提供关于车辆运行参数的参数估计的可靠性的信息的方法与流程
本发明涉及一种用于提供关于车辆的运行参数的参数估计的可靠性的信息的方法、用于执行该方法的计算机程序、机器可读存储介质和用于车辆的控制设备。本发明特别是适合于与自动驾驶结合使用。
背景技术:
1、自动驾驶最重要的挑战之一是尽可能准确可靠地确定自动驾驶车辆的自身位置。自动驾驶车辆通常具有传感器,例如惯性传感器、车轮传感器、环境传感器、gnss传感器、光学和/或声学传感器,车辆借助于这些传感器可以估计自身位置。就此而言有帮助的是,对于所确定的自身位置还输出关于其(预期)估计精度的信息。就此而言,例如,所确定的自身位置的置信度可以由所谓的“保护水平”(简称:“pl”)表示。在此,pl可以描述统计学误差界限,其计算通常基于统计学考虑,并且必要时还基于估计算法的适当协调。
2、特别是在航空领域中,提供保护级别的概念非常广泛。然而,在该方面开发的解决方案不容易转移到自动驾驶的应用领域。特别是例如房屋峡谷及其对卫星信号的影响造成了航空应用中不存在的问题。因此,需要改进用于计算尽可能可靠的保护水平的方法,其特别是即使在如城市地区等困难环境中也可以提供可靠的结果。
技术实现思路
1、在此,根据权利要求1,说明了一种用于提供关于(机动)车辆的运行参数的参数估计的可靠性的信息的方法,至少包括以下步骤:
2、a)确定参数估计的完整性范围,其中完整性范围描述了具有最小概率的估计参数所处的范围;
3、b)确定有效性指标,其描述了在步骤a)中所确定的完整性范围的有效性;
4、c)提供在步骤a)中所确定的完整性范围和在步骤b)中所确定的有效性指标。
5、步骤a)至c)可以按照指定的顺序依次执行至少一次或多次以执行该方法。此外,步骤a)和b)可以至少部分并行或甚至同时进行。
6、参数可以是安全相关参数和/或与至少部分自动和/或自主驾驶运行相关的或其所需的参数。参数可以提供与车辆的驾驶运行相关的信息和/或有助于或适用于描述车辆的驾驶运行。原则上,可以估计一个或多个(不同类型的)参数。参数例如可以是自身位置、自身速度、自身加速度等。参数优选地与车辆的自身位置相关。
7、参数可以是(机动)车辆的驾驶运行参数。在此,驾驶运行参数特别是可以理解为有助于描述车辆的空间驾驶运行或车辆在空间中的运行的参数。驾驶运行参数特别是至少有助于描述车辆的自身运动和/或自身位置。驾驶运行参数例如可以是车辆的(自身)位置、(自身)速度、(自身)加速度或方位(或方向)。驾驶运行参数优选为车辆的自身位置。由此,该方法例如可以与车辆位置的位置估计结合使用。在此,完整性范围可以描述具有最小概率的所估计的车辆自身位置(实际)所处的范围。
