智能手机及测量方法与流程
1.本发明涉及一种智能手机及测量方法。
背景技术:
2.随着终端设备(如手机、平板电脑等)功能的日益强大,手机已经成为日常生活中不可或缺的用品。
3.由于智能手机在人们日常生活中的重要性,手机会集成更多的功能,如专利申请cn201020639150.4中公开的激光测距手机,这种产品为人们的工作和生活带来了许多便利。
4.现有的激光测距手机存在操作繁琐、功能单一、准确性低的缺陷,无法满足高要求用户的需求。
技术实现要素:
5.本发明要解决的技术问题是为了克服现有技术中激光测距手机存在操作繁琐、功能单一、准确性低的缺陷,提供一种能够方便用户测量距离,操作便捷的同时能够快速获得多种参数,功能丰富且测量精度高的智能手机及测量方法。
6.本发明是通过下述技术方案来解决上述技术问题:
7.一种智能手机,所述智能手机包括一触控显示屏、一处理模块、一红外发射器以及一红外接收器,所述红外发射器以及红外接收器并排设于智能手机的侧边,
8.所述触控显示屏用于显示测量模式;
9.所述红外发射器以及红外接收器用于测量智能手机到探测目标的距离;
10.所述处理模块用于根据用户选择的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
11.所述触控显示屏还用于输出所述测量结果。
12.较佳地,所述测量模式包括测距模式,
13.在测距模式下,所述处理模块用于根据红外发射器以及红外接收器获取的探测距离获取所述智能手机到探测目标的距离作为测距的测量结果。
14.较佳地,所述测量模式包括面积测量模式,
15.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在第一测量点或第二测量点测量智能手机到第二探测目标的距离以获取第二距离;
16.在面积测量模式下,所述处理模块用于获取第一距离和第二距离的乘积作为面积的测量结果。
17.较佳地,所述测量模式包括体积测量模式,
18.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离、在第一测量点或第二测量点测量智能手机到第二探测目标的距
离以获取第二距离以及在第一测量点或第三测量点测量智能手机到第三探测目标的距离以获取第三距离;
19.在体积测量模式下,所述处理模块用于获取第一距离、第二距离以及第三距离的乘积作为体积的测量结果。
20.较佳地,所述测量模式包括勾股测量模式,
21.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在所述第一测量点测量智能手机到第二探测目标的距离以获取第二距离;
22.在勾股测量模式下,所述处理模块用于根据第一距离与第二距离获取第三距离,所述第一距离和第二距离为一个直角三角形的斜边和一个直角边,所述第三距离为另一个直角边。
23.较佳地,所述智能手机还包括一惯性测量单元,
24.所述惯性测量单元用于在所述红外发射器以及红外接收器测量智能手机到探测目标的距离时获取对应的姿态信息;
25.所述处理模块用于按照预设规则以及所述姿态信息获取测量模式,所述预设规则包括在测量点获取所述红外发射器以及红外接收器的测量次数,当测量次数为1时则判定所述测量模式为测距模式;当测量次数为2时根据姿态信息获取两次测量的测量方向夹角是否垂直,若是则判定所述测量模式为面积测量模式,若否则判断两次测量的长度以及测量方向夹角是否构成直角三角形,若构成则判定所述测量模式为勾股测量模式;当测量次数为3时根据姿态信息获取任意两次测量方向夹角是否垂直,若垂直则判定所述测量模式为体积测量模式;
26.所述处理模块用于根据处理模块获取的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
27.所述触控显示屏还用于输出所述测量结果。
28.较佳地,所述测量模式包括精准测量模式,
29.在精准测量模式下,所述红外发射器以及红外接收器用于在第一测量点按预设时间间隔测量若干次智能手机到第一探测目标的距离以获取一长度集合,所述长度集合中的每一长度数据均对应一测量时的姿态信息;
30.在所述精准测量模式下,所述处理模块用于根据所述长度集合中长度数据对应的姿态信息获取一测量方向范围,所述测量方向范围为所述红外发射器以及红外接收器的测量方向的范围,在所述测量方向范围中所述红外发射器以及红外接收器的测量密度达到预设值;
31.所述处理模块用于在所述测量方向范围内获取最长或最短的测量距离作为精准距离。
32.较佳地,在所述精准测量模式下,所述处理模块用于通过惯性测量单元获取智能手机的测量方向与水平面的夹角,当所述夹角小于预设夹角时处理模块在所述测量方向范围内获取最短的测量距离作为精准距离,当所述夹角大于预设夹角时处理模块在所述测量方向范围内获取最长的测量距离作为精准距离。
33.较佳地,所述智能手机还包括一激光指示器,所述激光指示器的指示方向与所述
红外发射器以及红外接收器的测量方向相同,所述测量模式包括高度指示模式,在所述高度指示模式下:
34.所述触控显示屏用于采集指示高度的指令;
35.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的水平距离;
