定位方法、装置、设备及存储介质与流程
本技术实施例涉及导航,特别涉及一种定位方法、装置、设备及存储介质。
背景技术:
1、随着导航技术的发展,需要对移动设备进行定位的应用场景越来越多,如,在配送场景下,需要对配送对象的终端进行定位;在自动驾驶场景下,需要对车载终端进行定位等。
2、相关技术中,根据移动设备安装的卫星定位设备接收的观测数据,实时计算移动设备的定位结果,此种定位方式的定位精度受限于观测数据的质量,在观测数据的质量较差的情况下,极容易出现定位不准确、定位鲁棒性较差的问题,难以满足实际的定位需求。
技术实现思路
1、本技术实施例提供了一种定位方法、装置、设备及存储介质,可用于提高定位准确性以及定位鲁棒性。所述技术方案如下:
2、一方面,本技术实施例提供了一种定位方法,所述方法包括:
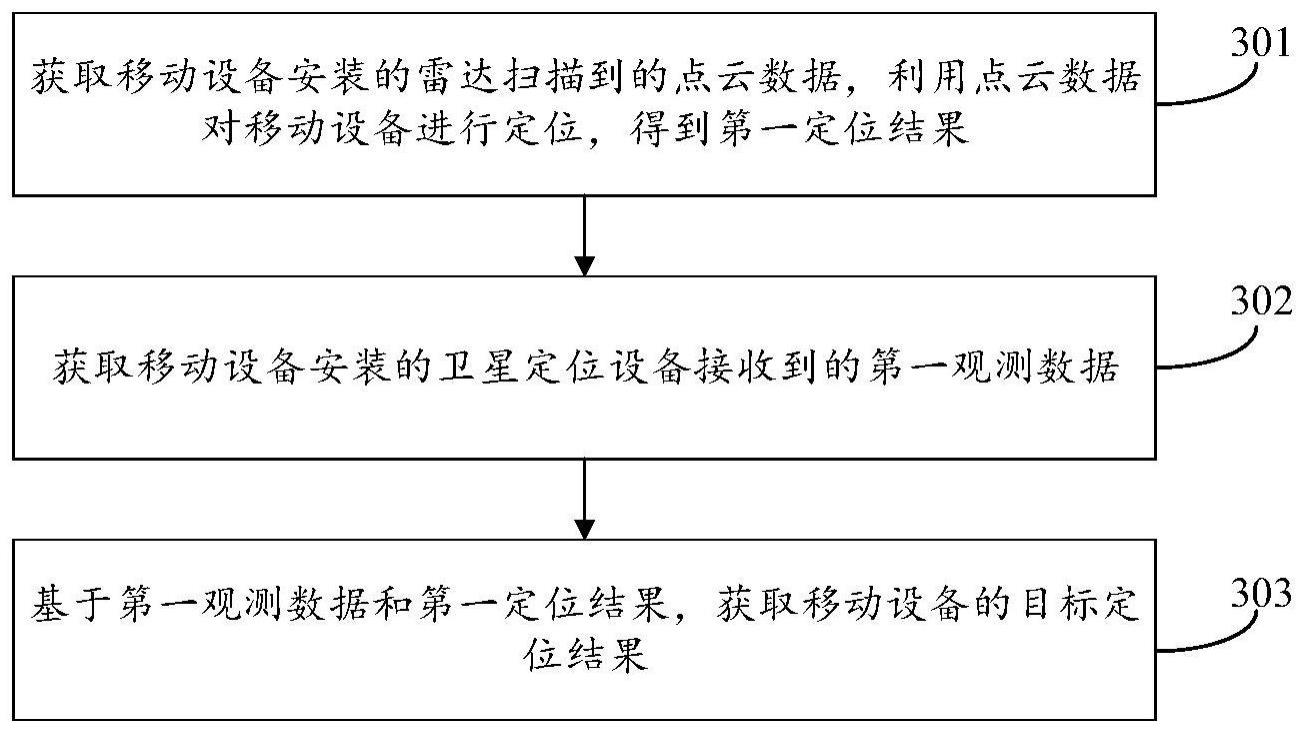
3、获取移动设备安装的雷达扫描到的点云数据,利用所述点云数据对所述移动设备进行定位,得到第一定位结果;
4、获取所述移动设备安装的卫星定位设备接收到的第一观测数据;
5、基于所述第一观测数据和所述第一定位结果,获取所述移动设备的目标定位结果。
6、另一方面,提供了一种定位装置,所述装置包括:
7、第一获取单元,用于获取移动设备安装的雷达扫描到的点云数据;
8、定位单元,用于利用所述点云数据对所述移动设备进行定位,得到第一定位结果;
9、第二获取单元,用于获取所述移动设备安装的卫星定位设备接收到的第一观测数据;
10、第三获取单元,用于基于所述第一观测数据和所述第一定位结果,获取所述移动设备的目标定位结果。
11、在一种可能实现方式中,所述第三获取单元,用于基于所述第一观测数据,获取目标数据,所述目标数据包括所述第一观测数据和双差观测数据中的至少一种,所述双差观测数据基于所述第一观测数据和基准站安装的卫星定位设备接收到的基准观测数据计算得到;基于所述目标数据,在所述第一定位结果的基础上获取所述目标定位结果。
12、在一种可能实现方式中,所述目标数据包括所述第一观测数据和所述双差观测数据,所述第三获取单元,用于利用所述第一观测数据对所述第一定位结果进行修正,得到第一修正结果;利用所述双差观测数据对所述第一修正结果进行修正,得到第二修正结果,将所述第二修正结果作为所述目标定位结果。
13、在一种可能实现方式中,所述第三获取单元,用于基于所述第一定位结果获取第一滤波器的第一状态参数,获取所述第一状态参数对应的第一状态协方差矩阵;响应于所述第一观测数据满足第一筛选条件,基于所述第一观测数据和所述第一状态参数,获取第一观测残差矩阵;确定所述第一观测残差矩阵对应的第一测量更新矩阵和第一测量方差矩阵;基于所述第一观测残差矩阵、所述第一测量更新矩阵、所述第一测量方差矩阵和所述第一状态协方差矩阵,确定第一参数增量,将所述第一参数增量与所述第一状态参数之和,作为所述第一滤波器的更新后的第一状态参数;响应于所述更新后的第一状态参数满足第一参考条件,基于所述更新后的第一状态参数获取所述第一修正结果。
