磁电阻传感器及其制造方法
1.本发明大体涉及磁电阻传感器及其制造方法。
背景技术:
2.磁电阻(magnetoresistance or magnetoresistive,mr)传感器广泛使用于日常应用中,其中磁电阻值是一个重要的指标。磁电阻传感器是一种非常小的被设计为感应外加磁场的部件。由于不需要物理接触或电接触,该传感器可以在相对较大的气隙中对磁畴进行直接、非侵入式的感应和成像。为了使嵌入成为可能,磁电阻传感器被设计得很小,并且以很少的功率运行。
3.磁电阻是材料在外加磁场中改变其电阻值的趋势。电阻可以根据场线相对于电流方向的方向增加或减少。
4.磁电阻传感器有着广泛的应用,其中大部分应用都是围绕检测物体的位置或存在而展开的。可以将磁电阻传感器嵌入医疗柜抽屉中,以识别其是否处于打开或关闭位置。跑步机可以使用磁电阻传感器作为一种失能开关,如果安全钥匙被取下,跑步机就会停用。在信息存储应用中,可以使用对低(杂散)磁场极为敏感的mr读取传感器从磁性硬盘中检索数据。
5.受对高灵敏度、低能耗、高温工作、低成本和现成可用的mr传感器的巨大需求的促使,研究人员一直在研究制造mr传感器的各种方法和合适材料。
6.目前市场上的mr传感器往往体积庞大,当缩小到纳米级时,存在需要解决空间分辨率的问题。对于传统的基于3d材料的巨磁电阻(giant mr,gmr)或隧道磁电阻(tunnelling mr,tmr)自旋阀传感器,缩小尺寸将导致热磁噪声和自旋转矩不稳定,限制空间分辨率和灵敏度。尽管超导量子干涉器件(superconducting quantum interference device,squid)可以提供优异的磁灵敏度,但由于其空间分辨率和低温操作差,对其的利用受到限制。另一方面,虽然磁力显微镜(magnetic force microscopy,mfm)和自旋极化扫描隧道显微镜(spin-polarized scanning tunnelling microscopy,sp-stm)技术可以提供高空间分辨率,但这些技术由于使用了磁头而具有侵入性。
7.希望克服或改善至少一个上述问题,或至少提供一个有用的替代方案。
技术实现要素:
8.本发明提供一种磁电阻传感器,包括:
9.a)具有波纹和/或阶梯式表面的衬底;
10.b)连续石墨烯层,被布置在该衬底的波纹和/或阶梯式表面上;和
11.c)与该石墨烯层接触的至少两个导电元件;
12.其中该石墨烯层基本上与该衬底的波纹和/或阶梯式表面一致。
13.有利地,通过使石墨烯层与波纹和/或阶梯式表面一致,在高达约400k的情况下可以获得稳定的磁电阻。在300k和400k、垂直磁场为9.0t时,也可以获得约2000%的磁电阻性
能。磁电阻传感器是稳定的,并能够在至少10μt的宽磁场范围内工作。波纹和/或阶梯式衬底也可以用作栅极介质层,并且栅极电压可以应用于调整石墨烯层的迁移率和载流子密度。
14.在一些实施方案中,该衬底的波纹和/或阶梯式表面包括至少一个波峰组成部分和一个波谷组成部分。
15.在其他实施方案中,该衬底的波纹和/或阶梯式表面包括至少两个波峰组成部分和两个波谷组成部分。
16.在一些实施方案中,该衬底的波纹和/或阶梯式表面选自楼梯结构、方波结构、三角波结构、正弦波结构或其组合。
17.在一些实施方案中,该波纹和/或阶梯式表面具有至少100nm的峰间距离。
18.在一些实施方案中,该波纹和/或阶梯式表面具有至少100nm的谷间距离。
19.在一些实施方案中,该波纹和/或阶梯式表面上的组成部分具有约5nm至约50nm的高度。
20.在一些实施方案中,该石墨烯层是单个石墨烯单原子层。
21.在一些实施方案中,该石墨烯层与该衬底的波纹和/或阶梯式表面接触。
