一种精密进近下地基增强系统完好性评估方法及系统与流程
1.本发明涉及卫星导航技术领域,特别涉及一种精密进近下地基的地基增强系统完好性评估方法及系统。
背景技术:
2.为每个可见星提供测距误差校正信息,这些校正极大地提高了飞机的定位精度,并支持精密进近和自动着陆。在飞机精密进近过程中,电离层异常事件对于飞机的定位及精密进近过程有着重大的影响。
3.gbas(地基增强系统)的工作原理是通过地面参考站的形式将差分改正信息和误差信息通过甚高频数据广播播发给用户,从而对用户的完好性进行增强。在gbas(地基增强系统)开发过程中,已经评估过异常电离层梯度对 gbas 的影响。cat-i gbas(地基增强系统一类精密进近)中的现有技术涉及进行详尽的模拟,以在最坏情况的电离层参数和卫星、飞机的最坏几何形状的所有可能组合中搜索最大的差分距离误差。 但是在cat-i gbas仿真过程中并未涉及危险的电离层事件。电离层是部分电离的大气区域,完全电离的大气区域称磁层。电离层的范围从离地面约50公里开始一直伸展到约1000公里高度的地球高层大气空域,且其中存在相当多的自由电子和离子,能使无线电波改变传播速度,发生折射、反射和散射,而由于卫星都处于大气层外,卫星信号传播到地球上必须要经过大气层中的电离层,于是必然要受到电离层的影响。由于电离层在不同位置的水平分布较为不均匀,受时间影响的变化复杂,且还存在一定的异常变化特征,给gnss(全球导航卫星系统)性能提升和建立全球或区域范围内的电离层异常模型带来了挑战。虽然这种情况在概率上微不足道,但其存在会导致非常保守的评估。因此,需要对异常梯度造成的电离层威胁进行更真实的描述。
4.完好性反映了导航系统在不能用于导航服务时及时向用户提出告警的能力,作为地基增强系统的重要性能指标,完好性评估与风险识别的可用性仍有很大的研究空间,本发明利用蒙特卡洛采样仿真系统模拟极端情况下的飞机精密进近过程,以评估在极端情况中地基增强系统在最严格的运作标准下完好性指标能否满足要求。
技术实现要素:
5.为了解决上述问题,本发明公开了一种精密进近下地基增强系统完好性评估系统与方法,利用蒙特卡洛采样方法和多完好性监视器组合,以飞机精密进近过程为背景,解决了现有技术中对潜在完好性风险识别能力差的问题。
6.技术方案如下,一种精密进近下地基增强系统完好性评估方法,包括如下步骤:步骤1,设置仿真飞机进近参数:包括固定参数与随机参数,固定参数通过系统设定,随机参数通过蒙特卡洛采样得到,由随机参数组成电离层仿真参数;步骤2,基于进近参数进行地基增强系统下的飞机精密进近仿真:确定飞机的相对位置,测量得到伪距,并通过差分校正该伪距得到伪距误差,判断电离层是否对伪距误差有
影响,并最终确认进近飞机的伪距误差;步骤3,基于步骤1的仿真飞机进近参数及步骤2的仿真结果,进行完好性参数仿真,仿真期间内每秒生成监视器监测量/检验统计量;步骤4,当信号异常时监视器的监测量/检验统计量会超出预设的阈值,将监视器的监测量/检验统计量与阈值做比较以得到监测超限情况,将该超限情况结合完好性参数仿真结果得到漏检概率p
md
,即记录下对应于每组完好性参数下的漏检时间占单次精密进近仿真时间的百分比;步骤5,将各个监视器的漏检概率p
md
进行组合得到组合漏检概率p
com
,以消除各个监视器间的相关性,并利用组合漏检概率p
com
解出危险误导信息概率p
hmi
以判断在飞机精密进近过程中的完好性。
7.本发明还公开了一种精密进近下地基增强系统完好性评估系统,包括参数仿真模块和测量模块,所述参数仿真模块对飞机进行精密进近参数仿真采样,测量模块整合现场采集的辅助数据,提前测量辅助数据并将其加入到仿真过程中以提升仿真系统的适用性与可靠性;基于测量模块测量的数据进行精密进近参数仿真采样,并将仿真采样结果发送到差分处理模块和监视器模块;所述差分处理模块对飞机精密进近过程差分定位仿真,所述监视器模块在仿真过程中采集每个监视器的测试参数,将每个监视器在进近期间漏检概率的最小值发送至数据记录模块进行记录,最终将采集到的每个监视器的漏检概率进行组合,以计算在极限情况下飞机精密进近过程中的gbas的完好性风险。