8、待提供的关于参数估计可靠性的信息例如可以包括至少两个信息。该信息优选地包括参数估计的至少一个完整性范围和有效性指标。至少这两个信息的提供可以有利地有助于改善确定(特别是至少部分自动或自主驾驶)车辆自身位置的可靠性。该方法的另一优点体现在:除了呈完整性范围形式的完整性信息之外,还提供了呈有效性指标形式的有效性信息。这使得可以在不必改变完整性范围本身的情况下丰富由完整性范围给出的信息。由此,在不同条件中使用的完整性范围的确定的设计可有利地保持不变或独立于呈有效性指标形式的有效性信息。因此,完整性范围可继续被输出为数学上定义的统计学误差信息或误差界限。这提供了有利的可用性,特别是从统一接口的角度来看,因为不必更改完整性范围的原始含义/定义。模块化设计的可能性也可由此增加。此外,所提供的完整性范围由此必要时也可独立于有效性指标来使用,从而可有利地提高其适用性。
9、在步骤a)中,确定参数估计的完整性范围,其中完整性范围描述了具有最小概率的估计参数(值)(实际)所处的范围。在此,估计参数(值)基本上描述了参数估计的(单个的、特别是瞬时的)估计结果。换言之,这特别是意味着完整性范围描述了具有最小概率的估计参数的真实值或实际值所处的范围。这样的完整性范围也可以被称为所谓的“保护级别”。
10、最小概率通常为预定义的最小概率。最小概率优选为90%,特别是优选为95%或甚至99%。
11、完整性范围优选为保护级别。在此,保护级别通常描述了具有最小概率的估计参数(值)(实际)所处的(空间的、特别是二维或三维的)范围。在此,估计参数(值)基本上描述了参数估计的(单个的、特别是瞬时的)估计结果。换言之,这特别是意味着保护级别描述了具有最小概率的估计参数的真实值或实际值所处的范围。
12、换言之,保护级别特别是描述了具有最小概率的估计参数的真实值所处的置信区间或(空间)置信范围。在此,参数的估计值通常处于置信区间或置信范围的中间或中心。
13、估计参数的真实值或实际值实际上处于保护级别的概率远远高于“通常的”完整性范围的情况。在此,最小概率通常超过99.99%,特别优选超过99.999%,甚至超过99.9999%。对于保护级别,最小概率也可以不以百分比表示,而是以特定时间间隔内的可能错误来表示。保护级别例如可以如下定义:所涉及的参数在十年内超出保护级别最多一次。保护级别例如可以表示为无单位的概率或者比率,即在某个时间间隔内的错误发生概率。
14、参数估计基本上可以包括用于估计(同一)参数的一个或多个方法。优选的是,至少一个方法用于估计该参数,此外其还可以提供和/或确定关于估计完整性的完整性信息或关于估计结果的置信度的置信度信息。例如,可以借助于卡尔曼滤波器进行参数估计。除了(原本的)估计结果之外,这通常还提供关于参数估计的置信度信息(例如协方差矩阵),其在此可以用于确定完整性范围。
15、在步骤b)中,确定有效性指标,其描述在步骤a)中所确定的完整性范围的有效性。有效性指标可以是二进制(有效或无效)或包括各种“数字中间状态”。可能的“中间状态”例如可以表明某个完整性风险数字当前是适用的(例如,城市场景中的1e-3和高速公路上的1e-5)。有效性指标还可以包括例如描述所确定的完整性范围的有效性或可靠性的(数字)值。该确定例如可以包括不同(输入)信息的组合,特别是不同的传感器信息和/或状态信息(例如关于车辆的安全相关系统和/或来自车辆的诊断设备)。例如,至少一个(输入)信息的不可用性也会对有效性指标产生(特别是负面的)影响。
