一种潮汐分汊河段航道整治洲滩用水深测量装置
1.本发明属于水深探测技术领域,涉及一种水深测量装置,特别是一种潮汐分汊河段航道整治洲滩用水深测量装置。
背景技术:
2.潮汐分汊河段航道因为水流中含有泥沙,会淤积在河段中,形成洲滩,严重影响船只航行。
3.就需要对河道堆积淤泥形成的洲滩进行清除,对河道环境进行维护的装置,其对河道淤泥清除较彻底,具有较好的使用价值,可对河道环境进行较好的改善。
4.但是对于洲滩的位置、洲滩的深度就需要进行有效探测,还需要对河流的水深,即河床深度进行检测,保证在整治洲滩时,不影响河床,保证整治施工安全性。
5.目前现有水深探测方法有两种,方法一:准备一根足够长的杆状物,然后在杆子上划上刻度,划船到拟施工区域,将杆子插入水底,通过读取竹竿上的刻度确定水深。这种探测方法在的缺点有:1、在流速较大时,操作较困难;2、在船只上操作,安全风险较大;3、全凭探测人员手感,容易产生误判;4、由于船只体积限制,狭小区域无法水深无法探测;方法二划船到拟施工区域,然后通过超声波探测仪探测水深。这种探测方法在的缺点有:1、在流速较大时,操作较困难;2、在船只上操作,安全风险较大;3、由于船只体积限制,狭小区域无法水深无法探测;4、而且水中还有水草,探测不准确,不能进行大数据分析,进行数学建模。
6.经检索,如中国专利文献公开了一种可伸缩超声波水深探测装置【申请号:cn202020348153.6;公开号:cn211552832u】。这种探测装置,包括一号工作平台和二号工作平台,所述一号工作平台和二号工作平台的上端面分别设置有一号横杆支撑座和二号横杆支撑座,所述一号横杆支撑座和二号横杆支撑座之间内端设置有工作横杆,所述工作横杆的上下两侧壁上均开设有滑动槽,所述滑动槽的中端上下两侧分别设置有上平衡板和下平衡板。虽然该装置能实现对拟探测区域水深实现无死角探测,使用简便,但是,不能有效探测洲滩的位置、洲滩的深度,不能保证在整治洲滩时不影响河床,不能避免水草的影响,不能进行大数据分析,进行数学建模。
7.基于此,我们提出一种的潮汐分汊河段航道整治洲滩用水深测量装置,通过转盘组件和调节支腿配合,实现稳定支撑切割机构、声波探测机构和压力探测机构进行有效转动,切换不同工作状态;
8.通过声波探测机构有效进行河床、洲滩深度探测,形成一次河床深度的数据,并通过摄像探测组件便于进行摄像探测,用于观察水草和河床内部情形,并记录该处水草位置;
9.通过切割机构快速对水草进行切割,同时通过切割组件与带灯摄像头配合,实现对不同位置的水草进行切割;
10.通过压力探测机构有效通过压力变化,进行深度探测,从而获得洲滩深;
11.通过水流传感器和水量传感器配合,主控电脑与数据处理器配合,以及深度的探测信息,制定洲滩整治计划,还可建立大数据模型,后期可直接估算洲滩的深度、区域等数
据信息,制定洲滩整治计划。
技术实现要素:
12.本发明的目的是针对现有的技术存在上述问题,提出了一种潮汐分汊河段航道整治洲滩用水深测量装置,该发明要解决的技术问题是:如何实现有效准确的探测洲滩好及河水深度,以及探测水草和洲滩位置,进行大数据分析,进行数学建模,从而制定完善准确洲滩整治计划。
13.本发明的目的可通过下列技术方案来实现:
14.一种潮汐分汊河段航道整治洲滩用水深测量装置,包括探测船,所述探测船的上部后侧设有控制室,探测船的上部前侧设有转盘组件,转盘组件与探测船之间设有若干圆周均布的调节支腿,转盘组件上端设有圆周均布的切割机构、声波探测机构和压力探测机构,切割机构包括调节机械臂组、多级伸缩杆、切割组件和带灯摄像头,声波探测机构包括调节机械臂组、多级伸缩杆、摄像探测组件和声波探测器,压力探测机构包括多级机械臂组、位置传感器、多级伸缩杆和压力探测组件,压力探测组件的下端设有插杆。
