一种基于超宽带雷达的身份识别和跌倒检测方法与流程
1.本发明属于雷达检测识别技术领域,具体地说,涉及一种基于超宽带雷达的身份识别和跌倒检测方法。
背景技术:
2.由于人口老龄化的快速增长及其在现代城市引发的众多相关问题,个人健康监护已成为研究人员重点关注的问题。当前迫切需要对家庭中的每个人进行具体健康监测。生物识别技术在安全性和个性化监控方面发挥着重要作用。此外,跌倒这一问题在居家的老年人群体中很常见并且通常会导致骨折或其他严重损伤。如果正确识别跌倒人员的身份,可以及时向其监护人或护工发出警告以避免造成严重损伤。因此,在居家环境中进行身份识别和跌倒检测能够及时预警跌倒事件,对避免严重损伤具有重大意义。
3.有鉴于此特提出本发明。
技术实现要素:
4.本发明要解决的技术问题在于克服现有技术的不足,提供一种基于超宽带雷达的身份识别和跌倒检测方法((maerif),以有效实现身份识别和跌倒检测,通过提取雷达回波信号中目标的呼吸特征、体态特征和运动特征的多模态特征,应用随机森林进行身份识别;通过基于近似熵的跌倒事件检测方法,检测跌倒事件引起的时间连续信号中的信号复杂度变化。
5.为解决上述技术问题,本发明采用技术方案的基本构思是:
6.一种基于超宽带雷达的身份识别方法,包括以下步骤:
7.步骤1,ir-uwb雷达采集雷达回波信号并预处理;
8.步骤2,根据呼吸周期动态分割信号,经过高斯滤波后,峰值检测得到波峰和波谷,两个波谷之间的时间定义为一个呼吸周期,获取目标的呼吸特征;
9.步骤3,从雷达回波信号包络中提取一些特征来描述目标雷达散射截面(rcs),即目标的体态特征;
10.步骤4,根据雷达获取的时变距离信息,提取距离、速度和加速度的均值和方差作为目标运动特征进行身份识别。
11.步骤5,根据目标的呼吸特征、体态特征和运动特征,结合随机森林算法进行身份识别。
12.进一步地,所述雷达回波信号主要包含人体产生的微动调制信号,ir-uwb雷达发射和接收一次脉冲定义为一次雷达扫描,接收到的雷达信号被建模为:
[0013][0014]
其中,i表示从发射端到接收端的第i路信号,表示人体微动回波信号的幅度,t
表示慢时间,τ表示快时间,δ表示狄拉克雷脉冲,res(d,t)表示场景中静态背景物体的回波。
[0015]
进一步地,步骤1中预处理的具体过程:
[0016]
101,从接收信号中减去平均值,去除原始雷达信号的直流(dc)和背景平稳杂波;
[0017]
102,进行带通滤波,以减少不必要的成分,提高信噪比(snr);
[0018]
103,继续采用基于时域滑动平均的方法来抑制噪声。
[0019]
进一步地,所述呼吸特征包括:呼吸速率fr、呼气与吸气的持续时间te、胸部收缩的强度ic与舒张的强度ir、胸部收缩的速度vc与舒张的速度vr、胸部收缩的加速度ac与舒张的加速度ar。
[0020]
进一步地,高斯滤波识别呼吸信号模式:
[0021][0022]
其中,高斯窗w(m-t)以时间t为对称中心,σ为窗口扩展因子。
[0023]
进一步地,目标运动特征提取采用主成分分析(pca)方法:
[0024]
将mn
×
3={sd,sv,sa}这三个值组成一个矩阵,矩阵mn
×
3的协方差矩阵cm由下式定义,
[0025]cm
=mm
t
[0026]cm
v=vλ
[0027]
通过协方差矩阵计算特征值(λ)和特征向量(v);其中,sd,sv,sa分别代表一段时间内的距离、速度和加速度;λ={λ1,λ2,λ3},v={v1,v2,v3}。
[0028]
如上述一种基于超宽带雷达的身份识别方法在跌倒检测中的应用,跌倒检测的具体过程:
[0029]
步骤1,根据雷达信号中能量最大值所在位置确定目标位置;
[0030]
步骤2,使用卡尔曼滤波来平滑目标位置随时间的变化并得到时间序列信号;
[0031]
步骤3,将时间序列信号划分为大小相等的窗口进行检测,计算每个窗口片段的近似熵;
[0032]
步骤4,如果熵的局部最小值小于固定阈值,则认为跌倒事件的发生;否则被视为噪音或杂波。
[0033]