22.在一些实施方案中,该至少两个导电元件独立地选自cr、au、ti、pd或其组合。
23.在一些实施方案中,该至少两个导电元件独立地具有约2nm至约150nm的厚度。
24.在一些实施方案中,该衬底选自二氧化硅、氮化硅、碳化硅、氮化硼、二硫化钼、二碲化钼、二硒化钨、二硫化钨和复合氧化物,例如钛酸锶。
25.本发明还提供了一种制造磁电阻传感器的方法,包括:
26.a)在衬底上形成波纹和/或阶梯式表面;
27.b)在该衬底的波纹表面上布置连续的石墨烯层;和
28.c)使至少两个导电元件与该石墨烯层接触;
29.其中,该石墨烯层基本上与该衬底的波纹和/或阶梯式表面一致。
30.有利地,该方法易于扩展。
31.在一些实施方案中,通过使用光刻和等离子体蚀刻、电子束光刻和等离子蚀刻或金属掩模和等离子蚀刻形成该衬底上的波纹和/或阶梯式表面。
32.在一些实施方案中,通过聚合物冲压或化学气相沉积(chemical vapour deposition,cvd)将该石墨烯层布置在该衬底的波纹和/或阶梯式表面上。
附图说明
33.现在将参考以下附图以非限制性示例的方式描述本发明的实施方案,附图中:
34.图1例示了不同波纹衬底的示意图;
35.图2示出了示例传感器的横截面图,以及该传感器的俯视图的光学显微照片;
36.图3示出了显示了示例传感器的外形的afm显微照片和高度剖面图;
37.图4是在300k时示例性传感器的磁电阻(%)与磁场(t)的曲线图;
38.图5是在400k时图4的传感器的磁电阻(%)与磁场(t)的曲线图;
39.图6例示了示例性传感器的表面外形特征及其相应的磁电阻(%)曲线图;
40.图7例示了具有阶梯式表面的示例性传感器的表面外形特征及其相应的磁电阻
(%)曲线图;
41.图8是在磁电阻传感器上形成电触点的过程的示意图;
42.图9例示了波纹表面及其相应间距的一些示例;
43.图10是制造磁电阻传感器的示例过程的流程图;
44.图11示出了根据某些实施方案的磁电阻传感器的三种替代器件配置;
45.图12示意性地描述了被布置为扫描探针磁强计一部分的磁电阻传感器;
46.图13例示了磁电阻传感器作为定位传感器或速度计的应用;
47.图14例示了磁电阻传感器在助听器或无线耳塞中的应用;和
48.图15例示了磁电阻传感器在无损裂纹检测中的应用。
具体实施方式
49.本发明以这样的理解为前提,即单层电子导电材料足以制作磁电阻传感器。例如,石墨烯,即排列在六角周期晶格中并且具有弱范德瓦尔斯层间相互作用的单层碳原子堆栈,可以是一种表现出大的mr值的电子材料。从根本上讲,原子薄型结构提供了最简单的系统。
50.就此而言,石墨烯mr传感器可用于制作具有纳米级分辨率的二维(two-dimensional,2d)磁性传感器。然而,目前的石墨烯mr传感器在单层石墨烯中表现出弱mr效应,而且在高载流子密度下表现出弱mr效应。就此而言,只有当载流子密度低至10
10-10
11
cm-2
时,才能观察到相对较大的mr。当载流体密度更高(~10
12
cm-2
)时,石墨烯的mr消失,这是从大量生产的工业规模石墨烯普遍获得的结果。发明人发现,通过提供使石墨烯可以在其上并且与其一致的波纹衬底,mr效应可以提高到5000%,这比先前报道的单层石墨烯器件在相同条件下的mr效应高一个数量级。此外,mr被证明对温度和环境掺杂(能够在石墨烯中诱发高载流子密度)具有鲁棒性。即使在10
12
cm-2
的高掺杂的情况下,mr仍维持在1000%以上。
51.因此,本发明提供了一种磁电阻传感器。该磁电阻传感器包括具有波纹和/或阶梯式表面的衬底。将石墨烯层布置在衬底的波纹表面上。石墨烯层优选为单层石墨烯。由于石墨烯的柔性,单层石墨烯堆叠在梯状衬底上会复制出与衬底类似的梯状形态。该石墨烯层可以是连续的石墨烯层,就此而言,石墨烯层是完整的,基本上覆盖了波纹表面。至少两个导电元件与石墨烯层接触。两个导电元件彼此隔开。石墨烯层基本上与衬底的波纹表面一致。就此而言,石墨烯层采用波纹状石墨烯结构。