15.本发明的工作原理:将探测船开到需要整治洲滩的潮汐分汊河段航道处,转盘组件转动,带动声波探测机构转动至探测船的正前方,声波探测机构的调节机械臂组带动多级伸缩杆、摄像探测组件和声波探测器展开,多级伸缩杆竖直向下,通过调节机械臂组与多级伸缩杆配合,将摄像探测组件和声波探测器插入河段航道水中,声波探测器探测河段航道的深度,从而获得该区域河段航道截面的河床深度,当河床出现水草时,会影响声波探测器的探测,此时摄像探测组件会观察到水草,并记录该处水草的位置,声波探测器探测后,形成一次河床深度的数据,其中有数据不符合河床的深度的整体,此处一般是为水草位置或泥沙蓄积的洲滩,需要整治;
16.转盘组件再转动120度,带动切割机构转动至探测船的正前方,切割机构的调节机械臂组带动多级伸缩杆、切割组件和带灯摄像头展开,该多级伸缩杆竖直向下,通过调节机械臂组与多级伸缩杆配合,将切割组件和带灯摄像头插入河段航道水中,带灯摄像头观察摄像探测组件记录的水草的位置,从而切割组件将河床上的水草切割,切割的水草随水流流走;
17.转盘组件再转动120度,带动压力探测机构转动至探测船的正前方,压力探测机构的多级机械臂组带动多级伸缩杆和压力探测组件展开,该多级伸缩杆竖直向下,通过多级机械臂组与多级伸缩杆配合,将压力探测组件插入河段航道水中,主要对于已切割水草位置或泥沙蓄积的洲滩位置进行检测,压力探测组件继续向下插入河床内部,洲滩处的压力和河床的压力不同,通过压力的变化,检测河床的深度以及洲滩的深度,形成二次河床深度的数据,从而获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,便于后期进行分汊河段航道的洲滩整治。
18.所述转盘组件包括转盘电机,转盘电机固定在探测船上,转盘电机的上端固定有旋转安装盘,调节支腿包括固定板,固定板固定在旋转安装盘的下端,固定板的下端固定有固定腿,固定腿的内部可调节的设有调节腿,调节腿的下端固定有万向轮。
19.采用以上结构,转盘电机带动旋转安装盘进行间歇转动,调节支腿可根据旋转安装盘与探测船的仓板高度,调整调节腿插入固定腿的内部的深度,万向轮在仓板上滚动,进
行有效支撑,保证切割机构、声波探测机构和压力探测机构稳定转动。
20.所述调节机械臂组包括旋转基座,旋转基座固定在旋转安装盘上,旋转基座上转动设有旋转安装座,旋转基座内部固定有旋转电机,旋转安装座固定连接在旋转电机的输出轴上,旋转安装座上铰接有第一机械臂,旋转安装座与第一机械臂之间铰接有第一推杆,第一机械臂的端部铰接有第二机械臂,第一机械臂和第二机械臂之间铰接有第二推杆,第二机械臂的端部铰接有第三机械臂,第二机械臂和第三机械臂之间铰接有第三推杆,第三机械臂的端部固定有安装板,多级伸缩杆固定在安装板的下端,切割组件和带灯摄像头设置在切割机构的多级伸缩杆下端。
21.采用以上结构,旋转电机的输出轴带动旋转安装座在旋转基座上转动,第一推杆伸缩带动第一机械臂展开收合,第二推杆伸缩带动第二机械臂展开收合,第三推杆伸缩带动第一机械臂收合展开,从而带动安装板移动位置,安装板带动多级伸缩杆移动位置,多级伸缩杆带动切割组件和带灯摄像头升降,调节切割组件和带灯摄像头位置,便于观察水草,通过切割组件快速切割水草。