采用上述技术方案后,本发明与现有技术相比具有以下有益效果。
[0034]
本发明通过提取雷达回波信号中目标的呼吸特征、体态特征和运动特征的多模态特征,应用随机森林进行身份识别的平均准确率为86.3%,与其他方法相比准确率更高。通过基于近似熵的跌倒事件检测方法,检测跌倒事件引起的时间连续信号中的信号复杂度变化,跌倒检测准确率为96.53%,为跌倒检测提供新技术。
[0035]
下面结合附图对本发明的具体实施方式作进一步详细的描述。
附图说明
[0036]
附图作为本技术的一部分,用来提供对本发明的进一步的理解,本发明的示意性实施例及其说明用于解释本发明,但不构成对本发明的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以
根据这些附图获得其他附图。在附图中:
[0037]
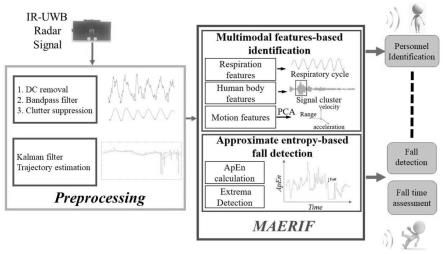
图1maerif总览示意图。
[0038]
图2原始信号与经过高斯滤波后的信号。
[0039]
图3两个目标的距离加速度和速度加速度的点分布。其中,(a)目标1的距离-加速度分布。(b)目标1的速度-加速度分布。(c)目标2的距离-加速度分布。(d)目标2的速度-加速度分布。
[0040]
图4基于卡尔曼滤波的轨迹优化。
[0041]
图5时间序列信号的近似熵。
[0042]
图6实施一中的实验环境。
[0043]
图7 identification results from different classifiers(不同分类器的识别结果)。
[0044]
图8身份识别的混淆矩阵。
[0045]
图9跌倒检测的时延tfd分布。
[0046]
需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
[0047]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
[0048]
在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0049]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0050]
本发明提出maerif方法用于室内环境中的人员的身份识别和跌倒检测,进行身份识别时,对雷达信号进行预处理后,提取了目标的体形、特定运动模式和呼吸周期相关的多模态特征;对于跌倒检测,提出基于近似熵的方法来处理滑动窗口雷达信号,并检测跌倒发生和具体时间,方法总览示意请参见图1。
[0051]
脉冲无线电超宽带(ir-uwb)雷达模型:当ir-uwb雷达探测人体时,雷达回波信号主要包含人体产生的微动调制信号,如心跳、呼吸、体表的随机运动以及周围环境产生的噪声[11,12]。ir-uwb雷达发射和接收一次脉冲可定义为一次雷达扫描。接收到的雷达信号可以被建模为:
[0052]
[0053]
其中i表示从发射端到接收端的第i路信号,表示人体微动回波信号的幅度。t表示慢时间,τ表示快时间,δ表示狄拉克雷脉冲,res(d,t)表示场景中静态背景物体的回波。此外目标的呼吸和心跳活动会导致胸腔的周期性变化。由于多径效应,目标τi(t)的振动被建模为天线到目标距离τd(t)和包含呼吸和心跳谐波的生命体征信号之和,如下:
[0054]
τi(t)=τd(t)+τrcos(2πfrt)+τhcos(2πfht)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0055]
其中,τr是呼吸的振幅,fr是呼吸的频率,τh是心跳的振幅,fh是心跳的频率。脉冲超宽带雷达的信号模型主要包括相对静止目标的反射回波。人体相对静止的躯干和四肢的多径信号包含在res(τ,t)中,可以通过静态杂波滤除来消除其影响。人体呼吸和心跳活动则包含在τi(t)中。根据上述建模,当目标移动时,目标的距离会发生变化,同时肢体也会发生身体运动。通过卡尔曼滤波估计距离的变化。身体的运动会放大雷达信号中的多径干扰,从而导致包括呼吸和心跳在内的胸腔周期性变化的失真。可以通过进一步的预处理和高斯滤波减弱人体运动的干扰,提取呼吸和心跳信号的纯净谐波。