14、在一种可能实现方式中,所述装置还包括:
15、确定单元,用于基于所述第一测量更新矩阵、所述第一测量方差矩阵和所述第一状态协方差矩阵,确定协方差增量,将所述协方差增量与所述第一状态协方差矩阵的乘积,作为更新后的第一状态协方差矩阵;基于所述更新后的第一状态协方差矩阵对所述第一参数增量进行修正量检测;响应于修正量检测通过,基于第一残差协方差矩阵对所述第一观测残差矩阵进行检验,得到所述第一观测残差矩阵中的各个元素分别对应的检验结果,所述第一残差协方差矩阵基于所述更新后的第一状态协方差矩阵、所述第一测量方差矩阵以及所述第一测量更新矩阵构建得到;响应于所述第一观测残差矩阵中的各个元素分别对应的检验结果均满足检验条件,确定所述更新后的第一状态参数满足所述第一参考条件。
16、在一种可能实现方式中,所述确定单元,还用于基于所述第一观测数据、所述第一状态参数和所述第一状态协方差矩阵,确定所述第一滤波器对应的模型验证参数值;响应于所述模型验证参数值小于第一阈值,获取所述第一观测数据中的观测子数据的检验结果,响应于所述第一观测数据中的观测子数据的检验结果均满足保留条件,确定所述第一观测数据满足所述第一筛选条件。
17、在一种可能实现方式中,所述第三获取单元,用于基于所述第一修正结果确定第二滤波器的第二状态参数,获取所述第二状态参数对应的第二状态协方差矩阵;响应于所述双差观测数据满足第二筛选条件,基于所述双差观测数据和所述第二状态参数,获取双差观测残差矩阵;确定所述双差观测残差矩阵对应的双差测量更新矩阵和双差测量方差矩阵;基于所述双差观测残差矩阵、所述双差测量更新矩阵、所述双差测量方差矩阵和所述第二状态协方差矩阵,确定第二参数增量,将所述第二参数增量与所述第二状态参数之和,作为所述第二滤波器的更新后的第二状态参数;响应于所述更新后的第二状态参数满足第二参考条件,基于所述更新后的第二状态参数获取所述第二修正结果。
18、在一种可能实现方式中,所述更新后的第二状态参数包括位置的浮点解和整周模糊度的浮点解,所述第三获取单元,用于对所述整周模糊度的浮点解进行固定;响应于固定成功,利用所述整周模糊度的固定解计算位置的固定解,将包括所述位置的固定解的结果作为所述第二修正结果;响应于未固定成功,将包括所述位置的浮点解的结果作为所述第二修正结果。
19、在一种可能实现方式中,所述目标数据包括所述第一观测数据和所述双差观测数据,所述第三获取单元,用于利用所述第一观测数据对所述移动设备进行定位,得到第二定位结果;利用所述双差观测数据对所述移动设备进行定位,得到第三定位结果;对所述第一定位结果、所述第二定位结果和所述第三定位结果进行融合,将融合得到的结果作为所述目标定位结果。
20、在一种可能实现方式中,所述第三获取单元,用于基于所述第一观测数据对所述移动设备的状态参数进行解算,基于解算得到的状态参数获取所述第二定位结果。