8.有益效果:(1)本发明公开的方法通过仿真场景参数随机采样与飞机精密进近仿真相结合,并通过测距误差监测和完好性监视器来判断飞机精密进近过程中异常电离层事件导致的完好性风险,探索了gbas在精密进近过程中极限情况下的完好性,以满足最严格的航空运作要求;(2)本发明利用蒙特卡洛仿真,在地基增强系统下飞机精密进近的各个环节都进行了参数采样与仿真,以模拟在最极端的异常事件影响下地基增强系统提供服务的能力,为地基增强系统的实际运作提供理论基础;(3)本发明通过组合多个监测器在大量仿真后得到的漏检概率,可以得到比传统方法更加有效可靠的危险误导概率信息,这大大提升了计算结果的可用性,提高了仿真系统的可靠性。
附图说明
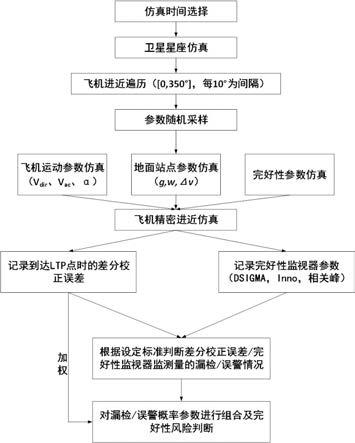
9.图1为本发明一个实施例的精密进近下地基增强系统完好性评估系统结构示意图;图2为本发明一个实施例的电离层波峰侧视图;图3为本发明一个实施例的精密进近下地基增强系统完好性评估方法的流程图。
具体实施方式
10.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
11.本发明公开了一种地基增强系统精密进近下完好性评估方法及系统,通过仿真场景参数随机采样结合飞机精密进近仿真,最终通过测距误差监测和完好性监视器来判断在飞机精密进近过程中异常电离层事件导致的完好性风险。
12.由于电离层在不同位置的水平分布较为不均匀,受时间影响的变化复杂,且还存在一定的异常变化特征,因此电离层的此类特征给gbas性能提升和建立全球和区域内的电离层异常梯度模型带来了困难。在本发明中,如图1所示,本专利使用的电离层模型为有线性变化的楔形锋面,该电离层模型为以某个采样得到的速度移动的电离层封面模型的一种。
13.如图1所示,一种地基增强系统精密进近下完好性评估方法及系统,包括如下步骤:步骤1,设置仿真飞机进近参数,包括站点参数、完好性监视器参数和飞机运动参数,并将其分为固定参数与随机参数,在仿真系统中事先设定固定参数,通过蒙特卡洛采样得到随机参数,由该随机参数组成电离层仿真参数。
14.其中,站点参数包括:飞机进近机场编号、gbas地面站设备与着陆阈值点的距离、电离层仿真参数(电离层锋面宽度、坡度与速度、锋面移动方向)、卫星星座仿真;完好性监视器参数包括:ccd监测平滑时间常数、相关对码片间距半长、相关峰最小检测误差的拟合参数;飞机运动参数包括:飞机进场速度、飞机进近跑道方向、飞机着陆方向角;飞机运动参数包括:飞机进场速度、飞机进近跑道方向、飞机着陆方向角。
15.固定参数与随机参数分配如表1和表2所示,随机参数由蒙特卡洛采样得到,蒙特卡洛采样步骤为:步骤1.1,确认仿真时间:蒙特卡洛仿真每一分钟提供一次卫星构型变化数据,一天内共有1440个历元。
16.步骤1.2,进行卫星星座仿真,利用仿真卫星对飞机进行定位。
17.步骤1.3,仿真飞机进近方向:从-90
°
到90
°
每隔10
°
模拟飞机的进近方向。
18.步骤1.4,仿真飞机进近参数中的飞机运动参数、站点参数以及完好性监视器参数均匀分布并随机组合生成异常事件威胁模型,并基于步骤1.1及步骤1.2确认的仿真时间及
进近方向对该模型进行随机采样。
19.采用均匀分布方法生成随机参数并随机组合,其中由于飞机的电离层穿刺点 (ipp) 和地面设施在 gbas 服务区域内在空间上都很近,则可以假设飞机的电离层穿刺点 (ipp)与地面电离层穿刺点 (ipp)的相对速度是飞机的进近速度。
20.步骤2,进行地基增强系统下的飞机精密进近仿真,仿真过程包括飞机运动参数仿真、差分校正过程、误差计算过程、完好性监测过程,具体为:步骤2.1,通过仿真参数来确定飞机的位置:利用步骤1中的随机参数中的电离层仿真参数解出电离层的位置,并利用采样得到的飞机进近机场编号、进近跑道方向以及事先设定的地面参考站位置,并进行卫星星座仿真,结合该星座仿真结果得到着陆阈值点(ltp),通过反推得到飞机初始仿真位置,此时地面站、飞机、电离层的相对位置便通过仿真得到。
21.步骤2.2,设定飞机进近过程为抛物线轨迹,基于步骤2.1确定的飞机位置,测量得到载波相位测量值和伪距,并通过载波相位测量的变化值平滑伪距,以减少伪距中的快变误差。