[0056]
基于多模态特征的身份识别和基于近似熵的跌倒检测,具体过程:
[0057]
1.信号预处理
[0058]
接收到的信号被转换成一个二维的m
×
n矩阵,用r[m,n]表示,表示为:
[0059]rm
×n=r(τ=mtf,t=nts),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0060]
其中n=0,1,2,
···
,n-1;m=0,1,2,
···
,m-1;tf表示代表距离维度信息的快速时间采样间隔,ts表示代表时间维度的慢速脉冲持续时间。因此,r为不同时间和距离下的雷达信号回波强度组成的信号矩阵。为了获得目标反射的信号并抑制杂波信号,预处理分为三个步骤。首先,从接收信号中减去平均值,去除原始雷达信号的直流(dc)和背景平稳杂波。然后,进行带通滤波,以减少不必要的成分,提高信噪比(snr)。为了进一步减少剩余的杂波,继续采用基于时域滑动平均的方法来抑制噪声。当人们在房间里随意移动时,目标和雷达之间的距离会不断变化。基于预处理后的雷达信号矩阵^rm
×
n,首先根据矩阵中的最大值确定目标的初始位置。目标的初始位置称为trt。然后使用卡尔曼滤波器估计具有最小均方误差(mmse)的目标位置[13]。首先,误差pt的协方差矩阵由下式确定
[0061][0062]
其中,q是一个影响预测值权重的常数。卡尔曼增益因子kt由常数q和r确定。r是噪声的方差。pt和kt随着时间的推移进行迭代更新。更新后的位置tu由最后的估计值和测量值确定。
[0063]
2.基于多模态特征的身份识别
[0064]
2.1动态分割
[0065]
通过实验数据收集和分析,可以看到雷达信号在时域中表现出周期性,这主要是由式2中的胸腔运动引起的。为了从不同的呼吸周期中提取重复特征,有必要探索一个周期中目标的呼吸模式。同时由于每次呼吸的时间长度是变化的,有必要根据呼吸周期动态分割信号。在提取周期之前,由于杂波的影响,一般很难准确定位一个周期。高斯窗由于其简易有效被应用于滤除杂波,识别呼吸信号模式:
[0066][0067]
高斯窗w(m-t)以时间t为对称中心。σ为窗口扩展因子。
[0068]
图2(a)展示了目标行走时经过预处理后的原始信号。虽然原始信号中可以明显地看到呼吸周期信号,但波形失真太严重,无法自动定位和提取一个呼吸周期以用于后续的特征提取。经过高斯滤波后,峰值检测可以得到波峰和波谷。两个波谷之间的时间定义为一个呼吸周期,用于后续特征提取。信号被分成k段用于特征提取,相邻两段信号没有重叠。
[0069]
2.2.用于身份识别检测的特征提取
[0070]
在室内环境中,家庭成员的体型可能会有所不同。需要从雷达信号中提取出能够代表体型唯一性的相关特征。雷达能够捕捉目标在其视野范围内的反射信号。反射到雷达上的能量称为目标的雷达散射截面(rcs),它是目标的一种特性,是目标将信号反射回雷达的能力的度量。通常,物体越大,反射信号的振幅越大。可以从信号包络中提取一些特征来描述rcs。目标的rcs不仅与目标的距离有关,还与目标的与雷达的方向、角度和目标的体型有关。因此在采集数据时,11个体型各异的目标以不同的方向、角度在室内环境中随机行走以尽可能覆盖多种情况。
[0071]
接收到的雷达信号被分成k段,以保持与多模特征输入的数量一致。考虑到人体的宽度和厚度,提取目标前胸部和后胸部之间15厘米的雷达回波数据用于特征提取。第一组特征是一些常用的统计数据,如均值、方差、偏度、峰值、熵等。另一组特征是区间信号比例、峰值因子、能量、均方根(rms)、边际系数、频率分布等。
[0072]