22.所述切割组件包括安装架,安装架固定在切割机构的多级伸缩杆下端,安装架的上端固定有角度调节电机,角度调节电机的输出轴上固定有第一横杆,第一横杆的端部铰接有第一竖杆,第一竖杆的下端铰接有第二横杆,且第一竖杆的下端铰接在第二横杆的中部,安装架的侧边滑动设有两个连杆,第二横杆的两端分别与两个连杆的上端铰接,安装架的内侧固定有铰接座,铰接座的下端通过万向节连接有万向旋转座,万向旋转座与两个连杆的下端铰接,万向旋转座的下端设有切割电机,切割电机的输出轴上固定有机罩,机罩上固定有若干圆周均布的切刀。
23.采用以上结构,切割电机的输出轴上带动机罩转动,机罩带动切刀快速旋转,对水草进行切割,当水草位置倾斜时,或者水草长得位置倾斜时,角度调节电机的输出轴带动第一横杆转动位置,第一横杆向下推动第一竖杆,第一竖杆向下推动连杆向下移动,连杆带动万向旋转座围绕铰接座转动一定角度,从而调节机罩的角度,继而调节切刀的角度,切刀快速旋转,对水草进行切割。
24.所述摄像探测组件设置在声波探测机构的多级伸缩杆下端,摄像探测组件包括连接筒,连接筒固定在声波探测机构的多级伸缩杆下端,连接筒内部设有转动电机,连接筒的输出端通过转动接头连接有密封箱,转动电机的输出轴与密封箱固定连接,密封箱的内部固定有摄像电机,密封箱的下端转动设有摄像探头,密封箱的侧端设有链轮罩,摄像电机的输出轴与摄像探头的转轴之间设有传动链轮副,传动链轮副位于链轮罩内侧,摄像探头的两侧固定有探照灯,声波探测器的数量为若干个,若干个声波探测器设置在密封箱和链轮罩的外侧。
25.采用以上结构,声波探测器进行声波深度探测,当声波检测异常时,可能是水草或洲滩,此时,可通过转动电机的输出轴带动密封箱围绕转动接头转动,从而调节摄像探头和探照灯水平转动,摄像电机的输出轴通过传动链轮副带动摄像探头和探照灯竖向转动,探照灯进行照明,便于进行摄像探测,用于观察水草和河床内部情形。
26.所述多级机械臂组包括安装基座,安装基座固定在旋转安装盘上,安装基座上转动设有旋转架座,安装基座内部固定有转位电机,旋转架座固定连接在转位电机的输出轴上,旋转架座上铰接有多级伸缩臂,多级伸缩臂与旋转架座之间铰接有支撑推杆,多级伸缩
臂的端部设有端架,端架的端部铰接有调节端座,端架与调节端座之间铰接有端头推杆,调节端座的上端固定有调节端座电机,多级伸缩杆转动设置在调节端座的下端,调节端座电机的输出轴与多级伸缩杆传动连接,位置传感器固定在调节端座的前侧,该多级伸缩杆的下端设有限位板和升降调节电机,升降调节电机的输出轴上固定有主动齿轮,压力探测组件设置在多级伸缩杆和限位板之间。
27.采用以上结构,支撑推杆伸缩带动多级伸缩臂展开收合,多级伸缩臂可以调节端架的位置,端头推杆伸缩带动调节端座旋转一定角度,调节端座电机的输出轴可带动多级伸缩杆转动,从而带动压力探测组件转动一定位置,升降调节电机与压力探测组件带动插杆下降,插入河床或洲滩上,通过插入压力的变化,统计河床或洲滩的深度和位置。
28.所述压力探测组件包括安装轴承座,安装轴承座固定在压力探测机构的多级伸缩杆下端,安装轴承座的内部固定有内螺纹转动座,内螺纹转动座的下端固定有从动齿轮,从动齿轮与主动齿轮啮合,内螺纹转动座的内部螺接有升降螺杆,升降螺杆与限位板滑动配合,升降螺杆的下端固定有压力传感器,插杆固定在压力传感器的下端。
29.采用以上结构,升降调节电机的输出轴上带动主动齿轮转动,从动齿轮与主动齿轮啮合,从而带动从动齿轮转动,从动齿轮带动内螺纹转动座在安装轴承座的内部转动,升降螺杆与限位板滑动配合,从而使得升降螺杆在限位板内部上下滑动,即带动压力传感器上下滑动,压力传感器带动插杆向下移动插入河床或洲滩内部,检测的压力不同,压力变化时,从而获得洲滩深度。
