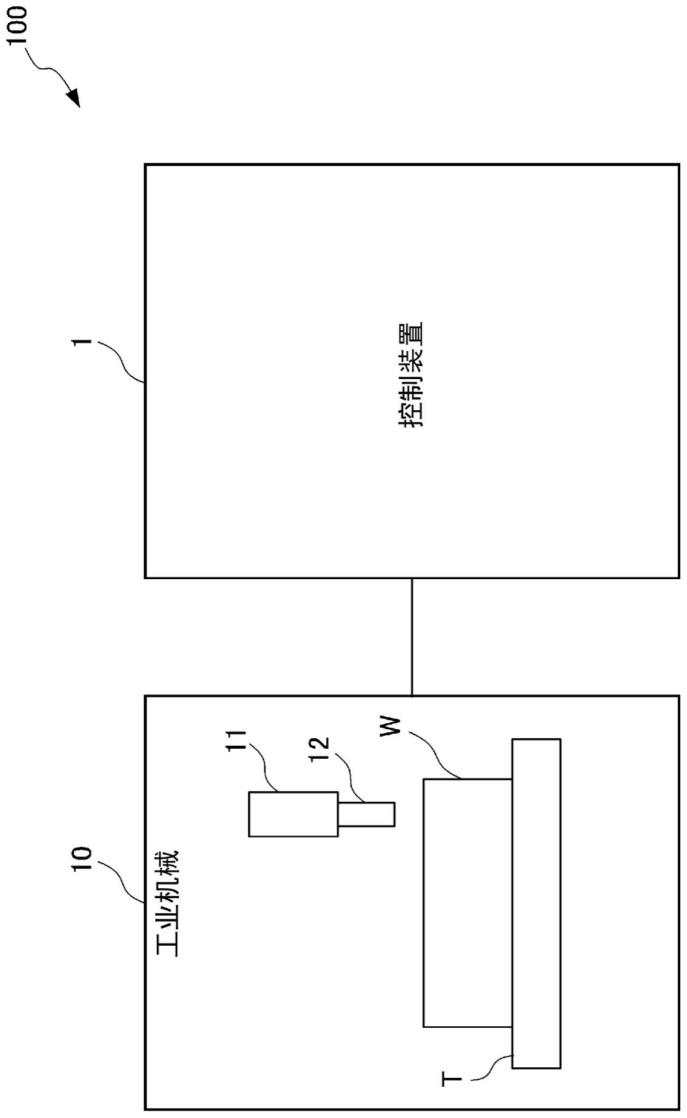
14.图1是示出包括本公开的一个实施方式所涉及的控制装置的控制系统的概要结构图。
15.图2是示出由一个实施方式的控制装置控制的感应电动机的输入与输出的关系的示意图。
16.图3是示出一个实施方式的控制装置的结构的框图。
17.图4是示出由一个实施方式的控制装置的速度获取部获取到的感应电动机的旋转速度与时刻的关系的曲线图。
18.图5是示出由一个实施方式的控制装置的加速度计算部计算出的感应电动机的加速度与时刻的关系的曲线图。
19.图6是示出由一个实施方式的控制装置的输出部输出的旋转速度与机械损耗的关系的一例的曲线图。
20.图7是示出由一个实施方式的控制装置的输出部输出的旋转速度与机械损耗的关系的一例的曲线图。
21.图8是示出由一个实施方式的控制装置的输出部输出的旋转速度与机械损耗的关系的一例的曲线图。
22.图9是示出一个实施方式的控制装置的动作的流程的流程图。
具体实施方式
23.下面,参照图1至图9来对本公开的一个实施方式所涉及的控制装置1和程序进行说明。
24.在说明本实施方式的控制装置1和程序之前,对包括控制装置1的控制系统100的结构进行说明。
25.例如,如图1所示,控制系统100具备工业机械10和控制装置1。控制系统100例如是按照预先决定的加工程序来对工件w进行加工的系统。
26.工业机械10例如是机床。工业机械10对载置于载置台t的工件w进行加工。工业机械10具备感应电动机11和工具12。此外,工业机械10是指包括例如机床、工业用机器人、服务用机器人、锻压机械以及注射成型机这样的各种机械的机械。
27.感应电动机11例如是驱动主轴(未图示)的电动机。感应电动机11在通电时通过产生旋转磁场来使主轴绕轴心旋转。另一方面,感应电动机11在电源切断后通过惯性而使主轴绕轴心旋转直到该感应电动机11停止(下面将电源切断后的旋转也称为“自由转动”)。
28.工具12例如是实际对工件w进行去除加工的器具。工具12被配置于主轴。工具12例如被安装于感应电动机11的主轴。而且,工具12利用感应电动机11的转矩来对工件w进行加工。
29.控制装置1是控制工业机械10的装置。控制装置1例如是对感应电动机11的动作进行伺服控制的装置。控制装置1通过控制感应电动机11的动作(旋转速度),来将工件w加工为期望的形状。
30.接着,更详细地说明感应电动机11的机械损耗的计算方法。
31.例如,如图2所示,感应电动机11针对电力的输入(供给)而输出动力。此时,感应电动机11中的损耗能够通过输入与输出之差来求出。即,能够通过(损耗)=(输入)-(输出)来求出。
32.而且,损耗能够通过铜损、铁损以及机械损耗之和来求出。即,通过(损耗)=(铜损)+(铁损)+(机械损耗)来求出。
33.在此,铜损是由电流产生的损耗。另外,铁损是由磁通变化产生的损耗。
34.感应电动机11不具有永磁体。因此,在感应电动机11中,通过电力切断,而铜损和铁损均变为0。即,在感应电动机11中,成为(损耗)=(机械损耗),且成为(机械损耗)=-(输出)。而且,通过动力切断从而只因机械损耗而减速停止时的某区间中的平均损耗p[w]使用主轴的惯性矩j[kgm2]表现为
[0035]
[数1]
[0036][0037]