当目标在房间里自由行走时,不同的个体各有差异。例如,有些目标起步速度快,有些目标起步速度慢,有些目标匀速行走,有些目标行走时会出现停顿。这些运动的差异在雷达回波中都有所体现。根据雷达获取的时变距离信息,计算目标在采集时间内的移动距离、速度和加速度,以确定人体运动模式的特征。在获得目标的距离随时间的变化后,通过一阶导数和二阶导数获得目标的速度和加速度。两个目标运动特性的差异如图3所示。每个点代表目标在这个时间点的特定运动状态,记录了目标随时间的运动状态变化。它们的分布反映了不同目标的运动特性。目标1倾向于有节奏地行走,目标2倾向于平稳地移动。
[0073]
将mn
×
3={sd,sv,sa}这三个值组成一个矩阵,其中sd,sv,sa分别代表一段时间内的距离、速度和加速度。为了更准确地表示不同目标的运动信息,使用主成分分析(pca)方法进行特征提取。具体步骤如下:
[0074]
矩阵mn
×
3的协方差矩阵cm由式6定义,通过协方差矩阵计算特征值(λ)和特征向量(v)。
[0075][0076]
其中λ={λ1,λ2,λ3},v={v1,v2,v3}。特征值是标量值,特征向量则是对应的向量。每个特征向量对应一个代表特征向量长度、大小和其他特征的特征值。因此,特征值用于描述包含在相应特征向量方向上的信息。λ和v表示运动变化的相关性和特异性。此外,还提取距离、速度和加速度的均值和方差作为目标运动特征进行身份识别。
[0077]
另一方面,为了得到更好的人员识别准确率,引入胸腔运动的相关特征。一个完整
的呼吸循环是一个非线性动态过程。除了呼吸,胸腔运动也受心脏的周期性活动的影响。为了更好地提取呼吸周期的个体差异,本发明使用了以下与呼吸相关的特征。
[0078]
1)呼吸速率fr:一般来说,通过对时域信号的快速傅里叶变换(fft)获得的频130谱信息来估计呼吸频率。成年人正常静息时的典型呼吸频率为每分钟12到20次(0.2-0.33赫兹)。
[0079]
2)呼气与吸气的持续时间te,ti:呼气和吸气反应导致胸部的起伏和收缩。胸部的周期性运动在信号的振幅的变化上有所体现。将雷达信号的波峰和波谷视作呼气和吸气的断点,用tp和tt表示相应的时间。因此,持续时间(峰谷之间的时间)为te(n)=tt(n)-tp(n-1),ti(n)=tp(n)-tt(n-1)。
[0080]
3)胸部收缩的强度ic与舒张的强度ir:不同个体之间由于生理差异如肺活量导致呼吸时胸腔振幅不同,通过呼吸从最小峰值到最大峰值的总位移来计算ic和ir。
[0081]
4)胸部收缩的速度vc与舒张的速度vr:通过量化胸部运动在所需时间内的位移计算平均速度。
[0082]
5)胸部收缩的加速度ac与舒张的加速度ar:在一个呼吸循环中,吸气和呼气速度并不是恒定不变的。个体呼吸的收缩与舒张的加速度不同,反映在雷达回波信号中就是曲线的凹凸性和斜率。可以由信号的二阶导数获得这些参数,得到目标在一个呼吸周期中加速度随时间的变化。
[0083]
如表1所示,一共提取46个特征用于身份识别
[0084]
表1.提取的特征
[0085][0086]
3.基于近似熵的跌倒检测
[0087]
3.1.近似熵的方法
[0088]
突然的跌倒事件会导致信号在时间维度上发生突然变化。为了从雷达信号中检测出目标的突然跌倒事件,可以利用时间序列的复杂度和突变度来评估雷达信号的变化。然而当一些非跌倒事件发生时如突然甩手,信号复杂度和振幅的变化在时间维度上也会发生变化。为了解决该问题,本发明提出了基于近似熵[14]的跌倒检测方法。近似熵反映了连续时间序列的自相似程度。近似熵越大,序列越复杂,系统的可预测性越差。
[0089]
对于包含n个样本的时间序列x={x1,x2,x3,...,xn},如下计算x的近似熵:首先,通过重构一组长度为n的时间序列x,得到矩阵y:
[0090][0091]
其中m表示嵌入维数,τ是下采样的延迟时间,m和τ都是人为预设的参数,在本发明所提方法中,分别设置为3和5。
[0092]
对于任意两个向量yi(m)和yj(m),它们之间的距离被定义为对应位置元素之间的最大差值如式8:
[0093][0094]
此时,yi,yj中其他相应元素之间的差异自然小于d。计算每一个i值对应的yi和剩余其他向量yj(j=1,2,
···