16、例如,根据特别是车辆侧的条件或信息和/或车辆外部的条件或信息和/或关于完整性范围的信息可确定有效性指标。例如,车辆侧条件和/或车辆外部条件可以有助于或多或少地信任所确定的完整性范围。车辆侧条件或信息例如可以是关于特定驾驶情况的信息(例如在限定界限之外的纵向和/或横向加速度)和/或关于(安全相关的)特定车辆状态和/或车辆系统的系统状态的信息(例如至少部分系统故障和/或传感器故障)。车辆外部条件或信息例如可以是关于环境影响的信息,例如天气条件和/或传感器遮蔽。例如可以为相应的条件或信息分配(数字)值,其在存在相应条件的情况下可以被包括在有效性指标的确定中。如果存在多个条件或信息,则例如可以将其彼此相乘和/或相加或逻辑连接,以计算有效性指标。
17、在步骤c)中,提供在步骤a)中所确定的完整性范围和在步骤b)中所确定的有效性指标。在此,优选地可以一起提供所确定的完整性范围和所确定的有效性指标。就此而言,这两个信息可以例如以值对的形式提供。这些信息例如可以被提供给被设置用于车辆的自我定位的车辆系统。这种系统的一个示例可以是车辆的运动和位置传感器和/或用于车辆的至少部分自动或自主驾驶的控制设备。该系统例如可以根据所确定的完整性范围和/或所确定的有效性指标来决定其是否以及必要时特别是以多少权重使用相对应的参数估计来进行位置确定。
18、根据一个有利的设计方案提出,基于车辆的至少一个传感器的传感器数据,根据步骤a)进行完整性范围的确定,和/或根据步骤b)进行有效性指标的确定。该至少一个传感器可以包括例如gnss传感器,其通常接收gnss(全球导航卫星系统)数据(例如gnss校正数据和/或gnss位置数据),并且必要时经(预)处理之后提供gnss数据。该至少一个传感器可以替代地或附加地包括至少一个环境传感器。该至少一个环境传感器例如可以是摄像机、雷达传感器、激光雷达传感器和/或超声波传感器。此外,在根据步骤a)确定完整性范围和/或根据步骤b)确定有效性指标时,还可以考虑其他(或替代)传感器数据和/或输入数据,例如关于车辆参数(例如速度、加速度、转向角等)的传感器数据和/或描述车辆状态的输入数据,例如关于是否有附加部件连接到车辆上,例如拖车、自行车托架等。
19、根据另一有利的设计方案提出,在步骤a)中基于关于参数估计的统计置信度信息来确定完整性范围。统计置信度信息例如可以是参数估计的方差和/或残差。此外,置信度信息(替代地)也可以是根据估计的可靠性的方差和/或残差和/或(其他)指标而确定的信息。作为置信度信息特别是可以考虑残差、方差、协方差等。置信度信息可以例如以协方差矩阵的形式或从协方差矩阵中被提供。
20、特别是就此而言,完整性范围例如可以是置信区间。置信区间(也称为置信范围或期望范围)是来自统计的旨在表明参数(例如平均值)的位置估计精度的区间。置信区间表示当随机实验以一定概率(置信水平)无限重复时包含参数真实位置的范围。