36.所述处理模块用于根据所述水平距离以及所述指令中包含的高度获取一夹角数据;
37.所述处理模块还用于通过智能手机的测量方向与水平面的夹角是否等于所述夹角数据,若是则激活所述激光显示器显示。
38.本发明还提供一种用于智能手机的测量方法,所述测量方法通过如上所述的智能手机测量距离。
39.在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
40.本发明的积极进步效果在于:
41.本发明的智能手机及测量方法能够方便用户测量距离,操作便捷的同时能够快速获得多种参数,功能丰富且测量精度高。
附图说明
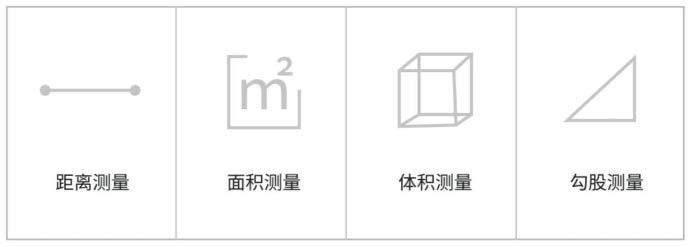
42.图1为本发明实施例1的触控显示屏显示界面的结构示意图。
具体实施方式
43.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
44.实施例1
45.本实施例提供一种智能手机,所述智能手机包括一触控显示屏、一处理模块、一红外发射器以及一红外接收器,所述红外发射器以及红外接收器并排设于智能手机的侧边。
46.参见图1,所述触控显示屏用于显示测量模式;
47.所述红外发射器以及红外接收器用于测量智能手机到探测目标的距离;
48.所述处理模块用于根据用户选择的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
49.所述触控显示屏还用于输出所述测量结果。
50.本实施例的智能手机包括4中测量模式:
51.1、测距模式:用于单次测量距离。
52.2、面积测量模式:用于自动计算测量的距离乘积以求取面积。
53.3、体积测量模式:用于自动计算测量的距离乘积以求取体积。
54.4、勾股测量模式:用于测量直角边和斜边,并通过勾股定理求取面积。
55.具体地,在测距模式下:所述处理模块用于根据红外发射器以及红外接收器获取的探测距离获取所述智能手机到探测目标的距离作为测距的测量结果。
56.在面积测量模式下:
57.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在第一测量点测量智能手机到第二探测目标的距离以获取第二距离;
58.所述处理模块用于获取第一距离和第二距离的乘积作为面积的测量结果。
59.进一步地,利用惯性测量单元,处理器能够获取第一距离的测量方向与第二距离的测量方向是否垂直,若垂直则获取第一距离和第二距离的乘积作为面积的测量结果。
60.在体积测量模式下:
61.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离、在第一测量点测量智能手机到第二探测目标的距离以获取第二距离以及在第一测量点测量智能手机到第三探测目标的距离以获取第三距离;
62.所述处理模块用于获取第一距离、第二距离以及第三距离的乘积作为体积的测量结果。
63.在勾股测量模式下:
64.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在所述第一测量点测量智能手机到第二探测目标的距离以获取第二距离;
65.所述处理模块用于根据第一距离与第二距离获取第三距离,所述第一距离和第二距离为一个直角三角形的斜边和一个直角边,所述第三距离为另一个直角边。
66.利用上述智能手机,本实施例还提供一种测量方法,包括:
67.所述触控显示屏显示测量模式;
68.所述触控显示屏采集用户选择的测量模式;
69.所述红外发射器以及红外接收器测量智能手机到探测目标的距离;
70.所述处理模块根据用户选择的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
71.所述触控显示屏输出所述测量结果。
72.当所述测量模式为测距模式时,测量方法包括:
73.在测距模式下,所述处理模块根据红外发射器以及红外接收器获取的探测距离获取所述智能手机到探测目标的距离作为测距的测量结果。
74.当所述测量模式为面积测量模式时,测量方法包括:
75.所述红外发射器以及红外接收器在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在第一测量点或第二测量点测量智能手机到第二探测目标的距离以获取第二距离;
76.在面积测量模式下,所述处理模块获取第一距离和第二距离的乘积作为面积的测量结果。
77.当所述测量模式为体积测量模式时,测量方法包括:
78.所述红外发射器以及红外接收器在第一测量点测量智能手机到第一探测目标的距离以获取第一距离、在第一测量点或第二测量点测量智能手机到第二探测目标的距离以获取第二距离以及在第一测量点或第三测量点测量智能手机到第三探测目标的距离以获取第三距离;
79.所述处理模块获取第一距离、第二距离以及第三距离的乘积作为体积的测量结果。
80.当所述测量模式为勾股测量模式时,测量方法包括:
81.所述红外发射器以及红外接收器在第一测量点测量智能手机到第一探测目标的距离以获取第一距离,并在所述第一测量点测量智能手机到第二探测目标的距离以获取第二距离;
82.所述处理模块根据第一距离与第二距离获取第三距离,所述第一距离和第二距离为一个直角三角形的斜边和一个直角边,所述第三距离为另一个直角边。
83.实施例2