,n-m+1)之间的距离。然后定义阈值r=k
×
sd(r》0),它表示类似的容差,也称为过滤级别。在阈值r的定义中,k=0.2,这意味着相似性阈值r的选择约为原始序列标准偏差的0.2倍。之前的研究基于确定性和随机过程的分析,建议在时间序列标准偏差的0.1到0.25倍范围内选择r。在跌倒检测的实验中对数据进行了不同r值的效果测试,最终确定r=0.2能够达到最佳效果。对于每个i,计算d小于r的数量,以及这个数量与n-m+1的比率。
[0095]
然后,取n的对数,计算平均值并重复不同维度m得到:
[0096][0097]
3.2.跌倒事件检测
[0098]
使用卡尔曼滤波来平滑目标位置随时间的变化,如图4,提取^rm
×
n矩阵中生成的时间序列以计算近似熵。
[0099]
为了及时检测跌倒事件的发生,将时间序列信号划分为大小相等的窗口进行检测[32]。图5表示信号的时间序列的近似熵,实际下降时间为6.0秒。从中可以看出近似熵的变化非常显著。更具体地说,雷达的帧率设置为20fps,即20秒的时间序列信号共包含400个样本。从每个20秒时间序列中,选择380个等长时间滑动窗口,相邻窗口之间的重叠率为95%。在整个数据采集过程中,每组数据记录时长为20s的雷达信号,实验对象一开始自由移动,在第10秒到第20秒内的某一个时间点突然跌倒。
[0100]
然后计算每个窗口片段的近似熵ha。ha是每个窗口截取信号的近似熵,相邻窗口之间的重叠率为95%。一个时间序列信号的近似熵的集合可以表示为
[0101]
[0102]
基于熵的方法测量时间序列的复杂性以确定目标状态,被广泛用于eeg疲劳评估、疼痛感知和雷达回波信号定位。与置换熵(permutationentropy)等熵方法相比,近似熵不仅受阶数的影响,还受到信号幅值大小的影响,因此更适合基于雷达信号的跌倒检测。
[0103]
与随机行走时的信号相比,由于速度和运动强度的突然增加,跌倒事件会导致信号的瞬时能量突然上升。跌倒事件结束后,目标会在地上保持静止一小段时间,信号能量迅速下降。在跌倒的过程中,信号回波的变化遵循有序的变化规律,可以通过近似熵的瞬时变化反映出来。当信号随时间变化时,窗口截取信号的近似熵将显著降低。在图5中,可以明显观察到时域信号近似熵的变化。
[0104]
标记l中所有局部极小值。计算出的最小值所在时间点为可能的跌倒时间。有一些局部极小值是由环境中的噪声或杂波引起的误报。可以使用经验阈值来获取有效极值。如果熵的局部最小值小于固定阈值,则认为跌倒事件的发生。否则被视为噪音或杂波。通过检测局部极小值和阈值,及时发现跌倒事件,并防止非跌倒事件的误报。
[0105]
实施例1
[0106]
本发明使用xethrux4m03雷达进行数据采集。图6展示了实验的设备和系统部署。ir-uwb雷达的工作频率为6.0-8.5ghz,能够在0.2到3米的距离上提供0.0067米的高空间分辨率。实验是在雷达传感器前面5
×
5m的区域内进行的。此外,测试大厅中的金属升降门和金属管会产生多径反射信号。雷达放置于地面以上1.3米处。由于需要覆盖跌倒区域,雷达俯仰角约为15度。以每秒20个样本的速率采集回波信号帧。实验的处理终端为一个搭载inteli7-11800h处理器(主频2.3ghz,16核)、nvidiartx3060显卡(显存6gb,192bit位宽)以及内存16gb的笔记本电脑。
[0107]
数据集分为两部分,包括身份识别和跌倒,如图6所示。共有11名健康年轻受试者进行了实验,包括不同性别和体型的受试者,性别比例几乎相同(女性n=6,男性n=5)。受试者的身高在160到187厘米之间,体重在51到85公斤之间,年龄在23到28岁间。
[0108]
在20s的雷达信号中,目标在最初的10s内自由行走然后在距离雷达2米左右处垂直于雷达视线跌倒在体操垫上。采集的跌倒组雷达信号时长均为20s且在后10s内的某个随机时刻跌倒。非跌倒组的时长也为20s,包含目标的一些日常活动如坐、蹲、转身、挥手、躺下。
[0109]
