一种供水管道检漏装置及方法
1.本发明涉及供水管网维保技术领域,尤其涉及一种供水管道检漏装置及方法。
背景技术:
2.如果供水管道泄漏可以被及时且准确地检测,将会节约大量水资源,因此近年来众多学者针对供水管网泄漏检测做了大量研究,形成了红外检漏,气体检漏,综合数据检漏,声学检漏等研究方向,其中因声学检漏较为经济可行而得到了长足的发展,产生了一些具备创新性的专利。
3.专利cn201429491y公布了一种供水管网泄漏检测仪,技术人员携带该仪器,将拾音探头贴在地面沿管道走向探测,通过分析拾音探头采集到的信号,确定漏水点位置。该方法的不足之处在于其拾音探头处于地面上,如果水管埋深过大则无法采集到足够强的漏水信号,同时拾音探头很容易受地面上的其他干扰信号所影响,无法在嘈杂环境中很好使用。
4.专利cn107218514a公布了一种城市管网泄漏检测定位球,这种定位球内集成了水听器和惯导模块,将定位球投入管道,定位球会随着水流流动并且记录沿途的声信号,在管道另一端取出定位球,通过分析其记录的声信号和惯导模块记录的位移数据定位泄漏点。该方法不足之处在于应用时需要关闭所有支管保证定位球流向,以及容易发生卡球等问题。
5.专利cn107940244a公布了一种供水管网泄漏检测系统和方法,该系统将振动传感器用磁吸方式布设水管两端外壁上,监测水管的振动,对收集到的振动数据进行相关性分析得出泄漏点处漏水振动传播到水管左右两端的时间差,得到泄漏点位置。该方法的不足之处在于外界干扰也会引起管壁振动引起系统误判,导致检测成功率和精确度降低。
6.因此,本领域的技术人员致力于开发一种供水管道检漏装置及方法。
技术实现要素:
7.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是供水管网泄漏点不能准确定位、外界声音干扰影响定位精度或造成系统漏报误报。
8.发明人分析,现有技术一般采用单个声压水听器测量声压标量,存在声压水听器固有的左右舷模糊、对各向同性环境噪声敏感等问题,且现有方法在水管两端都只布设单个水听器,将收集到的信号滤波后直接进行相关分析,无法判断声源是否是水管漏水声,也无法通过波束形成将波束锁定到水管方向上,导致其分辨能力差、易受外界声源干扰,造成虚警或漏警。发明人经研究发现,同时测量声音的声压标量和质点振速矢量,可以克服左右舷模糊,具备抗各向同性环境噪声能力,多个矢量水听器组成阵列具有波束形成能力,可以增强感兴趣方向信号,抑制无用干扰和噪声,同时带来更高的信号增益和空间分辨能力。
9.本发明的一个实施例中,提供了一种供水管道检漏装置,包括:
10.矢量水听器阵列模块一,为至少六个矢量水听器阵元子模块组成的均匀线阵,记录供水管道一端的声信号数据;
11.矢量水听器阵列模块二,为至少六个矢量水听器阵元子模块组成的均匀线阵,记录供水管道另一端的声信号数据;
12.定位模块一,接收定位系统信号,记录矢量水听器阵列模块一的地理位置;
13.定位模块二,接收定位系统信号,记录矢量水听器阵列模块二的地理位置;
14.中央处理模块,对矢量水听器阵列模块一和矢量水听器阵列模块二监测到的的声信号数据进行提取、分析和运算,最终计算出泄漏点到矢量水听器阵列模块的距离;
15.通信模块一:向中央处理模块发送矢量水听器阵列模块一监测到的声信号数据以及定位模块一监测到的地理位置数据;
16.通信模块二:向中央处理模块发送矢量水听器阵列模块二监测到的声信号数据以及定位模块二监测到的地理位置数据;
17.矢量水听器阵列模块一和矢量水听器阵列模块二设置在供水管道两端的管内壁,定位模块一和通信模块一安装在与矢量水听器阵列模块一对应的供水管道的管外壁,定位模块二和通信模块二安装在与矢量水听器阵列模块二对应的供水管道的管外壁,矢量水听器阵列模块一和定位模块一通过有线方式连接到通信模块一,矢量水听器阵列模块二和定位模块二通过有线方式连接到通信模块二,通信模块一和通信模块二通过无线方式与中央处理模块进行通信。
18.可选地,在上述实施例的供水管道检漏装置中,矢量水听器阵元子模块包括一个声压传感器和三个质点振速传感器,声压传感器测量附近声场的声压,质点振速传感器测量附近声场不同方向上的质点振速。
19.进一步地,在上述实施例的供水管道检漏装置中,中央处理模块包括:
20.信号处理子模块,响应于所述通信模块一和通信模块二发送的声信号数据,对声信号数据进行预处理,然后发送给声源个数估计子模块;
21.声源个数估计子模块,接收经过信号处理子模块预处理的声信号数据,并进行声源个数估计,并把估计结果发送给波达方向估计子模块;