84.本实施例与实施例1基本相同,不同之处仅在于:
85.所述智能手机还包括一惯性测量单元,
86.所述惯性测量单元用于在所述红外发射器以及红外接收器测量智能手机到探测目标的距离时获取对应的姿态信息;
87.所述处理模块用于按照预设规则以及所述姿态信息获取测量模式,所述预设规则包括在测量点获取所述红外发射器以及红外接收器的测量次数,当测量次数为1时则判定所述测量模式为测距模式;当测量次数为2时根据姿态信息获取两次测量的测量方向夹角是否垂直,若是则判定所述测量模式为面积测量模式,若否则判断两次测量的长度以及测量方向夹角是否构成直角三角形,若构成则判定所述测量模式为勾股测量模式;当测量次数为3时根据姿态信息获取任意两次测量方向夹角是否垂直,若垂直则判定所述测量模式为体积测量模式;
88.所述处理模块用于根据处理模块获取的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
89.所述触控显示屏还用于输出所述测量结果。
90.进一步地,所述测量模式包括精准测量模式,
91.在精准测量模式下,所述红外发射器以及红外接收器用于在第一测量点按预设时间间隔测量若干次智能手机到第一探测目标的距离以获取一长度集合,所述长度集合中的每一长度数据均对应一测量时的姿态信息;
92.在所述精准测量模式下,所述处理模块用于根据所述长度集合中长度数据对应的姿态信息获取一测量方向范围,所述测量方向范围为所述红外发射器以及红外接收器的测量方向的范围,在所述测量方向范围中所述红外发射器以及红外接收器的测量密度达到预设值;
93.所述处理模块用于在所述测量方向范围内获取最长或最短的测量距离作为精准距离。
94.具体地,在所述精准测量模式下,所述处理模块用于通过惯性测量单元获取智能手机的测量方向与水平面的夹角,当所述夹角小于预设夹角时处理模块在所述测量方向范围内获取最短的测量距离作为精准距离,当所述夹角大于预设夹角时处理模块在所述测量方向范围内获取最长的测量距离作为精准距离。
95.所述智能手机还包括一激光指示器,所述激光指示器的指示方向与所述红外发射器以及红外接收器的测量方向相同,所述测量模式包括高度指示模式,在所述高度指示模
式下:
96.所述触控显示屏用于采集指示高度的指令;
97.所述红外发射器以及红外接收器用于在第一测量点测量智能手机到第一探测目标的水平距离;
98.所述处理模块用于根据所述水平距离以及所述指令中包含的高度获取一夹角数据;
99.所述处理模块还用于通过智能手机的测量方向与水平面的夹角是否等于所述夹角数据,若是则激活所述激光显示器显示。
100.利用上述智能手机,本实施例还提供一种测量方法,包括:
101.所述惯性测量单元在所述红外发射器以及红外接收器测量智能手机到探测目标的距离时获取对应的姿态信息;
102.所述处理模块按照预设规则以及所述姿态信息获取测量模式,所述预设规则包括在测量点获取所述红外发射器以及红外接收器的测量次数,当测量次数为1时则判定所述测量模式为测距模式;当测量次数为2时根据姿态信息获取两次测量的测量方向夹角是否垂直,若是则判定所述测量模式为面积测量模式,若否则判断两次测量的长度以及测量方向夹角是否构成直角三角形,若构成则判定所述测量模式为勾股测量模式;当测量次数为3时根据姿态信息获取任意两次测量方向夹角是否垂直,若垂直则判定所述测量模式为体积测量模式;
103.所述处理模块根据处理模块获取的测量模式以及红外发射器以及红外接收器采集的探测距离获取测量结果;
104.所述触控显示屏输出所述测量结果。
105.所述测量模式包括精准测量模式,所述测量方法包括:
106.在精准测量模式下,所述红外发射器以及红外接收器在第一测量点按预设时间间隔测量若干次智能手机到第一探测目标的距离以获取一长度集合,所述长度集合中的每一长度数据均对应一测量时的姿态信息;
107.在所述精准测量模式下,所述处理模块根据所述长度集合中长度数据对应的姿态信息获取一测量方向范围,所述测量方向范围为所述红外发射器以及红外接收器的测量方向的范围,在所述测量方向范围中所述红外发射器以及红外接收器的测量密度达到预设值;
108.所述处理模块在所述测量方向范围内获取最长或最短的测量距离作为精准距离。
109.进一步地,所述测量方法包括:
110.在所述精准测量模式下,所述处理模块通过惯性测量单元获取智能手机的测量方向与水平面的夹角,当所述夹角小于预设夹角时处理模块在所述测量方向范围内获取最短的测量距离作为精准距离,当所述夹角大于预设夹角时处理模块在所述测量方向范围内获取最长的测量距离作为精准距离。
111.所述智能手机还包括一激光指示器,所述激光指示器的指示方向与所述红外发射器以及红外接收器的测量方向相同,所述测量模式包括高度指示模式,在所述高度指示模式下,所述测量方法包括:
112.所述触控显示屏采集指示高度的指令;
113.所述红外发射器以及红外接收器在第一测量点测量智能手机到第一探测目标的水平距离;
114.所述处理模块根据所述水平距离以及所述指令中包含的高度获取一夹角数据;
115.所述处理模块通过智能手机的测量方向与水平面的夹角是否等于所述夹角数据,若是则激活所述激光显示器显示。
116.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1