30.所述探测船的下端设有水流传感器和水量传感器,控制室内部设有主控电脑,主控电脑与各电气元件电性连接,主控电脑与gps卫星通过无线网连接,gps卫星通过无线网连接岸边整治中心,主控电脑内部设有数据处理器,数据处理器进行大数据分析,形成潮汐分汊河段航道整治洲滩计划。
31.采用以上结构,水流传感器和水量传感器检测河水的流速和流量,主控电脑检测各电器元件的数据,并通过数据处理器进行大数据分析,分析河床的深度以及洲滩的深度,从而获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,便于后期进行分汊河段航道的洲滩整治,各数据信息可通过gps卫星传输至岸边整治中心,便于制定洲滩整治计划。
32.与现有技术相比,本潮汐分汊河段航道整治洲滩用水深测量装置具有以下优点:
33.通过转盘组件和调节支腿配合,实现稳定支撑切割机构、声波探测机构和压力探测机构进行有效转动,切换不同工作状态;
34.通过声波探测机构有效进行河床、洲滩深度探测,形成一次河床深度的数据,并通过摄像探测组件便于进行摄像探测,用于观察水草和河床内部情形,并记录该处水草位置;
35.通过切割机构快速对水草进行切割,同时通过切割组件与带灯摄像头配合,实现对不同位置的水草进行切割;
36.通过压力探测机构有效通过压力变化,进行深度探测,从而获得洲滩深;
37.通过水流传感器和水量传感器配合,主控电脑与数据处理器配合,以及深度的探测信息,制定洲滩整治计划,还可建立大数据模型,后期可直接估算洲滩的深度、区域等数据信息,制定洲滩整治计划。
附图说明
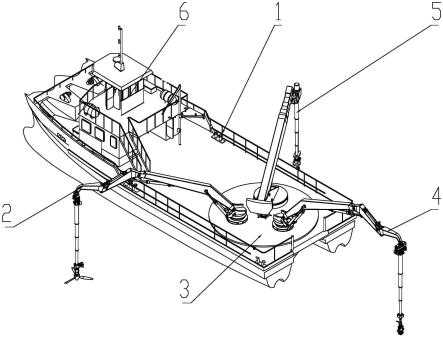
38.图1是本发明的立体结构示意图。
39.图2是本发明的正视结构示意图。
40.图3是本发明中切割机构的立体结构示意图。
41.图4是本发明中切割组件的结构示意图。
42.图5是本发明中声波探测机构的立体结构示意图。
43.图6是图5中a出的放大结构示意图。
44.图7是本发明中压力探测机构的立体结构示意图。
45.图8是本发明中压力探测组件的立体结构示意图。
46.图9是本发明中调节支腿的立体结构示意图。
47.图中,1、探测船;2、切割机构;3、转盘组件;4、声波探测机构;5、压力探测机构;6、控制室;7、转盘电机;8、调节支腿;9、旋转基座;10、旋转安装座;11、第一机械臂;12、第二机械臂;13、第三推杆;14、第三机械臂;15、安装板;16、多级伸缩杆;17、切割组件;18、第二推杆;19、第一推杆;20、安装架;21、第一竖杆;22、第二横杆;23、连杆;24、万向旋转座;25、机罩;26、切刀;27、铰接座;28、角度调节电机;29、第一横杆;30、调节机械臂组;31、摄像探测组件;32、声波探测器;33、连接筒;34、密封箱;35、探照灯;36、摄像探头;37、链轮罩;38、转动接头;39、安装基座;40、旋转架座;41、支撑推杆;42、多级伸缩臂;43、端架;44、端头推杆;45、调节端座电机;46、位置传感器;47、调节端座;48、限位板;49、压力探测组件;50、插杆;51、主动齿轮;52、安装轴承座;53、内螺纹转动座;54、从动齿轮;55、压力传感器;56、升降螺杆;57、固定板;58、调节腿;59、万向轮;60、固定腿;61、带灯摄像头。
具体实施方式
48.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