52.如本文所使用的,石墨烯层是2d材料。2d材料也称为单层材料,其由单层原子组成。石墨烯是碳的同素异形体,其由排列在二维蜂窝状晶格中的单层原子组成。
53.图1例示了不同波纹表面的示意图,其从左到右示出了楼梯结构、方波结构、三角波结构和正弦波剖面。波纹衬底也可以是周期间隔的方形结构、三角形结构和气泡型结构。波纹和/或阶梯式表面可以是上述结构或轮廓的组合。
54.本文使用的“波纹(corrugated)”和“阶梯式(stepped)”是指表面的1d和/或2d的有序图案。波纹可以例如是一系列平行的脊和凹槽,而阶梯式可以例如是一系列平行的脊或凹槽。平行的脊和/或凹槽还可以是交替的。这与例如通过砂磨形成的随机粗糙或不平整的表面形成对比。衬底的波纹表面可以包括至少一个波峰组成部分和一个波谷组成部分。
替代地,衬底的波纹表面可以包括至少两个波峰组成部分和至少两个波谷组成部分。波纹表面具有至少100nm的峰间距离。在其他实施方案中,峰间距离为至少50nm、至少150nm、至少200nm、至少250nm或至少300nm。波纹表面可以具有至少100nm的谷间距离。在其他实施方案中,谷间距离为至少50nm、至少150nm、至少200nm、至少250nm或至少300nm。替代地,波纹表面上的组成部分可以通过至少100nm的间距分隔开。在其他实施方案中,间距为至少50nm、至少150nm、至少200nm、至少250nm或至少300nm。
55.该表面可以替代地为阶梯式表面。阶梯式表面可以包括至少一个波峰组成部分和一个波谷组成部分。波峰组成部分可以是第一阶梯,波谷组成部分可以是位置低于第一阶梯的第二阶梯。阶梯式表面具有至少100nm的峰谷距离。替代地,波纹表面上的组成部分可以通过至少100nm的间距分隔开。在其他实施方案中,间距为至少50nm、至少150nm、至少200nm、至少250nm或至少300nm。
56.如本文所使用的,“间距”与频率相关联,因此可以使用频率进行量化。就此而言,间距量化了组成部分在表面上的距离。图9示出了波纹表面及其相应间距的一些示例。
57.波纹表面上的组成部分可以具有约5nm至约50nm的高度。高度可以相对于表面上的另一组成部分。例如,波峰组成部分相对于波谷组成部分的高度可以为约5nm至约50nm。如果使用阶梯式结构,阶梯的高度可以相对于相邻阶梯。替代地,组成部分的高度可以相对于与波峰组成部分和波谷组成部分等距的平面。在其他实施方案中,高度为约10nm至约50nm、约15nm至约50nm、约20nm至约50nm、约25nm至约50nm、约30nm至约50nm或约40nm至约50nm。在其他实施方案中,高度为至少5nm、至少15nm、至少20nm、至少25nm、至少30nm、至少35nm、至少40nm、至少45nm或至少50nm。
58.发明人发现,与晶格结构(即由一个或多个重复单位晶格组成的开孔结构)相比,波纹表面更有利。相比之下,晶格结构只能将石墨烯的mr效应提高3倍。进一步地,由于难以大量生产石墨烯/晶格异质结构,这种使用晶格结构的方法在商业上不可行。此外,晶格结构不易进行设计和控制。波纹表面还进一步有利于随机表面粗糙度。这样的表面很难控制,就此而言,无法获得对其mr的良好控制以用在典型的磁电阻传感器中;即,灵敏度是必不可少且至关重要的。在此类器件中具有良好的稳定性和再现性很重要。