22.波达方向估计子模块,利用声源个数估计子模块的估计结果对声信号数据进行波达方向估计,得到所有声源的来波方向,分析供水管道方向上的漏水声信号;
23.波束形成子模块,对预处理的声信号数据进行波束形成,将波束方向汇聚到供水管道所在直线方向上,以屏蔽外界其他声源的干扰;
24.滤波子模块,对经过波束形成的声信号数据进行滤波,去除声信号数据中的环境噪声,提高泄漏点位置估计的准确性;
25.时延估计子模块,对滤波后的声信号进行相关性分析,计算得出泄漏点漏水声信号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差,计算泄漏点位置。
26.进一步地,在上述实施例的供水管道检漏装置中,声源个数估计采用最小长度描述算法(mdl,minimum description length criterion)。
27.进一步地,在上述实施例的供水管道检漏装置中,波达方向估计采用二维旋转不变子空间算法(2-d esprit)。
28.进一步地,在上述实施例的供水管道检漏装置中,波束形成采用 lcmv波束形成算法。
29.进一步地,在上述实施例的供水管道检漏装置中,滤波采用小波变换算法
(wavelet transform)。
30.进一步地,在上述实施例的供水管道检漏装置中,相关性分析采用算法为广义互相关算法(gcc)。
31.可选地,在上述任一实施例的供水管道检漏装置中,定位系统选择北斗或gps。
32.基于上述实施例,本发明的另一个实施例中,提供了一种供水管道检漏方法,包括如下步骤:
33.s100、部署供水管道检漏装置,在供水管道两端内壁安装矢量水听器阵列模块一和矢量水听器阵列模块二,并在供水管道两端外壁配套安装定位模块一、定位模块二和通信模块一、通信模块二,以及中央处理模块;
34.s200、启动供水管道检漏装置,矢量水听器阵列模块一、矢量水听器阵列模块二、定位模块一、定位模块二、通信模块一、通信模块二和中央处理模块开始工作;
35.s300、预处理声信号数据,中央处理模块接收声信号数据信息,并进行预处理;
36.s400、估算声源个数,声源个数估计子模块接收预处理的声信号数据,并进行声源个数估计;
37.s500、估算声源的来波方向,波达方向估计子模块进行波达方向估计,得到所有声源的来波方向,判断供水管道方向上的漏水声信号,如果有漏水,则执行s600,否则返回s300;
38.s600、形成波束,波束形成子模块进行波束形成,将波束方向汇聚到供水管道所在直线方向上,以屏蔽外界其他声源的干扰;
39.s700、滤波,滤波子模块对声信号数据进行滤波,去除声信号数据中的环境噪声;
40.s800、计算泄漏点位置,时延估计子模块对滤波后的声信号数据进行相关性分析,计算得出漏水声信号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差,计算泄漏点位置;
41.s900、显示并保存结果,中央处理模块显示并保存定位模块一、定位模块二的定位数据和泄漏点位置。
42.可选地,在上述任一实施例的供水管道检漏方法中,步骤s300包括:
43.s310、中央处理模块接收通过通讯模块一和通信模块二发送来的矢量水听器阵列模块一、矢量水听器阵列模块二的声信号数据;
44.s320、信号处理子模块对上述声信号数据进行解包和预处理;
45.s330、把预处理的声信号数据传送到声源个数估计子模块。
46.可选地,在上述任一实施例的供水管道检漏方法中,步骤s400包括:
47.s410、声源个数估计模块接收预处理的声信号数据;
48.s420、对声源个数进行估计;
49.s430、把预处理的声信号数据传送到波达方向估计子模块。
50.进一步地,在上述实施例的供水管道检漏方法中,步骤s420中对声源个数进行估计采用最小长度描述算法(mdl,minimum description lengthcriterion)。
51.可选地,在上述任一实施例的供水管道检漏方法中,步骤s500包括:
52.s510、波达方向估计子模块接收预处理的声信号数据;
53.s520、波达方向估计,如果出现来自供水管道方向的漏水声信号,则把预处理的声
信号数据传送到波束形成子模块,执行s600;
54.s530、如果没有出现来自供水管道方向的漏水声信号,就结束本轮处理,返回s300重新监测。
55.进一步地,在上述实施例的供水管道检漏方法中,步骤s520中波达方向估计采用二维旋转不变子空间算法(2-d esprit)。
56.可选地,在上述任一实施例的供水管道检漏方法中,步骤s600包括:
57.s610、波束形成子模块接收预处理的声信号数据;
58.s620、进行波束形成,将波束方向汇聚到供水管道所在直线方向上,屏蔽外界其他声源的干扰;