49.如图1-图9所示,本潮汐分汊河段航道整治洲滩用水深测量装置,包括探测船1,所述探测船1的上部后侧设有控制室6,探测船1的上部前侧设有转盘组件3,转盘组件3与探测船1之间设有若干圆周均布的调节支腿8,转盘组件3上端设有圆周均布的切割机构2、声波探测机构4和压力探测机构5,切割机构2包括调节机械臂组30、多级伸缩杆16、切割组件17和带灯摄像头61,声波探测机构4包括调节机械臂组30、多级伸缩杆16、摄像探测组件31和声波探测器32,压力探测机构5包括多级机械臂组、位置传感器46、多级伸缩杆16和压力探测组件49,压力探测组件49的下端设有插杆50;
50.将探测船1开到需要整治洲滩的潮汐分汊河段航道处,转盘组件3转动,带动声波探测机构4转动至探测船1的正前方,声波探测机构4的调节机械臂组30带动多级伸缩杆16、摄像探测组件31和声波探测器32展开,多级伸缩杆16竖直向下,通过调节机械臂组30与多级伸缩杆16配合,将摄像探测组件31和声波探测器32插入河段航道水中,声波探测器32探测河段航道的深度,从而获得该区域河段航道截面的河床深度,当河床出现水草时,会影响声波探测器32的探测,此时摄像探测组件31会观察到水草,并记录该处水草的位置,声波探测器32探测后,形成一次河床深度的数据,其中有数据不符合河床的深度的整体,此处一般是为水草位置或泥沙蓄积的洲滩,需要整治;
51.转盘组件3再转动120度,带动切割机构2转动至探测船1的正前方,切割机构2的调节机械臂组30带动多级伸缩杆16、切割组件17和带灯摄像头61展开,该多级伸缩杆16竖直向下,通过调节机械臂组30与多级伸缩杆16配合,将切割组件17和带灯摄像头61插入河段航道水中,带灯摄像头61观察摄像探测组件31记录的水草的位置,从而切割组件17将河床上的水草切割,切割的水草随水流流走;
52.转盘组件3再转动120度,带动压力探测机构5转动至探测船1的正前方,压力探测机构5的多级机械臂组带动多级伸缩杆16和压力探测组件49展开,该多级伸缩杆16竖直向下,通过多级机械臂组与多级伸缩杆16配合,将压力探测组件49插入河段航道水中,主要对于已切割水草位置或泥沙蓄积的洲滩位置进行检测,压力探测组件49继续向下插入河床内部,洲滩处的压力和河床的压力不同,通过压力的变化,检测河床的深度以及洲滩的深度,形成二次河床深度的数据,从而获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,便于后期进行分汊河段航道的洲滩整治。
53.转盘组件3包括转盘电机7,转盘电机7固定在探测船1上,转盘电机7的上端固定有旋转安装盘,调节支腿8包括固定板57,固定板57固定在旋转安装盘的下端,固定板57的下端固定有固定腿60,固定腿60的内部可调节的设有调节腿58,调节腿58的下端固定有万向轮59;
54.转盘电机7带动旋转安装盘进行间歇转动,调节支腿8可根据旋转安装盘与探测船1的仓板高度,调整调节腿58插入固定腿60的内部的深度,万向轮59在仓板上滚动,进行有效支撑,保证切割机构2、声波探测机构4和压力探测机构5稳定转动。
55.调节机械臂组30包括旋转基座9,旋转基座9固定在旋转安装盘上,旋转基座9上转动设有旋转安装座10,旋转基座9内部固定有旋转电机,旋转安装座10固定连接在旋转电机的输出轴上,旋转安装座10上铰接有第一机械臂11,旋转安装座10与第一机械臂11之间铰接有第一推杆19,第一机械臂11的端部铰接有第二机械臂12,第一机械臂11和第二机械臂12之间铰接有第二推杆18,第二机械臂12的端部铰接有第三机械臂14,第二机械臂12和第三机械臂14之间铰接有第三推杆13,第三机械臂14的端部固定有安装板15,多级伸缩杆16固定在安装板15的下端,切割组件17和带灯摄像头61设置在切割机构2的多级伸缩杆16下端;