22.在gbas中,载波相位测量值平滑伪距的方法用于减轻飞机和地面设施中接收机噪声和多径误差的影响,其本质上是利用载波相位的高精度对于伪距测量值进行辅助,影响伪距测量值。由表示的载波平滑后的伪距被定义为:其中,ρ(t)和φ(t)分别表示给定历元t的单频伪距和载波相位测量值,,m=τ/t其中τ为载波平滑滤波时间常数,t为原始观测值的采样间隔,通常为0.5秒。在该仿真中,假设伪距和载波相位测量值仅由电离层延迟造成,且飞机和地面设施都使用30秒的平滑时间常数。
23.对接收到的伪距和载波相位测量值同已知的真实距离做差分,分别计算平滑伪距
校正值和载波相位校正值。
24.步骤2.3,通过蒙特卡洛仿真得到的电离层仿真参数计算电离层对于伪距误差的影响,在仿真中,异常电离层梯度以gbas的标准方式建模为楔形波峰。如图2所示,为一架飞机和一个朝向gbas地面设施移动的电离层波峰的侧视图。波峰斜率代表电离层延迟从高到低的线性变化。梯度和电离层锋面宽度的乘积为总的电离层延迟。具体为:确定电离层穿刺点,根据电离层穿刺点的位置决定其对于伪距测量是否有影响,若穿刺点位置在异常电离层范围内,则需要根据电离层梯度及锋面情况计算异常电离层引起的伪距误差并与步骤2.2中的校正误差结合作为进近飞机的伪距误差。
25.步骤3,进行完好性参数仿真,基于上述参数,在仿真期间内每秒生成四个监视器的测距误差、检验统计量。
26.步骤4,当信号异常时监视器的监测量/检验统计量会超出预设的阈值,将监视器的监测量/检验统计量与阈值做比较以得到监测超限情况。在每个仿真历元,计算每个监视器的监测量超限情况并记录在ltp点的差分距离误差,最终结合仿真情况,在约10
10
数量级的仿真样本得到每个监视器的漏检概率p
md
。
27.四个监视器包括码/载波分歧(ccd)监视器、载波平滑码更新(inno)监测器、相关峰(correlation peak)监测器和双平滑电离层梯度(dsigma)监视器。具体监测过程如下:码/载波分歧(ccd)监视器:ccd监测通常用于探测电离层风暴是否发生,并且保证所有给定卫星的ccd不发生异常。通常采用几何滑动平均方式来估计ccd,其计算方式如下所示:式中,ccd
(m,n)
(k)为码载波分歧值的监测量,其中(m,n)代表对应的第m颗卫星和第n台接收机,τd为平均持续时间,是一个值为90秒的常量,ts是地基增强系统的测量值的更新频率,一般为0.5秒;z(k)为k时刻的码减载波(code minus carrier, cmc)观测量,通过下式得到:z(k)=ρ(k)-φ(k)其中,ρ(k)表示k时刻的原始伪距观测量,即时刻未经平滑的原始伪距观测量,φ(k)代表对应于k时刻的载波观测量,m(k)代表多径效应的影响,n(k)代表整周模糊度、λ代表载波波长,为电离层梯度,由步骤1中仿真得到。
28.通过将计算得到的ccd监测量与阈值相比,可以得到超限的ccd观测量。
29.相关峰(correlation peak)监测器利用仿真虚拟相关峰来模拟相关峰监测中出现的异常,通过拟合函数模拟相关峰监测的检验统计量来对信号形变异常进行仿真,最终
判断潜在的完好性风险。即:利用步骤1中随机生成的拟合参数,结合步骤2中飞机相对位置确定仿真,通过观测数据解算的卫星仰角,通过仿真虚拟相关对来模拟相关峰监测流程中出现的异常情况,通过拟合函数模拟相关峰监测的检验统计量来对信号形变异常进行仿真,最终来判断潜在的完好性风险,具体方式如下:相关峰的检验统计量为最小可监测误差(minimum detective error, mde)是指接收机在保证一定的虚警概率(probability of false alarm, fa)和危险错误信息概率(probability of hazardly misleading information, hmi)条件下,可检测到的最小误差,也是δ算法的判决阈值。相关峰监测中的最小可监测误差mde可由如下公式计算:其中,式中,k
ffd
表示由自由虚警概率决定的膨胀系数,k
md
表示由漏检概率决定的膨胀系数,飞机在不同等级的精密终端导航和精密进近过程中会有不同的膨胀系数要求。假设飞机接收的卫星信号统计误差满足高斯分布。表示待测参数的标准差,这里的待测参数是指“从相关对”测量值(
△1,
△2…△
c-1
)与“主相关对”测量值(
△
ref
)的差。
30.相关峰拟合函数是基于信号质量接收机的检验统计量r建模的相关峰最小检测误差mde关于仰角的函数,在不同码片间距下具有不同的系数,根据函数随机生成当前的mde即相关峰判决门限,检验统计量r的传统计算方法为:其中i
