非侵入式无接触填充物位确定系统和方法与流程
1.本发明涉及填充物位确定系统和方法,用于确定容器中的物品的填充 物位,该容器具有将容器的内部与容器的外部分开的容器壁。
背景技术:
2.容器中的物品的填充物位的确定通常使用填充物位确定系统来完成, 该填充物位确定系统包括布置在容器的内部的至少一个部件,诸如探头或 天线。这通常需要容器馈通(a tank feed-through)通过容器壁中形成的孔 来用于填充物位确定。至少在一些应用中,诸如针对具有极端温度和/或 侵蚀性物品的容器中的填充物位确定,这可能增加成本和复杂性和/或在 技术上是困难的。
3.已经提出将应变仪附接至容器的外部,并且基于来自应变仪的信号来 估计填充物位。例如,已经建议通过感测支撑结构的变形来推断容器的质 量(包括容器中的物品)。根据de 10109058中描述的另一种方法,使用 布置在燃料箱底部的一个或更多个应变仪来确定汽车燃料箱中的填充物 位。
4.尽管应变仪的使用减轻了对容器馈通的需要,但是似乎仍然存在与例 如填充物位确定的可靠性和精度相关的问题。
技术实现要素:
5.鉴于以上情况,本发明的总体目的是提供不需要容器馈通的、用于填 充物位确定的改进的系统和方法。
6.因此,根据本发明的第一方面,提供了一种填充物位确定系统,用于 确定容器中的物品的填充物位,该容器具有将容器的内部与容器的外部分 开的容器壁,填充物位确定系统包括:第一测量单元,用于布置在容器的 外部的第一测量位置处,第一测量单元包括用于生成、发射和接收电磁信 号的收发器;以及耦接至收发器的天线装置,用于将由收发器生成的电磁 第一发射信号从第一测量位置朝向容器壁上的第一目标位置辐射,并且用 于将由第一发射信号在第一目标位置处的反射产生的电磁第一反射信号 朝向收发器返回;用于存储容器变形数据和参照数据(reference data)的 存储器,容器变形数据指示容器中的物品的物位与容器在第一目标位置处 的变形之间的已知关系,参照数据指示针对容器中的物品的已知物位的、 第一测量位置与第一目标位置之间的参照距离;以及耦接至第一测量单元 的收发器以及耦接至存储器的处理电路,处理电路被配置成:从存储器获 取容器变形数据和参照数据;以及基于容器变形数据、参照数据以及第一 发射信号与第一反射信号之间的定时关系(timing relation)来确定填充物 位。
[0007]“收发器”可以是能够发射和接收微波信号的一个功能单元,或者可 以是包括单独的发射器单元和接收器单元的系统。也应当注意,处理电路 可以被提供为一个设备或一起工作的若干个设备。
[0008]
本发明基于以下认识:在固定的测量位置与容器壁的外部的目标位置 之间的距
离或距离变化的无接触测量可以提供非侵入式填充物位测量的 优点,而没有与应变仪或类似设备的使用相关的缺点,即应变仪或类似设 备需要与容器壁良好且稳定的机械连接,并且在容器壁处经受潜在的恶劣 条件的缺点。这种恶劣的条件可能包括极端温度、冷凝或结冰以及振动。
[0009]
测量基于对朝向容器壁的外部辐射的至少一个电磁发射信号与由发 射信号在容器壁的外部处的反射产生的至少一个对应的电磁反射信号之 间的定时关系的分析。
[0010]
根据实施方式,第一测量单元的收发器可以被配置成基于第一发射信 号和第一反射信号形成测量信号,该测量信号至少指示第一发射信号与第 一反射信号之间的相位差;并且处理电路可以被配置成基于容器变形数 据、参照数据和测量信号来确定填充物位。
[0011]
与分析反射信号和发射信号之间的频率差提供的精度(针对典型的频 率范围和测量扫描配置,大约为1mm)相比,分析反射信号与发射信号 之间的相位差可以提供明显更高的精度(针对典型的频率范围和测量扫描 配置,大约为10μm或更高精度)。