21、根据另一有利实施例提出,通过使用关于车辆的周围环境的至少一个环境信息来确定有效性指标。环境信息可以特别是以车辆环境传感器的数据的形式被提供。环境传感器可以是例如摄像机、雷达传感器、激光雷达传感器和/或超声波传感器。
22、根据另一有利实施例提出,通过使用关于车辆或其部件的状态的至少一个状态信息来确定有效性指标。状态信息例如可以包括关于存在特定驾驶情况的信息,例如特别是在限定的界限之外的纵向和/或横向加速度。状态信息可以例如包括关于存在(安全相关的)特定车辆状态和/或车辆系统的系统状态的信息,例如至少部分系统故障和/或传感器故障。
23、根据另一有利设计方案提出,通过使用步骤a)中所确定的完整性范围来确定有效性指标。由此,完整性范围例如也可以对有效性指标产生影响。
24、根据另一有利设计方案提出,将有效性指标提供为预定的一组值中的一个值。由此,例如可以预设特定的有效性级别,并且可以确定哪些有效性级别当前存在或存在于对应的完整性范围。该组值例如可以是两个,从而有效性指标为二进制。
25、根据另一方面,还提出了一种用于执行在此所述的方法的计算机程序。换言之,特别是涉及一种包括指令的计算机程序(产品),该指令在计算机运行程序时使其执行在此所述的方法。
26、根据另一方面,还提出了一种机器可读存储介质,其上存储有在此所述的计算机程序。机器可读存储介质通常是计算机可读数据载体。
27、根据另一方面,还提出了一种用于(机动)车辆的控制设备,其中该控制设备被设置用于执行在此所述的方法。控制设备例如可以是用于车辆自身定位的设备(或计算机)。
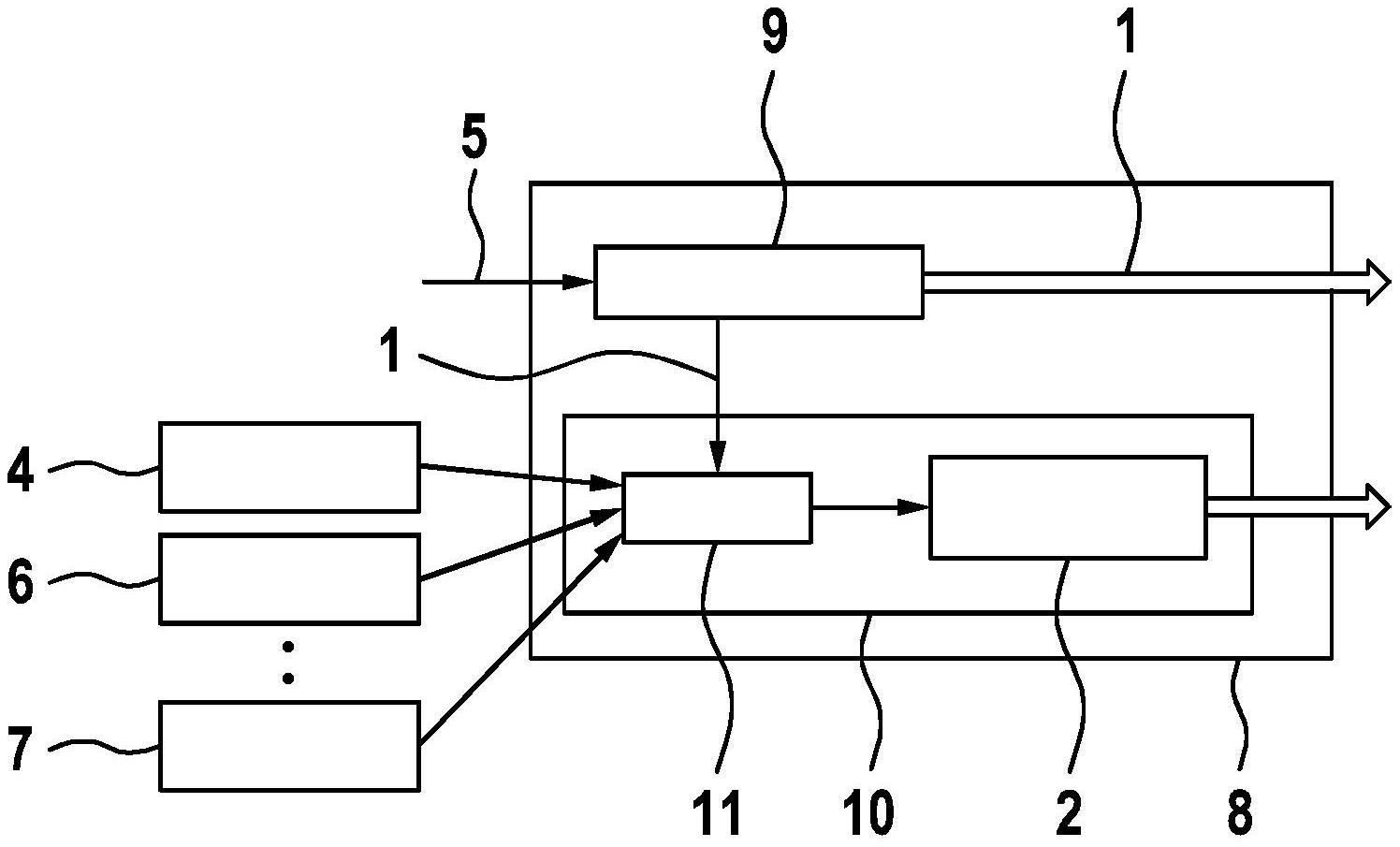
28、控制设备例如可以包括用于确定完整性范围的完整性模块和用于确定有效性指标的有效性模块。在此,这些模块基本上可以实现为控制设备的物理组件或计算机程序的一部分。在此,完整性模块例如可以被设置为根据至少一个置信度信息来确定完整性范围。置信度信息可以例如由卡尔曼滤波器估计得到。有效性模块可以例如被设置为根据特别是车辆侧的条件或信息和/或车辆外部的条件或信息和/或完整性范围来确定有效性指标。为此,有效性模块例如可以包括组合器,利用其可以将各种信息(例如车辆侧的条件或信息和/或车辆外部的条件或信息和/或关于完整性范围的信息)组合或(预)处理成有效性指标,然后可以将处理后的信息组合成有效性指标。各种信息例如可以包括传感器数据、至少一个环境信息和/或至少一个状态信息和/或者至少一个关于完整性范围的信息。
29、此外,还提出具有在此所述的控制设备的机动车。机动车基本上为汽车,优选为至少部分自动和/或自主操作的汽车,特别是自主汽车。
30、因此,结合该方法所述的细节、特征和有利设计方案也可以出现在本文介绍的计算机程序、存储介质、控制设备和/或车辆中,反之亦然。就此而言充分参考该处的解释,以更详细地说明特征。
- 还没有人留言评论。精彩留言会获得点赞!