prompt
为相关时间间隔为0时相关器的输出,对于正常的c/a码,该时间对应的为峰值,i
offset
为相关器时间间隔非0时的相关器输出,负号代表滞后,正号代表超前。当信号发生异常时,统计量会超出阈值。
31.最终对r监测量进行拟合,最终的拟合函数形式为:最终对r监测量进行拟合,最终的拟合函数形式为:表示卫星仰角,r角标代表码片间距半长,式中的系数范围见下表:通过mde的拟合函数仿真相关峰监测器的监测值,记录超限部分的阈值用以计算该监视器的p
md
。
32.载波平滑码更新(inno)监测器:利用步骤2中计算的伪距和载波相位测量值计算载波平滑码更新监测量,用以检测原始伪距测量中误差,主要检查其中的脉冲和阶跃误差,
检验统计量为:ρs(k-1)代表(k-1)时刻的平滑后伪距观测量,φ(k)代表k时刻的载波观测量。
33.双平滑电离层梯度(dsigma)监视器:利用设定不同平滑常数的滤波器,在载波平滑伪距过程中产生的校正伪距的差,通过设定阈值对于电离层异常事件进行监测,dsigma监测器由两个分别具有平滑时间常数为100秒和30秒的滤波器,其本质为一个二阶的带通滤波器,其检验统计量为:p
c_100
和p
c_30
分别代表平滑时间常数为100秒和30秒的当前时间的校正伪距。
34.需要注意的是,监视器中的阈值建模均以高斯分布依据历史数据及rtca do-246e标准搭建,在着陆阈值点的伪距误差阈值依据icao sarps(标准及建议措施)设定为2.75m。
35.步骤5,通过将各个监视器解算出的p
md
进行组合以消除各个监视器间的相关性,并利用组合误警率解出危险误导信息p
hmi
概率以判断在飞机精密进近过程中的完好性,漏检概率使用如下方式组合:p
com
=min[p
md,cp
×
p
md,ccd
,p
md,cp
×
p
md,dsigma
,p
md,cp
×
p
md,inno
]其中p
md,
‑‑
代表不同监视器的漏检概率,p
md,cp
, p
md,ccd
,p
md,dsigma
,p
md,inno
分别表示相关峰监测器的漏检率、码/载波分歧监视器的漏检率、双平滑电离层梯度监视器的漏检率、载波平滑码更新监测器的漏检率。
[0036]
p
com
加权得到危险误导信息概率p
hmi
,具体为:其中n为仿真参数样本的总数,i为仿真参数样本的部分测距误差超限子集,完好性评估系统会在飞机经过事先设定着陆阈值点测距误差超限的情况下记录下这些样本并用以加权。一旦测距误差超过定义的限值,系统便会记录一次,此时将仿真结束后所有记录到的测距误差超限的仿真次数即为i。
[0037]
利用该仿真系统得到的危险误导信息概率,可以得到在该环境下的地基增强系统在极端环境下出现危险的概率,通过对比机场性能要求标准,可以评估该地基增强系统在该区域的完好性。
[0038]
在实际使用过程中,仿真系统利用当地实测的历史数据对于各个监测量建模并设定阈值,并利用蒙特卡洛采样对于各个参数进行设定生成并组合以决定单次精密进近仿真前的参数配置,接下来基于仿真出来的多组参数进行飞机精密进近仿真,记录部分关键测试参数并基于此来解算飞机在单次精密进近过程中的漏检概率,最后将其进行组合以得到飞机危险误导信息概率,进而评估飞机在极端情况下的完好性风险。
[0039]
如图3所示,本发明还公开了一种地基增强系统精密进近下完好性评估系统,包括参数仿真模块和测量模块,参数仿真模块对飞机进行精密进近参数仿真采样,测量模块整合现场采集的辅助数据,例如机场的具体位置、接收机的观测精度,将这些数据提前测量并
将其加入到仿真过程中能够提升仿真系统的适用性与可靠性。基于测量模块测量的参数进行精密进近参数仿真采样,并将仿真数据发送到差分处理模块和监视器模块,差分处理模块对飞机精密进近过程差分定位仿真,监视器模块在仿真过程中采集每个监视器的测试参数,将每个监视器在进近期间漏检概率的最小值发送至数据记录模块进行记录,最终将采集到的每个监视器的漏检概率进行组合,以计算在极限情况下飞机精密进近过程中的gbas的完好性风险。
[0040]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1