59.因此,在一些实施方案中,衬底具有波纹和/或阶梯式表面。就此而言,波纹和/或阶梯式表面形成为沿x和y方向延伸的2d阵列。这是有利的,因为大的表面积可以改善磁域的直接和非侵入性感应和成像。在一些实施方案中,衬底具有带状的波纹和/或阶梯式表面。就此而言,“带状”表面包括单个行或单个列的组成部分(1d阵列);即,组成部分不是以2d阵列或晶格排列的。这更为有利,因为它允许对表面/几何形状进行良好控制,以满足磁电阻传感器的严格要求。
60.衬底可以是二氧化硅、氮化硅、碳化硅、氮化硼、二硫化钼、二硒化钨、其他稳定的2d材料和薄膜半导体。顾名思义,层用作石墨烯层的衬底以与其相符,从而创建最终的波纹结构。
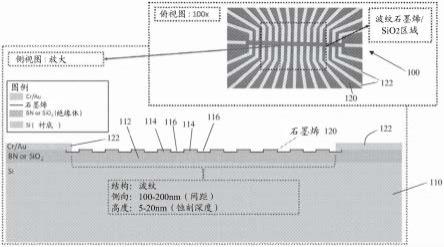
61.图2在顶部例示了示例性传感器100的顶部的光学显微照片。在图2的底部示出了传感器100的剖面示意图。传感器100包括硅衬底110,其上形成了氧化硅或氮化硼的波纹绝缘层112。波纹层112具有包括相互交错的多个棱114和凹槽116的表面结构。石墨烯层120形成在波纹结构上,并与波纹结构一致。在这种情况下,波纹结构形成为具有周期性蚀刻的方
波剖面。采用电接触垫122形式的导电元件以使这些导电元件也至少部分地接触石墨烯层120的方式被应用于绝缘层。导电元件可以由厚度分别为5nm和65nm的cr和au金属层制成。可以看出,石墨烯层120在绝缘层112的波纹表面上形成一个连续层。就此而言,石墨烯层的一部分与导电元件122的第一导电元件接触,而石墨烯层的另一部分与导电元件122的第二导电元件接触。
62.可以理解,图2的传感器100可以以如本领域已知的任何合适的方式封装。例如,一个或多个传感器100可以粘附在引线框架上,接触垫122可以通过引线接合与引线框架端子连接。然后将引线框架封装在塑料中,引线框架端子提供用于将传感器100连接到外部电路以进行读数和/或编程的装置。
63.图3例示了示例性传感器的外形特征。顶部的afm显微照片示出了平面氮化硼衬底和波纹氮化硼衬底上的1层石墨烯传感器的外形。在本示例中,衬底为氮化硼,蚀刻深度为1.5nm,间距为100nm。
64.如前所述,波纹石墨烯结构是通过在波纹衬底上布置至少单层石墨烯而制成的。因此,在一些实施方案中,石墨烯层与衬底的波纹和/或阶梯式表面接触。这允许柔性而非刚性的石墨烯层与波纹和/或阶梯式表面一致。在一些实施方案中,石墨烯层是单个石墨烯单原子层。
65.有利地,使石墨烯层与波纹表面一致增强了mr效应。
66.磁性元件是对引起mr效应的外部磁场作出响应的元件。虽然还有其他已知的方法,例如通过将石墨烯放置在氮化硼上来增加石墨烯的磁电阻,但由于难以大量生产这种异质结构,这些方法在商业上不可行。本发明是基于利用无序诱导mr效应来增加石墨烯中的磁电阻,无序诱导mr效应可以通过随机电阻网络模型和/或自洽有效介质理论来描述。这两种理论经计算在数学上是等价的。就此而言,石墨烯中大mr的物理起因是由载流子不均匀性诱导的电子空穴水坑(electron-hole puddles)的存在。在存在磁场的情况下,电子不会沿直线运动,而是会因水坑边界处的不连续性而强烈畸变,从而增强散射。因此,通过利用波纹和/或阶梯式表面引起石墨烯中的电荷无序,可以获得大的mr。
67.这与自旋取向引起的磁矩形成对比。例如,在tmr中,两个铁磁层由绝缘体薄层分隔开,由于两个铁磁性层之间的自旋依赖性电子隧穿,多层在垂直于薄膜方向的电阻根据铁磁薄层磁化的方向而变化。当两个铁磁电极的磁化方向相同时,两个铁磁电极之间通过绝缘体层的电子隧穿的可能性变大,从而导致更大的隧穿电流。