59.s630、将波束形成后的声信号数据传送到滤波子模块。
60.进一步地,在上述实施例的供水管道检漏方法中,步骤s620中波束形成采用lcmv波束形成算法。
61.可选地,在上述任一实施例的供水管道检漏方法中,步骤s700包括:
62.s710、滤波子模块接收到经过波束形成的声信号数据;
63.s720、对经过波束形成的声信号数据滤波,去除信号中的环境噪声;
64.s730、将滤波后的声信号数据传送到时延估计子模块。
65.进一步地,在上述实施例的供水管道检漏方法中,步骤s720中滤波采用小波变换算法(wavelet transform)。
66.可选地,在上述任一实施例的供水管道检漏方法中,步骤s800包括:
67.s810、时延估计子模块接收经过滤波后的声信号数据;
68.s820、相关性分析,计算漏水声信号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差;
69.s830、根据水中声速计算泄漏点位置;
70.s840、定位模块将矢量水听器阵列模块一和矢量水听器阵列模块二的定位数据发送给中央处理系统。
71.进一步地,在上述实施例的供水管道检漏方法中,步骤s820中相关性分析采用广义互相关算法(gcc)。
72.本发明使用矢量水听器同时测量声音的声压标量和质点振速矢量,克服了左右舷模糊,具备抗各向同性环境噪声能力。使用至少六个矢量水听器组成阵列,具有波束形成能力,增强了感兴趣方向信号,抑制了无用干扰和噪声,同时带来了更高的信号增益和空间分辨能力。本发明解决了供水管网泄漏点不能准确定位、外界声音干扰影响定位精度或造成系统漏报误报等问题,提高了供水管网泄漏检测的准确性和稳健性。
73.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
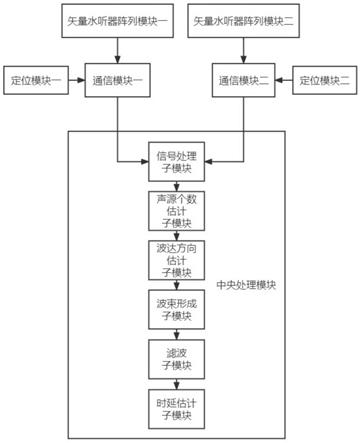
74.图1是图示根据示例性实施例的供水管道检漏装置结构示意图;
75.图2是图示根据示例性实施例的供水管道检漏方法的流程图。
具体实施方式
76.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
77.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方示意性地适当夸大了部件的厚度。
78.发明人设计了一种供水管道检漏装置,如图1所示,包括:
79.矢量水听器阵列模块一,为至少六个矢量水听器阵元子模块组成的均匀线阵,记录供水管一端的声信号数据;
80.矢量水听器阵列模块二,为至少六个矢量水听器阵元子模块组成的均匀线阵,记录供水管另一端的声信号数据;
81.上述矢量水听器阵元子模块包括一个声压传感器和三个质点振速传感器,声压传感器测量附近声场的声压,质点振速传感器测量附近声场不同方向上的质点振速;
82.定位模块一,接收定位系统信号,记录矢量水听器阵列模块一的地理位置;定位系统选择北斗或gps;
83.定位模块二,接收定位系统信号,记录矢量水听器阵列模块二的地理位置;定位系统选择北斗或gps;
84.通信模块一:向中央处理模块发送矢量水听器阵列模块一监测到的声信号数据以及定位模块一监测到的地理位置数据;
85.通信模块二:向中央处理模块发送矢量水听器阵列模块二监测到的声信号数据以及定位模块二监测到的地理位置数据;
86.中央处理模块,对矢量水听器阵列模块一和矢量水听器阵列模块二监测到的的声信号数据进行提取、分析和运算,最终计算出泄漏点到矢量水听器阵列模块的距离;中央处理模块包括:
87.信号处理子模块,响应于所述通信模块一和通信模块二发送的声信号数据,对声信号数据进行预处理,然后发送给声源个数估计子模块;
88.声源个数估计子模块,接收经过信号处理子模块预处理的声信号数据,并进行声源个数估计,并把估计结果发送给波达方向估计子模块,声源个数估计采用最小长度描述算法(mdl,minimum description length criterion);
89.波达方向估计子模块,利用声源个数估计子模块的估计结果对声信号数据进行波达方向估计,得到所有声源的来波方向,分析供水管道方向上的漏水声信号;波达方向估计采用二维旋转不变子空间算法 (2-d esprit);
90.波束形成子模块,对预处理的声信号数据进行波束形成,将波束方向汇聚到供水管道所在直线方向上,以屏蔽外界其他声源的干扰;波束形成采用lcmv波束形成算法;
91.滤波子模块,对经过波束形成的声信号数据进行滤波,去除声信号数据中的环境噪声,提高泄漏点位置估计的准确性;滤波采用小波变换算法(wavelet transform);