56.旋转电机的输出轴带动旋转安装座10在旋转基座9上转动,第一推杆19伸缩带动第一机械臂11展开收合,第二推杆18伸缩带动第二机械臂12展开收合,第三推杆13伸缩带动第一机械臂11收合展开,从而带动安装板15移动位置,安装板15带动多级伸缩杆16移动位置,多级伸缩杆16带动切割组件17和带灯摄像头61升降,调节切割组件17和带灯摄像头61位置,便于观察水草,通过切割组件17快速切割水草。
57.切割组件17包括安装架20,安装架20固定在切割机构2的多级伸缩杆16下端,安装架20的上端固定有角度调节电机28,角度调节电机28的输出轴上固定有第一横杆29,第一横杆29的端部铰接有第一竖杆21,第一竖杆21的下端铰接有第二横杆22,且第一竖杆21的下端铰接在第二横杆22的中部,安装架20的侧边滑动设有两个连杆23,第二横杆22的两端分别与两个连杆23的上端铰接,安装架20的内侧固定有铰接座27,铰接座27的下端通过万向节连接有万向旋转座24,万向旋转座24与两个连杆23的下端铰接,万向旋转座24的下端
设有切割电机,切割电机的输出轴上固定有机罩25,机罩25上固定有若干圆周均布的切刀26;
58.切割电机的输出轴上带动机罩25转动,机罩25带动切刀26快速旋转,对水草进行切割,当水草位置倾斜时,或者水草长得位置倾斜时,角度调节电机28的输出轴带动第一横杆29转动位置,第一横杆29向下推动第一竖杆21,第一竖杆21向下推动连杆23向下移动,连杆23带动万向旋转座24围绕铰接座27转动一定角度,从而调节机罩25的角度,继而调节切刀26的角度,切刀26快速旋转,对水草进行切割。
59.摄像探测组件31设置在声波探测机构4的多级伸缩杆16下端,摄像探测组件31包括连接筒33,连接筒33固定在声波探测机构4的多级伸缩杆16下端,连接筒33内部设有转动电机,连接筒33的输出端通过转动接头38连接有密封箱34,转动电机的输出轴与密封箱34固定连接,密封箱34的内部固定有摄像电机,密封箱34的下端转动设有摄像探头36,密封箱34的侧端设有链轮罩37,摄像电机的输出轴与摄像探头36的转轴之间设有传动链轮副,传动链轮副位于链轮罩37内侧,摄像探头36的两侧固定有探照灯35,声波探测器32的数量为若干个,若干个声波探测器32设置在密封箱34和链轮罩37的外侧;
60.声波探测器32进行声波深度探测,当声波检测异常时,可能是水草或洲滩,此时,可通过转动电机的输出轴带动密封箱34围绕转动接头38转动,从而调节摄像探头36和探照灯35水平转动,摄像电机的输出轴通过传动链轮副带动摄像探头36和探照灯35竖向转动,探照灯35进行照明,便于进行摄像探测,用于观察水草和河床内部情形。
61.多级机械臂组包括安装基座39,安装基座39固定在旋转安装盘上,安装基座39上转动设有旋转架座40,安装基座39内部固定有转位电机,旋转架座40固定连接在转位电机的输出轴上,旋转架座40上铰接有多级伸缩臂42,多级伸缩臂42与旋转架座40之间铰接有支撑推杆41,多级伸缩臂42的端部设有端架43,端架43的端部铰接有调节端座47,端架43与调节端座47之间铰接有端头推杆44,调节端座47的上端固定有调节端座电机45,多级伸缩杆16转动设置在调节端座47的下端,调节端座电机45的输出轴与多级伸缩杆16传动连接,位置传感器46固定在调节端座47的前侧,该多级伸缩杆16的下端设有限位板48和升降调节电机,升降调节电机的输出轴上固定有主动齿轮51,压力探测组件49设置在多级伸缩杆16和限位板48之间;