68.更有利地,这种波纹/阶梯式结构可以进行人工设计和控制,这与当前的cmos技术兼容。至少两个导电元件可以独立地选自cr、au、ti、pd或其组合。例如,导电元件的一种组合可以是5nm的cr层,上面覆盖45nm的au层,或者覆盖65nm的au层。另一种组合是2nm的cr层或ti层,上面覆盖100nm的au或ag。就此而言,导电元件可以由两个或更多相互接触的金属层组成。这些元件是导电的,因为它们具有能够将电传导向石墨烯层或远离石墨烯层的特性,因此充当用于将传感器连接到外部电路的电触点。这允许记录信号/输出。
69.在一些实施方案中,至少两个导电元件独立地具有约2nm至约150nm的厚度。在其他实施方案中,厚度为约2nm至约120nm、约5nm至约100nm、约10nm至约100nm、约20nm至约100nm、约30nm至约100nm、约40nm至约100nm、约50nm至约100nm、约60nm至约100nm或约70nm至约100nm。
70.导电元件(电极)的放置会影响测量的电阻r。由于磁电阻mr值定义为(δr*100/r)%,在施加外部磁场b时,r发生变化(δr),因此mr是b的函数。电极的放置能够影响传感器的空间分辨率和mr。
71.在一些实施方案中,电极间的间隔至少为约1μm。在其他实施方案中,间距至少为约1.5μm、约2μm、约4μm、约5μm、约7μm或者约10μm。
72.从本发明实施方案的传感器能获得的磁电阻的示例在图4中示出。图4例示了基于梯状氮化硼衬底上的1层石墨烯的传感器的磁电阻mr%根据具有不同外加栅极电压的外部磁场变化的曲线图。这些测量是在室温300k下进行的。
73.作为另一个示例,图5例示了基于梯状氮化硼衬底上的1层石墨烯的传感器的磁电阻(%)根据施加15v栅极电压的外部磁场相对于磁场(t)的变化。该测量是在400k的高温下进行的。
74.通过使用波纹衬底,磁电阻传感器的性能得到改善。例如,图6例示了(a)在平面sio2和波纹sio2上的单层石墨烯的afm图像,以及(b)在平面bn和波纹bn上的单层石墨烯的afm图像。图6中的c示出了在300k下平面和梯状sio2衬底上的石墨烯的磁电阻mr%随外部磁场的变化。下面的黑线是平面sio2上的石墨烯的mr,上面的红线是波纹sio2上的石墨烯的mr。图6中的d示出了在300k下平面和梯状bn衬底上的石墨烯的磁电阻mr%随外部磁场的变化。下面的黑线是平面bn上的石墨烯的mr,上面的红线是波纹bn上的石墨烯的mr。
75.图7例示了具有阶梯式表面的示例性传感器的afm图像及其相应的磁电阻(%)的曲线图。
76.波纹石墨烯结构的磁电阻比率由施加垂直磁场和不施加垂直磁场的石墨烯层的纵向电阻差决定。比率为(δr*100/r)%,其中r是材料在幅度为零的磁场中的电阻率,δr是一定幅度的磁场中的电阻率。(δr/r)取决于磁场b,即磁场b的大小和方向。
77.本发明实施方案的传感器可以具有约250%到约6000%的磁电阻比率。在其他实施方案中,磁电阻比率为约260%至约5900%、约270%至约5800%、约280%至约5700%、约290%至约5600%、或约300%至约5500%。
78.下表给出了本发明实施方案的磁电阻传感器的磁电阻比率的示例:
79.t平面sio2上的g梯状sio2上的g平面bn上的g梯状bn上的g300k100%300%400%2000%400k180%380%600%1600%
80.在其他示例中,示出了通过使石墨烯层与波纹表面一致,可以将mr效应提高至5000%。本文示出的mr对温度和环境掺杂(可能在石墨烯中诱发高载流子密度)具有鲁棒性。mr性能良好,即使在10
12
cm-2
的高掺杂水平下也能维持在1000%以上。例如,在300k的情况下,当垂直磁场为9.0t时,可以维持高达约2000%的mr性能,在400k的情况下,当垂直电场为9.0t时,可以维持高达约1750%的mr性能。进一步地,传感器具有高温操作稳定性,在约400k的情况下(典型的传感器工作温度)示出了高而稳定的磁电阻。传感器具有宽磁场范围检测,能够在10μt到无可测量上限的宽磁场范围内工作。