在20秒的雷达信号中,目标在房间里自由行走10秒,然后垂直落在距离雷达2米处。跌倒事件将在最后10秒内的某个时刻随机发生。每个实验对象采集30组数据,包括15个跌倒事件和15个非跌倒事件。在非跌倒事件中,目标将自由行走20秒。共采集160个上述活动的样本。每个样本的持续时间也为20秒。
[0110]
为了证明maerif在身份识别中的有效性,本发明在所采集数据集上与其他方法进行了比较。第一种是基于雷达微多普勒的深度卷积神经网络(dcnn)[23,26]。使用短时傅里叶变换(stft)获取目标的微多普勒特征,将每个微多普勒频谱图的大小调整为227
×
227,持续2秒。将微多普勒频谱图输入到最常用的dcnn网络alexnet,该模型有五个卷积层,两个全连接层。在训练中学习率设置为0.001,共训练200轮。第二种则是直接将雷达信号帧1
×
200作dcnn的输入[27]。共有三层网络,分别由200,150,100个卷积核组成,在每层中添加偏置值并使用relu作为激活函数。最终的分类精度通过三折交叉验证计算。在不同训练集比例下对三种方法区分11个人的身份的效果进行实验,结果如图7。当75%的数据用于训练,
25%用于测试时,maerif在所有分类器中的平均准确率最高,为86.3%。当训练集的比例大于75%时,准确度值相对稳定,marrif的性能也最好。基于python的sklearn软件包得到呼吸特征、体态特征、运动特征等多模态特征的贡献率分别为33.6%、43.7%、22.6%。图8展示了总共11人每个人10个样本的身份识别结果的混淆矩阵。
[0111]
跌倒检测方面,将本发明所提maerif方法与其他基于神经网络的方法比较,包括上述[27]中提出的基于dcnn的方法和另一种常见的深度神经网络(dnn)。所使用的dnn分为三层,一层为雷达信号输入,第二层有200个节点,第三层有100个节点。添加偏置值后使用relu作为激活函数。最后,随机将数据集分成3折,每次使用两折数据用于训练,剩下一折数据于验证。
[0112]
表2不同方法用在跌倒检测方面的性能。从表中可以看出,本发明所提maerif方法具有最高的准确率96.53%,基于神经网络的方法虽然也有较好的识别准确率,然而与maerif相比,神经网络方法需要事先针对目标场景训练数据,不适合快速部署应用于多种实时场景。
[0113]
表2.跌倒检测结果
[0114][0115]
除了准确度,表2中还展示了其他四个指标下各方法的性能比较。灵敏度表示正确识别为跌倒样本与实际跌倒样本的比例(se=tp/(tp+fn))和特异性表示正确识别为非跌倒样本与实际非跌倒样本的比例sp=tn/(fp+tn)。其中真阳性(tp)是系统正确预测跌倒等级的结果;真阴(tn)是系统正确预测非跌倒样本的数量;假阳(fp)是指系统错误预测跌倒样本的数量;假阴(fn)是指系统错误预测非跌倒样本的数量。同时使用300个样本计算了平均预测所需时间和训练所需时间。
[0116]
很少有论文关注跌倒的实时检测,本发明则进行了跌倒检测的时间延迟评估。为了更准确地显示maerif跌倒检测的性能,使用pc控制uwb雷达进行数据采集,并在雷达数据上标记系统时间。同时,基于相同的系统时间,使用视频记录跌倒的特定时刻tfa。maerif的检测到的跌倒时间为tfc。本发明引入tfd作为评估跌倒检测时间延迟的性能指标:tfd=abs(tfc-tfa)。图9展示了基于maerif的跌倒检测时间延迟tfd的概率密度及概率累积分布图,时延范围为0到2.6s,平均为0.75s。
[0117]
本例在实际室内环境中收集了11个目标的数据集,结果表明,身份识别的平均准确率为86.3%,与其他方法相比准确率更高。跌倒检测准确率为96.53%,检测延迟平均值为0.75s。maerif能够有效识别不同的人的身份和检测跌倒事件的发生。在未来的工作中将maerif与生命体征监测相结合,进一步实现个人健康监护。
[0118]
以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1