62.支撑推杆41伸缩带动多级伸缩臂42展开收合,多级伸缩臂42可以调节端架43的位置,端头推杆44伸缩带动调节端座47旋转一定角度,调节端座电机45的输出轴可带动多级伸缩杆16转动,从而带动压力探测组件49转动一定位置,升降调节电机与压力探测组件49带动插杆50下降,插入河床或洲滩上,通过插入压力的变化,统计河床或洲滩的深度和位置。
63.压力探测组件49包括安装轴承座52,安装轴承座52固定在压力探测机构5的多级伸缩杆16下端,安装轴承座52的内部固定有内螺纹转动座53,内螺纹转动座53的下端固定有从动齿轮54,从动齿轮54与主动齿轮51啮合,内螺纹转动座53的内部螺接有升降螺杆56,升降螺杆56与限位板48滑动配合,升降螺杆56的下端固定有压力传感器55,插杆50固定在压力传感器55的下端;
64.升降调节电机的输出轴上带动主动齿轮51转动,从动齿轮54与主动齿轮51啮合,从而带动从动齿轮54转动,从动齿轮54带动内螺纹转动座53在安装轴承座52的内部转动,
升降螺杆56与限位板48滑动配合,从而使得升降螺杆56在限位板48内部上下滑动,即带动压力传感器55上下滑动,压力传感器55带动插杆50向下移动插入河床或洲滩内部,检测的压力不同,压力变化时,从而获得洲滩深度。
65.探测船1的下端设有水流传感器和水量传感器,控制室6内部设有主控电脑,主控电脑与各电气元件电性连接,主控电脑与gps卫星通过无线网连接,gps卫星通过无线网连接岸边整治中心,主控电脑内部设有数据处理器,数据处理器进行大数据分析,形成潮汐分汊河段航道整治洲滩计划;
66.水流传感器和水量传感器检测河水的流速和流量,主控电脑检测各电器元件的数据,并通过数据处理器进行大数据分析,分析河床的深度以及洲滩的深度,从而获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,便于后期进行分汊河段航道的洲滩整治,各数据信息可通过gps卫星传输至岸边整治中心,便于制定洲滩整治计划。
67.本发明的工作原理:
68.将探测船1开到需要整治洲滩的潮汐分汊河段航道处,转盘组件3转动,带动声波探测机构4转动至探测船1的正前方,声波探测机构4的调节机械臂组30带动多级伸缩杆16、摄像探测组件31和声波探测器32展开,多级伸缩杆16竖直向下,通过调节机械臂组30与多级伸缩杆16配合,将摄像探测组件31和声波探测器32插入河段航道水中,旋转电机的输出轴带动旋转安装座10在旋转基座9上转动,第一推杆19伸缩带动第一机械臂11展开收合,第二推杆18伸缩带动第二机械臂12展开收合,第三推杆13伸缩带动第一机械臂11收合展开,从而带动安装板15移动位置,安装板15带动多级伸缩杆16移动位置,多级伸缩杆16带动带灯摄像头61升降,调节带灯摄像头61位置,便于观察水草位置,声波探测器32探测河段航道的深度,从而获得该区域河段航道截面的河床深度,当河床出现水草时,会影响声波探测器32的探测,此时摄像探测组件31会观察到水草,并记录该处水草的位置,声波探测器32探测后,形成一次河床深度的数据,其中有数据不符合河床的深度的整体,此处一般是为水草位置或泥沙蓄积的洲滩,需要整治;