81.就此而言,本发明实施方案的传感器在存在9.0t磁场的情况下可以具有至少1000%的mr效应。传感器在存在至少10μt磁场的情况下可以具有mr效应。
82.这种传感器在助听器中非常适用,并可以作为tmr的替代传感器。这些传感器还可
two-dimensional materials by all-dry viscoelastic stamping)”,2d材料,第1卷第1号(2014),f.pizzocchero等人的“用于批量组装范德瓦尔斯异质结构的热拾取技术(the hot pick-up technique for batch assembly of van der waals heterostructures)”,自然通讯7,11894(2016)和c.r.dean等人的“用于高质量石墨烯电子器件的氮化硼基材(boron nitride substrates for high quality graphene electronics)”,自然纳米技术5,722-726(2010),上述文献均通过引用合并入本文。技术人员也会理解,可以使用其他石墨烯转移方法。
95.图8示出了如何将导电元件应用于石墨烯。在第一操作800中,衬底用抗蚀剂旋涂。在电子束光刻的情况下,抗蚀剂可以是电子束抗蚀剂(例如pmma或zep),在光刻的情况下,抗蚀剂可以是光致抗蚀剂(例如s1805或az1512)。在随后的操作810中,可通过电子束或光子束以所需图案(或所需图案的相反图案,这取决于抗蚀剂是否为正性抗蚀剂)辐照抗蚀剂。接下来,在820中,可以进行显影(冲洗)过程。该过程移除抗蚀剂的暴露区域(对于正性抗蚀剂)或未暴露区域(对于负性抗蚀剂)。
96.在光刻和显影后,样品在热蒸发器或电子束蒸发器中进行金属沉积830。为了形成电触点122,可以沉积厚度分别为5nm和65nm的铬连续层和金连续层。
97.最后,在840中,样品在吹干之前可以经历剥离过程(例如,在丙酮中)和ipa漂洗。
98.本发明的实施方案可以基于标准霍尔棒结构产生物理mr。物理mr是由洛伦兹力引起的电荷载流子的轨道运动引起的。技术人员将理解,该物理mr也可以与其他器件配置相结合,例如几何mr。该几何mr很大程度上取决于电流的边界条件。为了进一步使mr灵敏度增长,可以使用其他类型的器件配置,例如范德堡结构、磁盘结构和非凡磁电阻(extraordinary magnetoresistance,emr)结构,这些配置被包括在本发明的范围内。
99.例如,图11中的(a)示出了具有范德堡结构的传感器100a的示意图。传感器100a包括波纹和/或阶梯状石墨烯表面结构120,该石墨烯表面结构可以以与图2的传感器100相同的方式形成在衬底(未示出)上。从上面看,传感器100a通常为矩形。提供了多个电触点1122a至1122f与石墨烯表面结构120接触。例如,第一对触点1122e和1122f可以设置在表面结构120的第一相对侧上,用于通过被注入到触点1122e中并且从触点1122f流出(反之亦然)的dc电流i。一个或多个第二对触点1122a和1122b,或1122c和1122d可以设置在表面结构120的第二相对侧(例如,与第一相对侧正交)上,以测量触点1122a和1122b之间,或者1122c或1122d之间的压降v。
