一种基于电磁网格的室内定位系统及定位方法
1.本发明属于室内定位技术领域,具体涉及一种基于电磁网格的室内定位系统及定位方法。
背景技术:
2.随着汽车智能化的发展,自动驾驶技术蓬勃发展。定位和高精度地图作为自动驾驶系统的感知输入,为自动驾驶感知、决策与控制起到重要作用,是自动驾驶结局按方案中不可或缺的一环。
3.目前,常用的室内定位技术有超宽带(uwb)室内定位技术、射频识别(rfid)技术、wi-fi技术、蓝牙室内定位技术和超声波室内定位技术。其中uwb技术和wifi、蓝牙、rfid等定位技术相比,定位精度相对较高,可达到10cm,但成本基本是其他定位技术的10倍以上。uwb技术精度要求越高,相应的布设基站成本就越高。如覆盖一个50*50米,总计2500m2的空间,需要4个uwb定位描点,基站价格约4万元,平均定位精度在20cm左右。而其他定位技术包括射频识别技术、wi-fi技术、蓝牙技术等均存在定位漂移也即定位精度低的问题。
4.自动驾驶agv在室内进行货物运输及定点位置装卸货物时,对定位的提出了较高的要求(10cm及以下)。因此,有必要开发一种成本较低且精度高、可靠性高的室内定位系统以解决现有自动驾驶agv在室内进行货物运输时的定位问题。
技术实现要素:
5.针对上述存在的技术问题,本发明提供了一种基于电磁网格的室内定位系统及定位方法,利用电磁感应效应和磁场共振原理,实现高精度可靠性的定位效果,解决现有技术中室内定位成本高和定位漂移的问题。
6.本发明的技术方案是:
7.本发明的一个目的在于提供一种基于电磁网格的室内定位系统,包括:
8.车载送电线圈组,其包括分别设于车载端的车头和车尾的两个振动频率不一的送电线圈,所述两个送电线圈由车载端供电;
9.路侧受电线圈组,其包括由布置在室内地面的若干纵横交叉间隔的受电线圈形成的线圈网格和接收器、译码器及数据发送装置,任一所述受电线圈的位置被预先标定;
10.供电时,所述两个送电线圈分别对应与所述车载端所处位置处的受电线圈形成电磁感应,且在对应的所述受电线圈中产生感应电流;
11.所述接收器配置为用于解析所述感应电流和磁场振动共振频率;所述译码器配置为分别得到产生电磁感应的受电线圈的相应的xy坐标;所述数据发送装置配置为接收所述译码器发送的所述xy坐标信息;
12.当车载端自动驶过室内某一位置时,控制模块根据不同的振动频率判断出两个送电线圈的坐标位置,并根据两个所述送电线圈到所述车载端重心的距离加权得到所述车载端的重心的位置,且根据所述两个送电线圈的坐标位置计算获取所述车载端的航向。
13.优选地,所述车载端送电线圈组还包括:
14.数据接收装置,其配置为用于接收所述数据发送装置发送的产生电磁感应的受电线圈的坐标位置以及对应的振动频率;
15.所述控制模块内置于所述数据接收装置内或者所述数据接收装置与所述控制模块电连。
16.优选地,还包括与两个所述送电线圈对应电路连接的振荡器。
17.优选地,令所述两个送电线圈距离所述车载端的重心位置的距离分别为l1和l2;
18.当所述车载端驶过某一位置时,令分别与两个送电线圈产生电磁感应的两个受电线圈的位置为p
m1,n1
和p
m2,n2
,则有:
19.加权得到的所述车载端的重心的位置p为:p=k1*p
m1,n1
+k2*p
m2,n2
;其中,
20.优选地,令分别与两个送电线圈产生电磁感应的两个受电线圈的位置为p
m1,n1
=(x1,y1)和p
m2,n2
=(x2,y2),则有:
21.所述车载端的航向为
22.优选地,所述数据接收装置设置在所述车载端上。
23.优选地,所述路侧受电线圈组中的所有受电线圈的间隔相等。
24.优选地,所述车载端启动时,所述车载送电线圈组中的两个送电线圈均供电。
25.本发明还有一个目的在于提供上述的基于电磁网格的室内定位系统的定位方法,包括如下步骤:
26.s1、在室内地面铺设好路侧受电线圈组,并对每个受电线圈标定,以确定每个受电线圈的位置;
27.s2、当车载端自动驶过某一位置时,
28.s21、获取该位置处产生感应电流的受电线圈的xy坐标;
29.s22、计算得到该位置处车载端的重心的位置及航向,实现车载端的室内定位。
30.优选地,步骤s21中:
31.接收器解析产生电磁感应的受电线圈的感应电流和磁场振动频率,并通过译码器得到相应的受电线圈的xy坐标。
32.优选地,步骤s22中:
33.s221、数据接收装置接收产生电磁感应的受电线圈的位置和对应的振动频率,判断得到两个送电线圈的位置;
34.s222、根据两个送电线圈到车载端的重心位置的距离,加权得到该位置处车载端的重心的位置;且根据对应的两个送电线圈的位置获取车载端的航向。
35.与现有技术相比,本发明的优点是:
36.本发明的基于电磁网格的室内定位系统,通过在车载端的车头和车尾分别布置一个送电线圈,并在室内地面铺设形成电磁网格的受电线圈组,利用电磁感应效应和磁场共振原理,实现高精度可靠性的定位效果,解决现有技术中室内定位成本高和定位漂移的问题。
附图说明
37.下面结合附图及实施例对本发明作进一步描述:
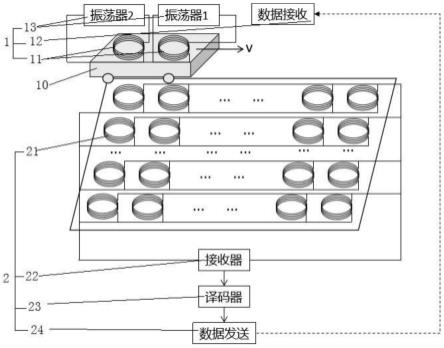
38.图1为本发明实施例的基于电磁网格的室内定位系统的结构示意图;
39.图2为本发明实施例的基于电磁网格的室内定位系统的车载送电线圈组的结构示意图。
40.其中:1、车载送电线圈组;10、车载端;11、送电线圈;12、数据接收装置;13、振荡器;2、路侧受电线圈组;21、受电线圈;22、接收器;23、译码器;24、数据发送装置。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
42.实施例:
43.需要说明,若本发明的实施例中有涉及方向性指示(诸如上、下、第一、第二、前、后
……
),则该方向性指示仅用于解释在某一特定姿态下各部件之间的相对关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
44.另外,若本发明中涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性可者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
45.参见图1至图2,本发明实施例的一种基于电磁网格的室内定位系统,包括车载送电线圈组1、路侧受电线圈组2和控制模块(未示出)。其中车载送电线圈组1包括两个送电线圈11和数据接收装置12。路侧受电线圈组2包括有若干送电线圈21、接收器22、译码器23和数据发送装置24。
46.车载送电线圈组1的两个送电线圈11中的一个设于车载端10比如现有常规的用于室内搬运的agv小车的车头、另一个设于车载端10的车尾。两个送电线圈11均由车载端10供电。优选地,每个送电线圈11均电路连接有一个振荡器13,两个送电线圈11的振动频率不一样,根据电磁场共振原理,从而可以方便后续区分判断两个送电线圈11分别对应的受电线圈21,从而便于计算确认车载端10的定位位置。具体的,如图2所示,其中一个送电线圈11布置在车载端10的车头底部中间位置,另一个送电线圈11布置在车载端10的车尾底部中间位置,两个送电线圈11均与车载端10电连接,具体的,当车载端10启动时,两个送电线圈11即供电。也就是说两个送电线圈11只有在车载端10启动时才会工作,高效安全。
47.路侧受电线圈组2包括有多个受电线圈21,具体数量不做限定和描述,根据被布置的室内地面面积而定。具体的,多个受电线圈21纵横交叉间隔布置在室内地面上以形成线圈网格。需要说明的是,为了便于后续计算确认车载端10的重心的位置和航向以实现车载端10的精准定位,在安装好地面的路侧受电线圈组2后,需要对每一个送电线圈21的位置进
行标定,以确定每个送电线圈21的具体位置,并保存在文件中。用p
m,n
=(x,y)(m≥1,n≥1的自然数)表示任一送电线圈21的位置,本实施例中以横向100个送电线圈21、竖向150个送电线圈21,总计15000个送电线圈(即1≤m≤150,1≤n≤100)为例进行说明,从而路侧受电线圈组2中所有的送电线圈21的位置可以表示如下:
[0048][0049]
对于每个送电线圈21的间隔而言,不做特别限定,主要视室内地面的面积而定,比如间隔10cm、20cm等等。本发明的一些实施例中,假设某厂区地面面积为30m*20m,设电磁场网格精度为20cm,则路侧受电线圈组2中受电线圈21的数量为(30
÷
0.2)*(20
÷
0.2)=15000)个。
[0050]
本发明实施例的定位系统,当车载送电线圈组1中的两个送电线圈11供电时,根据电磁感应效应,两个送电线圈11分别对应与车载端10所处位置处具体为与送电线圈11最近位置处的受电线圈21形成电磁感应,且在受电线圈21中产生感应电流。
[0051]