92.时延估计子模块,对滤波后的声信号进行相关性分析,计算得出泄漏点漏水声信
号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差,计算泄漏点位置;相关性分析采用广义互相关算法 (gcc)。
93.矢量水听器阵列模块一和矢量水听器阵列模块二设置在供水管道两端的管内壁,定位模块一和通信模块一安装在与矢量水听器阵列模块一对应的供水管道的管外壁,定位模块二和通信模块二安装在与矢量水听器阵列模块二对应的供水管道的管外壁,矢量水听器阵列模块一和定位模块一通过有线方式连接到通信模块一,矢量水听器阵列模块二和定位模块二通过有线方式连接到通信模块二,通信模块一和通信模块二通过无线方式与中央处理模块进行通信。
94.基于上述实施例,发明人提供了一种供水管道检漏方法,如图2所示,包括如下步骤
95.s100、部署供水管道检漏装置,在供水管道两端内壁安装矢量水听器阵列模块一和矢量水听器阵列模块二,并在供水管道两端外壁配套安装定位模块一、定位模块二和通信模块一、通信模块二,以及中央处理模块;
96.s200、启动供水管道检漏装置,矢量水听器阵列模块一、矢量水听器阵列模块二、定位模块一、定位模块二、通信模块一、通信模块二和中央处理模块开始工作;
97.s300、预处理声信号数据,中央处理模块接收声信号数据信息,并进行预处理;具体包括:
98.s310、中央处理模块接收通过通讯模块一和通信模块二发送来的矢量水听器阵列模块一、矢量水听器阵列模块二的声信号数据;
99.s320、信号处理子模块对上述声信号数据进行解包和预处理;
100.s330、把预处理的声信号数据传送到声源个数估计子模块。
101.s400、估算声源个数,声源个数估计子模块接收预处理的声信号数据,并进行声源个数估计;具体包括:
102.s410、声源个数估计模块接收预处理的声信号数据;
103.s420、对声源个数进行估计,采用最小长度描述算法(mdl, minimum description length criterion);
104.s430、把预处理的声信号数据传送到波达方向估计子模块。
105.s500、估算声源的来波方向,波达方向估计子模块进行波达方向估计,得到所有声源的来波方向,判断供水管道方向上的漏水声信号,如果有漏水,则执行s600,否则返回s300;具体包括:
106.s510、波达方向估计子模块接收预处理的声信号数据;
107.s520、波达方向估计,采用二维旋转不变子空间算法(2-d esprit),如果出现来自供水管道方向的漏水声信号,则把预处理的声信号数据传送到波束形成子模块,执行s600;
108.s530、如果没有出现来自供水管道方向的漏水声信号,就结束本轮处理,返回s300重新监测。
109.s600、形成波束,波束形成子模块进行波束形成,将波束方向汇聚到供水管道所在直线方向上,以屏蔽外界其他声源的干扰;具体包括:
110.s610、波束形成子模块接收预处理的声信号数据;
111.s620、进行波束形成,采用lcmv波束形成算法,将波束方向汇聚到供水管道所在直
线方向上,屏蔽外界其他声源的干扰;
112.s630、将波束形成后的声信号数据传送到滤波子模块。
113.s700、滤波,滤波子模块对声信号数据进行滤波,去除声信号数据中的环境噪声;具体包括:
114.s710、滤波子模块接收到经过波束形成的声信号数据;
115.s720、对经过波束形成的声信号数据滤波,采用小波变换算法(wavelet transform),去除信号中的环境噪声;
116.s730、将滤波后的声信号数据传送到时延估计子模块。
117.s800、计算泄漏点位置,时延估计子模块对滤波后的声信号数据进行相关性分析,计算得出漏水声信号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差,计算泄漏点位置;具体包括:
118.s810、时延估计子模块接收经过滤波后的声信号数据;
119.s820、相关性分析,采用广义互相关算法(gcc),计算漏水声信号到达矢量水听器阵列模块一和矢量水听器阵列模块二的时间差;
120.s830、根据水中声速计算泄漏点位置;
121.s840、定位模块将矢量水听器阵列模块一和矢量水听器阵列模块二的定位数据发送给中央处理系统。
122.s900、显示并保存结果,中央处理模块显示并保存定位模块一、定位模块二的定位数据和泄漏点位置。
123.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1