在此,n1(1/min)是上述某区间的开始时刻t1(sec)时的开始速度。另外,n2是上述某区间的结束时刻t2(sec)时的结束速度。
[0038]
另外,当使用减速停止时的某角速度ω[rad/s]下的角加速度a[rad/s2]时,该角速度ω[rad/s]下的机械损耗l[w]能够通过计算
[0039]
l=j
·a·
ω
[0040]
来求出。
[0041]
接着,对本实施方式的控制装置1和程序进行说明。
[0042]
例如,如图3所示,本实施方式所涉及的控制装置1具备电力切断部101、速度获取部102、加速度计算部103、惯性矩获取部107、机械损耗计算部104、检测部105以及输出部106。
[0043]
电力切断部101例如通过cpu进行动作来实现。电力切断部101用于将向感应电动机11的电力供给切断。电力切断部101例如在规定的定时将从电源部(未图示)向感应电动机11的电力供给切断。具体地说,电力切断部101通过对工业机械10发送用于将向感应电动机11的电力供给切断的指令,来使工业机械10切断向感应电动机11的电力供给。
[0044]
速度获取部102例如通过cpu进行动作来实现。速度获取部102获取感应电动机11的旋转速度。速度获取部102例如通过从设置于感应电动机11的传感器(未图示)获取表示角速度的输出信号,从而获取感应电动机11的旋转速度。速度获取部102例如获取如图4所示的在时刻t0切断了电力时的感应电动机11的旋转速度。
[0045]
加速度计算部103例如通过cpu进行动作来实现。加速度计算部103基于所获取到的旋转速度来计算加速度。加速度计算部103例如通过对所获取到的旋转速度进行微分来计算加速度。加速度计算部103例如计算如图5所示的在时刻t0切断了电力时的由感应电动机11的机械损耗产生的加速度。
[0046]
惯性矩获取部107例如通过cpu进行动作来实现。惯性矩获取部107自外部获取感应电动机11的主轴的惯性矩。
[0047]
机械损耗计算部104例如通过cpu进行动作来实现。机械损耗计算部104基于所获取到的旋转速度、所计算出的加速度以及所获取到的惯性矩,来计算感应电动机11的机械损耗。机械损耗计算部104例如计算如图6所示的机械损耗与旋转速度(频率)的关系。
[0048]
此外,在认为产生了感应电动机11的摩擦等变化的突发现象的情况下,机械损耗计算部104计算出如图7所示的机械损耗与旋转速度(频率)的关系。在本例中,机械损耗计算部104在旋转速度v1下计算出与其它的旋转速度相比较高的机械损耗的变化率。即,关于相对于旋转速度的增加而言的机械损耗的增加率,机械损耗计算部104在旋转速度v1下计算出比较高的机械损耗的增加率。
[0049]
另外,在是感应电动机11的轴承(未图示)的润滑不适当的状态的情况下,机械损耗计算部104计算出如图8所示的机械损耗与旋转速度(频率)的关系。在本例中,机械损耗计算部104在旋转速度v2下计算出与其它的旋转速度相比较高的机械损耗的变化率。即,关于相对于旋转速度的增加而言的机械损耗的增加率,机械损耗计算部104在旋转速度v2下计算出比较高的机械损耗的增加率。
[0050]