69.转盘组件3再转动120度,带动切割机构2转动至探测船1的正前方,切割机构2的调节机械臂组30带动多级伸缩杆16、切割组件17和带灯摄像头61展开,该多级伸缩杆16竖直向下,通过调节机械臂组30与多级伸缩杆16配合,将切割组件17和带灯摄像头61插入河段航道水中,带灯摄像头61观察摄像探测组件31记录的水草的位置,切割电机的输出轴上带动机罩25转动,机罩25带动切刀26快速旋转,对水草进行切割,当水草位置倾斜时,或者水草长得位置倾斜时,角度调节电机28的输出轴带动第一横杆29转动位置,第一横杆29向下推动第一竖杆21,第一竖杆21向下推动连杆23向下移动,连杆23带动万向旋转座24围绕铰接座27转动一定角度,从而调节机罩25的角度,继而调节切刀26的角度,切刀26快速旋转,对水草进行切割,切割的水草随水流流走;
70.转盘组件3再转动120度,带动压力探测机构5转动至探测船1的正前方,压力探测机构5的多级机械臂组带动多级伸缩杆16和压力探测组件49展开,该多级伸缩杆16竖直向下,通过多级机械臂组与多级伸缩杆16配合,支撑推杆41伸缩带动多级伸缩臂42展开收合,多级伸缩臂42可以调节端架43的位置,端头推杆44伸缩带动调节端座47旋转一定角度,调节端座电机45的输出轴可带动多级伸缩杆16转动,从而带动压力探测组件49转动一定位
置,升降调节电机与压力探测组件49带动插杆50下降,插入河床或洲滩上,通过插入压力的变化,统计河床或洲滩的深度和位置,升降调节电机的输出轴上带动主动齿轮51转动,从动齿轮54与主动齿轮51啮合,从而带动从动齿轮54转动,从动齿轮54带动内螺纹转动座53在安装轴承座52的内部转动,升降螺杆56与限位板48滑动配合,从而使得升降螺杆56在限位板48内部上下滑动,即带动压力传感器55上下滑动,压力传感器55带动插杆50向下移动插入河床或洲滩内部,检测的压力不同,压力变化时,从而获得洲滩深度,即获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,形成二次河床深度的数据;
71.水流传感器和水量传感器检测河水的流速和流量,主控电脑检测各电器元件的数据,并通过数据处理器进行大数据分析,分析河床的深度以及洲滩的深度,从而获得了河床的深度变化、需要治理的洲滩的位置、深度和不规则区域面积,形成有效的数据信息如截面图、等高线等数据,便于后期进行分汊河段航道的洲滩整治,各数据信息可通过gps卫星传输至岸边整治中心,便于制定洲滩整治计划。
72.数据足够多时,可形成的大数据分析模型,如水量、水流、等高线以及河流形状等这些数据,后期别的河流可直接通过输入这些数据,不需要再细致的探测水深,基本就可估算洲滩的深度、区域等数据信息,制定洲滩整治计划。
73.综上,通过转盘组件3和调节支腿8配合,实现稳定支撑切割机构2、声波探测机构4和压力探测机构5进行有效转动,切换不同工作状态;
74.通过声波探测机构4有效进行河床、洲滩深度探测,形成一次河床深度的数据,并通过摄像探测组件31便于进行摄像探测,用于观察水草和河床内部情形,并记录该处水草位置;
75.通过切割机构2快速对水草进行切割,同时通过切割组件17与带灯摄像头61配合,实现对不同位置的水草进行切割;
76.通过压力探测机构5有效通过压力变化,进行深度探测,从而获得洲滩深;
77.通过水流传感器和水量传感器配合,主控电脑与数据处理器配合,以及深度的探测信息,制定洲滩整治计划,还可建立大数据模型,后期可直接估算洲滩的深度、区域等数据信息,制定洲滩整治计划。
78.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1