100.在如图11中的(b)所示的另一示例中,传感器100b通常可以是圆形或圆盘形。传感器100b包括波纹和/或阶梯状石墨烯表面结构120。提供了多个电触点1132a至1132d与石墨烯表面结构120接触。例如,第一对触点1132a和1132b可以设置在传感器100b的第一侧上,用于通过被注入到触点1132a中并且从触点1132b流出(反之亦然)的dc电流i。第二对触点1132c和1132d可以设置在传感器100b的与第一侧相对的第二侧上,用于测量触点1132c和1132d之间的电压v。
101.在如图11中的(c)所示的另一示例中,传感器100c通常可以为矩形。传感器100c包括波纹和/或阶梯状石墨烯表面结构120。提供了多个电触点1142a至1142e与石墨烯表面结构120接触。例如,第一对触点1142a和1142b可以设置在传感器100c的第一侧上,用于通过被注入到触点1142a中并从触点1142b流出(反之亦然)的dc电流i。第二对触点1142c和
1142d可以设置在传感器100c的第一侧上并与触点1142.1和1142.2呈交错关系,用于测量触点1142.3和1142.4之间的电压v。可以提供另一个触点1142e,用于增强在1142c与1142.d之间测量的信号。
102.本发明实施方案的mr传感器可用于检测纳米级磁畴,并且可用于例如扫描探针磁测、生物传感和磁存储等。图12中的(a)和图12中的(b)示出了扫描探针磁强计中使用的示例mr传感器1200的示意性描绘。传感器1200可以具有与图2的传感器100类似的配置,并且就此而言,参考图12中的(b),传感器1200可以包括具有其上布置有石墨烯层1220的波纹表面结构的衬底1210,使得石墨烯层1220与下层表面结构的形状一致。传感器1200还可以包括多个与石墨烯层1220接触的电触点1222a至1222d。触点1222a和1222b可以位于传感器1200的相对端,而触点1222c和1222d位于触点1222a与1222b的中间。dc电流i可以被注入触点1222a并且从触点1222b流出(反之亦然),并且dc电压v可以在触点1222c和1222d之间被测量。可以在磁性介质1202的表面上对包括传感器1200的石墨烯mr探针进行扫描,使得当探针遇到磁畴1204时,测量电阻的突变(如图12中的(a)的插图所示)。
103.本发明实施方案的mr传感器也可用于各种其他应用。例如,mr传感器,例如传感器100(或替代传感器100a、100b、100c或1200),可以用作速度计(图13)、助听器或无线耳塞(图14)或无损裂纹检测(图15)中的定位传感器100。
104.示例
105.衬底制备
106.经由光刻和等离子蚀刻进行蚀刻掩模图案制作:在电子束光刻的情况下,使用电子束抗蚀剂(例如pmma、zep)旋涂衬底,在光刻的情况下,使用光致抗蚀剂(例如s1805、az1512)旋涂衬底。蚀刻掩模可以通过电子束辐照或光束辐照以及在正性抗蚀剂的情况下对已辐照的/不需要的区域进行显影(冲洗)处理来制作。对于负性抗蚀剂(hsq、su-8),辐照区域将在显影过程后保留。接下来,对整个组件进行等离子体蚀刻,以可控地去除暴露区域下方的衬底层。最后,将抗蚀剂冲洗掉,留下波纹衬底层。
107.硬质金属掩模和等离子刻蚀:使用硬质金属掩膜,无需经由光刻过程制造刻蚀掩模。可以将掩模放置在衬底的顶部,整个组件经过等离子体蚀刻以去除暴露的衬底层。掩模起到保护层的作用,与上述情况的抗蚀剂相反。
108.石墨烯转移
109.经由聚合物层的干法转移:石墨烯层可以通过从hopg石墨晶体上剥去并沉积到中间衬底上来制备。接下来,可以经由pdms冲压将石墨烯层对齐并放置在波纹衬底上。pdms是一种透明聚合物层,其可用于冲压和“拾取”石墨烯层,并在加热时将石墨烯层释放到指定衬底上。