检测部105例如通过cpu进行动作来实现。检测部105针对所计算出的机械损耗,检测相对于速度的增加而言的机械损耗的增加率变为大于规定值的变化。另外,检测部105检测使得增加率变为大于规定值的旋转速度。例如,在图6的例子中,检测部105不检测变为大于规定值的增加率的变化。例如,在图7的例子中,检测部105将旋转速度v1下的机械损耗的增加检测为变为大于规定值的增加率的变化。例如,在图8的例子中,检测部105将旋转速度v2下的机械损耗的增加检测为变为大于规定值的增加率的变化。
[0051]
输出部106例如通过cpu进行动作来实现。输出部106输出所计算出的机械损耗。输出部106例如将由机械损耗计算部104计算出的旋转速度(频率)与机械损耗的关系作为显示于显示器等显示装置(未图示)的信号进行输出。另外,输出部106输出表示检测出变为大于规定值的变化的信号。输出部106例如将表示检测出变为大于规定值的变化的信号作为显示、声音等信号进行输出。另外,输出部106输出表示所检测出的旋转速度的信号。输出部106例如输出表示所检测出的旋转速度v1的信号。另外,输出部106例如输出表示所检测出的旋转速度v2的信号。
[0052]
接着,对控制装置1的动作进行说明。
[0053]
首先,电力切断部101将向感应电动机11的电力供给切断(步骤s1)。接着,速度获取部102经时地获取感应电动机11的旋转速度(步骤s2)。接着,加速度计算部103基于所获取到的旋转速度来计算加速度(步骤s3)。另外,惯性矩获取部107获取感应电动机11的主轴的惯性矩(步骤s4)。接着,机械损耗计算部104基于所获取到的旋转速度、所计算出的加速度以及所获取到的惯性矩,来计算机械损耗(步骤s5)。
[0054]
接着,检测部105检测在旋转速度的增加与机械损耗的关系中形成为规定值以上的增加率的旋转速度(步骤s6)。在检测出规定值以上的增加率的情况下(步骤s6:“是”),处理进入步骤s7。另一方面,在未检测出规定值以上的增加率的情况下(步骤s6:“否”),检测部105不输出信号。然后,处理进入步骤s8。
[0055]
在步骤s7中,检测部105将表示检测出的信号发送到输出部106。另外,检测部105将表示所检测出的旋转速度的信号发送到输出部106。然后,处理进入步骤s8。
[0056]
在步骤s8中,输出部106输出所计算出的机械损耗。另外,输出部106在接收到来自
检测部105的信号的情况下,输出表示检测出规定值以上的增加率的信号和表示所检测出的旋转速度的信号。
[0057]
接着,对程序进行说明。
[0058]
控制装置1中包括的各结构能够分别通过硬件、软件或它们的组合来实现。在此,通过软件实现是指通过计算机读取并执行程序来实现。
[0059]
程序能够使用各种类型的非暂态计算机可读介质(non-transitory computer readable medium)来保存并提供给计算机。非暂态计算机可读介质包括各种类型的有实体的记录介质(tangible storage medium)。非暂态计算机可读介质的例子包括磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、cd-rom(read only memory:只读存储器)、cd-r、cd-r/w、半导体存储器(例如掩膜rom、prom(programmable rom:可编程只读存储器)、eprom(erasable prom:可擦可编程只读存储器)、快闪rom、ram(random access memory:随机存取存储器))。另外,也可以通过各种类型的暂态计算机可读介质(transitory computer readable medium)来向计算机供给显示程序。暂态计算机可读介质的例子包括电信号、光信号以及电磁波。暂态计算机可读介质能够经由电线和光纤等有线通信路径、或无线通信路径来向计算机供给程序。