接收器22为现有技术中常规的接收装置,配置为与所有的受电线圈21电连接比如电路连接,用于解析感应电流和磁场振动共振频率。译码器23同理为现有技术中常规的译码器,可以为接收器22的组成部分,也可以为单独的译码器,本发明实施例中采用的是译码器与接收器为单独的设备,两者电连接比如电路连接或无线通讯连接,其配置为分别得到产生电磁感应的受电线圈21的相应的位置也即xy坐标。数据发送装置24比如现有技术中常规的无线数据发送装置或电磁数据发送装置,其和译码器23连接比如无线通讯连接,配置为接收译码器23发送的受电线圈21的xy坐标信息并将其发送至数据接收装置12,数据接收装置12比如现有技术中常规的无线数据接收器与数据发送装置24无线连接且配置为用于接收产生电磁感应的受电线圈的坐标位置以及对应的磁针的振动频率。数据接收装置12内置有控制模块(比如控制模块为数据接收装置12的内置控制芯片)或者数据接收装置12与车载端10的控制器(控制器为上述的控制模块)电连接(此情况,可将数据接收装置12设置在车载端上)或者控制模块为外界设备,与数据发送模块24无线连接(此情况下,可以不设置数据接收装置12),控制模块或控制器可以存储标定的路侧线圈组2的受电线圈21的标定位置,该控制模块可以根据接收到的受电线圈21的坐标位置和共振频率判断出两个送电线圈11也即车头和车尾的坐标位置(由于两个送电线圈11分别设置在车头和车尾且两者的频率不同,根据电磁场共振原理,从而可以根据振动频率的不同判断两个受电线圈21分别对应的送电线圈11,结合译码器23得到的受电线圈21的位置来准确的判断出车载端10的车头和车尾的位置)。并根据两个送电线圈11到车载端10的重心的距离加权得到车载端10驶过室内某一位置时的车载端10的重心的位置,且根据两个送电线圈11的坐标位置计算获取车载端10的航向。基于电磁感应效应和电磁共振原理,通过获取确认车载端10的重心的位置以及航向来实现室内车载端10的精准定位。本发明的优选实施例中,数据接收装置12布置在车载端10。对于接收器22、译码器23、数据发送装置24和数据接收装置12的具体结构和工作原理在此不做特别限定和描述,均为现有常规的设备。根据本发明的一些实施例,车载送
电线圈组1不包括有数据接收装置12。
[0052]
更具体的,令两个送电线圈11距离车载端10的重心位置的距离分别为l1和l2,l1和l2为已知。当车载端10驶过某一位置时,令分别与两个送电线圈11产生电磁感应的两个受电线圈21的位置为p
m1,n1
和p
m2,n2
,则有:
[0053]
加权得到的车载端10的重心的位置p为:p=k1*p
m1,n1
+k2*p
m2,n2
;其中,0≤k1≤1,0≤k2≤1。由于l1和l2为已知,两个受电线圈21的位置事先也被标定,故而也是已知,因此,只需直接代入即可计算得到车载端10的重心的位置。需要说明的是,l1和l2可以相等也可以不相等,一种优选地的实施例中,l1和l2相等,则有系数k1和k2均为0.5,则有p=0.5*p
m1,n1
+0.5*p
m2,n2
。
[0054]
根据本发明的一些实施例,令分别与两个送电线圈11产生电磁感应的两个受电线圈21的位置为p
m1,n1
=(x1,y1)和p
m2,n2
=(x2,y2),则有:
[0055]
车载端10的航向为由于两个受电线圈21的位置事先标定,故而航向中x1、x2、y1和y2的数值均为已知,因此,只需代入即可计算得到车载端10的航向。
[0056]
本发明实施例的室内定位系统,基于电磁网格,通过电磁感应效应和磁场共振原理,实现车载端在室内高精度高可靠性的定位效果,解决了现有技术中室内定位成本高或者定位漂移也即定位精度低的问题,本发明实施例的室内定位系统成本低,定位精度高且高效安全,仅仅在车载端启动时才会工作。
[0057]
本发明实施例还提供了一种上述实施例中的室内定位系统的定位方法,包括如下步骤:
[0058]
s1、在室内地面铺设好路侧受电线圈组2,并对每个受电线圈21标定,以确定每个受电线圈21的位置;
[0059]
s2、当车载端10自动驶过某一位置时,
[0060]
s21、获取该位置处产生感应电流的受电线圈21的xy坐标;
[0061]
s22、计算得到该位置处车载端10的重心的位置及航向,实现车载端10的室内定位。
[0062]
具体的,步骤s21中:
[0063]
接收器22解析产生电磁感应的受电线圈21的感应电流和磁场振动频率,并通过译码器23得到相应的受电线圈21的xy坐标。具体描述如上述实施例,在此不再赘述。
[0064]
具体的,步骤s22中:
[0065]
s221、数据接收装置12接收产生电磁感应的受电线圈21的位置和对应的振动频率,判断得到两个送电线圈11的位置;
[0066]
s222、根据两个送电线圈11到车载端的重心位置的距离,加权得到该位置处车载端10的重心的位置;且根据对应的两个送电线圈11的位置获取车载端10的航向。具体描述如上述实施例,在此不再赘述。
[0067]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨
在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1