110.cvd石墨烯的湿法转移:随着cvd技术的进步,大面积的石墨烯层可以很容易地在cu上生长并经由湿法刻蚀转移方法进行转移。通过对下层cu/ni膜(取决于石墨烯生长在哪个膜上)进行湿法蚀刻,可以将cvd衍生的石墨烯膜转移到非特异性衬底上。这是通过在ni/石墨烯表面或cu/石墨烯表面或特别是聚甲基丙烯酸甲酯(pmma)层上涂覆支撑材料之后,用hcl水溶液(对于ni的情况)或过硫酸铵(ammonium persulphate,aps)溶液(对于cu的情况)处理薄膜来实现的。这就产生了一种可以被轻松处理并放置在所需的目标衬底(面向表面的石墨烯)上的独立的pmma/石墨烯膜状物。最后,可以用丙酮溶解pmma以在所需衬底上
生成石墨烯膜。公开了湿法转移技术的一个示例性参考文献是reina,a.等人的通过化学气相沉积在任意基材上形成大面积、少层的石墨烯膜(large area,few-layer graphene films on arbitrary substrates by chemical vapor deposition),nano lett.9,30
–
35(2009),该文献通过引用并入本文。
111.电触点
112.经由光刻或电子束光刻形成图案:如图8所示,对于电子束光刻的情况,可以用电子束抗蚀剂(例如pmma、zep)旋涂衬底,对于光刻的情况,可以用光致抗蚀剂(例如s1805、az1512)旋涂衬底。电触点可以通过电子束辐照/光束辐照和在正性抗蚀剂的情况下对不需要的区域进行显影(冲洗)的过程来制作。对于负性抗蚀剂(hsq、su-8),已辐照的区域将在显影过程后保留。
113.经由热蒸发或电子束蒸发或溅镀进行金属沉积:在光刻和显影之后,样品可以在热蒸发器或电子束蒸发器或溅镀器中进行金属沉积。为了形成电触点,1)铬cr和2)金au的沉积厚度分别为5nm和65nm。
114.丙酮中的剥离:最后,样品在吹干前经历在丙酮中的剥离过程和ipa冲洗。
115.测量
116.电传输测量是在物理性质测量系统(physical property measurement system,ppms)中进行的,该系统与源仪表(型号2400,keithley inc.)和万用表(型号2002,keithley inc.)连接。以下是关键测量参数:
117.通过源极-漏极触点(相对端的触点)的励磁电流i:
118.可施加通过样品的介于100na至1μa范围内的直流电,以测量存在大小为-9至9t的磁场和不存在磁场(垂直于样品平面)的纵向电阻。
119.通过纵向触点测量的差电压δv:
120.对于1μa的励磁电流,可使用同一侧上相邻的一对电极测量差电压,其大小范围为0.1mv至10mv。
121.纵向电阻r:
122.有磁场和无磁场的纵向电阻可通过r=δv/i进行计算并且可以根据外加磁场绘制曲线图。参见下面的图4和图5。
123.磁电阻mr%:
124.传感器的磁电阻被定义为施加垂直磁场的情况下纵向电阻的百分比变化。参考电阻为无磁场的纵向电阻。磁电阻可以经由mr%=δr/r(b=0)进行计算。
125.应当理解,所描述的实施方案的各个方面的许多进一步修改和排列是可能的。因此,所描述的方面旨在包含落入所附权利要求的精神和范围内的所有此类变化、修改和变型。
126.在本说明书和随后的权利要求书中,除非上下文另有要求,否则词语“包括”以及诸如“含有”和“包含”之类的变型将被理解为意味着包含所描述的整体、步骤或整体或步骤的组合,但不排除任何其他整体、步骤或整体或步骤的组合。
127.本说明书中引用的任何先前出版物(或从中获得的信息)或已知的任何事项,不是也不应被视为对该先前出版物(或从中获得的信息)或已知事项构成本说明书所涉及的工作领域的公知常识的一部分的承认或认可或任何形式的暗示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1