[0060]
根据上面的一个实施方式所涉及的控制装置1和程序,能够起到下面的效果。
[0061]
(1)一种控制装置1,对具有感应电动机11的工业机械10进行控制,该控制装置1具备:电力切断部101,其用于将向感应电动机11的电力供给切断;速度获取部102,其获取感应电动机11的旋转速度;加速度计算部103,其基于所获取到的旋转速度来计算加速度;惯性矩获取部107,其获取感应电动机11的主轴的惯性矩;机械损耗计算部104,其基于所获取到的旋转速度、所计算出的加速度以及所获取到的惯性矩,来计算感应电动机11的机械损耗;以及输出部106,其输出所计算出的机械损耗。由此,能够容易地输出感应电动机11中的机械损耗的状况。因而,在感应电动机11的无负载动作时的振动、发热大的情况下,能够容易地判别主轴m的机械异常的有无。另外,在主轴m存在异常的情况下,能够区分主要原因从而容易地进行分析。
[0062]
(2)控制装置1还具备检测部105,该检测部105针对所计算出的机械损耗,检测相对于旋转速度的增加而言的机械损耗的增加率变为大于规定值的变化,输出部106输出表示检测出变为大于规定值的变化的信号。由此,能够将感应电动机11的机械损耗的异常与所计算出的机械损耗一起输出。
[0063]
(3)检测部105检测使得机械损耗的增加率变为大于规定值的旋转速度,输出部106输出表示所检测出的旋转速度的信号。由此,也能够输出异常的详情。因而,针对所设想的不良状况的种类,能够提供能够预测的信息。
[0064]
上面对本公开的控制装置和程序的优选的一个实施方式进行了说明,但本公开不限于上述的实施方式,能够适当地进行变更。
[0065]
例如,在上述实施方式中,设为速度获取部102在电力供给切断后进行动作,但不限于此。速度获取部102也可以始终获取感应电动机11的旋转速度。
[0066]
另外,在上述实施方式中,也可以还具备主要原因输出部(未图示),该主要原因输出部基于机械损耗的增加率,输出所设想的异常的主要原因。主要原因输出部例如也可以在图7所示那样的情况下将表示能够认为产生了摩擦等变化的突发现象的信号发送到输出
部106。另外,例如在图8所示那样的情况下,主要原因输出部也可以将表示是轴承的润滑不适当的状态从而在高速区域中损耗增加的信号发送到输出部106。输出部106也可以输出从主要原因输出部获取到的信号。
[0067]
另外,在上述实施方式中,也可以是,检测部105以区域的形式检测使得机械损耗的增加率变为大于规定值的旋转速度。输出部106也可以输出表示所检测出的旋转速度的区域的信号。
[0068]
附图标记说明
[0069]
1:控制装置;10:工业机械;11:感应电动机;12:工具;101:电力切断部;102:速度获取部;103:加速度计算部;104:机械损耗计算部;105:检测部;106:输出部;107:惯性矩获取部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1