21、在一种可能实现方式中,所述第三获取单元,用于获取所述第一定位结果对应的第一权重、所述第二定位结果对应的第二权重以及所述第三定位结果对应的第三权重;基于所述第一权重、所述第二权重和所述第三权重,对所述第一定位结果、所述第二定位结果和所述第三定位结果进行融合,将融合得到的结果作为所述目标定位结果。
22、在一种可能实现方式中,所述定位单元,用于对所述点云数据和位于所述点云数据前一帧的历史点云数据进行匹配,得到点云匹配信息;基于所述点云匹配信息确定位置变化量;基于所述位置变化量修正所述移动设备的历史位置,得到第一位置,将包括所述第一位置的定位结果作为所述第一定位结果。
23、在一种可能实现方式中,所述目标数据包括所述第一观测数据和所述双差观测数据,所述第三获取单元,用于利用所述双差观测数据对所述第一定位结果进行修正,得到第三修正结果;利用所述第一观测数据对所述第三修正结果进行修正,得到第四修正结果,将所述第四修正结果作为所述目标定位结果。
24、在一种可能实现方式中,所述目标数据包括所述第一观测数据,所述第三获取单元,用于利用所述第一观测数据对所述第一定位结果进行修正,得到第一修正结果,将所述第一修正结果作为所述目标定位结果;或者,利用所述第一观测数据对所述移动设备进行定位,得到第二定位结果,对所述第一定位结果和所述第二定位结果进行融合,将融合得到的结果作为所述目标定位结果。
25、在一种可能实现方式中,所述目标数据包括所述双差观测数据,所述第三获取单元,用于利用所述双差观测数据对所述第一定位结果进行修正,得到第三修正结果,将所述第三修正结果作为所述目标定位结果;或者,利用所述双差观测数据对所述移动设备进行定位,得到第三定位结果,对所述第一定位结果和所述第三定位结果进行融合,将融合得到的结果作为所述目标定位结果。
26、另一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现上述任一所述的定位方法。
27、另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现上述任一所述的定位方法。
28、另一方面,还提供了一种计算机程序产品,所述计算机程序产品包括计算机程序或计算机指令,所述计算机程序或所述计算机指令由处理器加载并执行,以使计算机实现上述任一所述的定位方法。
29、本技术实施例提供的技术方案至少带来如下有益效果:
30、本技术实施例提供的技术方案,移动设备最终的目标定位结果是通过综合考虑移动设备安装的雷达扫描到的点云数据以及卫星定位设备接收到的第一观测数据获取的,点云数据和第一观测数据能够相互补充,此种定位方式能够减弱对点云数据和第一观测数据中的任一种数据的依赖程度,即使在点云数据或第一观测数据的质量较差的情况下,也可以通过额外考虑另一种数据来获取较为准确的目标定位结果,定位鲁棒性较好,有利于满足实际的定位需求。
- 还没有人留言评论。精彩留言会获得点赞!