[0012]
针对这种测量技术,可以使用cw(连续波)或fmcw(调频连续波) 雷达系统。这种雷达系统本身是本领域普通技术人员公知的。
[0013]
在使用fmcw技术的传统无接触填充物位确定系统中,通常不使用 相位信息,因为针对典型的距离范围,相位信息和距离之间的关系不是明 确的。
[0014]
本发明人现在惊奇地发现,针对根据本发明实施方式的非侵入式无接 触测量系统,更精确的相位差测量可以产生明确的测量结果,因为所需的 测量范围要小得多。例如,根据容器的特性和测量单元的布置,约1mm 的容器壁变形的变化可以与约1m的填充物位的变化对应。
[0015]
根据各种实施方式,填充物位确定系统可以被配置成获取指示容器的 取向的测量;并且处理电路可以被配置成另外还基于所获取的指示容器的 取向的测量来确定填充物位。这可以提供改进的例如更可靠的填充物位确 定,因为可以检测和补偿可能的容器倾斜。
[0016]
在实施方式中,填充物位确定系统还可以包括第二测量单元,第二测 量单元用于布置在容器的外部的不同于第一测量位置的第二测量位置处, 第二测量单元包括用于生成、发射和接收电磁信号的收发器;以及耦接至 收发器的天线装置,用于将由收发器生成的电磁第二发射信号从第二测量 位置朝向容器壁上的第二目标位置辐射,并且用于将由发射信号在第二目 标位置处的反射产生的电磁第二反射信号朝向收发器返回。容器变形数据 可以另外还指示容器中的物品的物位与容器在第二目标位置处的变形之 间的已知关系;参照数据可以另外还指示针对容器中的物品的已知物位 的、第二测量位置与第二目标位置之间的参照距离;并且处理电路可以被 配置成另外还基于第二发射信号和第二反射信号之间的定时关系来确定 填充物位。
[0017]
根据本发明的第二方面,提供了一种确定容器中的物品的填充物位的 方法,该容器具有将容器的内部与容器的外部分开的容器壁,方法包括以 下步骤:将电磁第一发射信号从第一测量位置朝向向容器壁上的第一目标 位置辐射;接收由第一发射信号在第一目标位置处的反射产生的电磁第一 反射信号;获取容器变形数据和参照数据,容器变形数据指示容器中物品 的物位与容器在第一目标位置处的变形之间的已知关系,参照数据指示
针 对容器中物品的已知物位的、第一测量位置与第一目标位置之间的参照距 离;以及基于容器变形数据、参照数据以及第一发射信号与第一反射信号 之间的定时关系来确定填充物位。
[0018]
总之,本发明因此涉及一种填充物位确定系统,用于确定容器中的物 品的填充物位,填充物位确定系统包括:测量单元,用于布置在测量位置 处,该测量单元包括收发器;以及耦接至收发器的天线装置,用于将由收 发器生成的电磁发射信号从测量位置朝向容器壁上的目标位置辐射,并且 用于将由发射信号在目标位置处的反射产生的电磁第一反射信号朝向收 发器返回;以及耦接至测量单元的收发器的处理电路,处理电路被配置成 基于容器变形数据和第一发射信号与第一反射信号之间的定时关系来确 定填充物位,容器变形数据指示容器中的物品的物位与容器在第一目标位 置处的变形之间的已知关系。
附图说明
[0019]
现在将参照示出本发明的当前优选实施方式的附图更详细地描述本 发明的这些方面和其他方面,在附图中:
[0020]
图1a至图1c示意性地示出了根据本发明的填充物位确定系统的第 一示例实施方式,该填充物位确定系统位于用于对容器中的物品的填充物 位进行非侵入式无接触确定的一个示例布置中;
[0021]
图2是在图1a至图1c的示例布置中的在容器中的物品的填充物位 与测量单元同容器壁的外部之间的距离之间的代表性关系;
[0022]
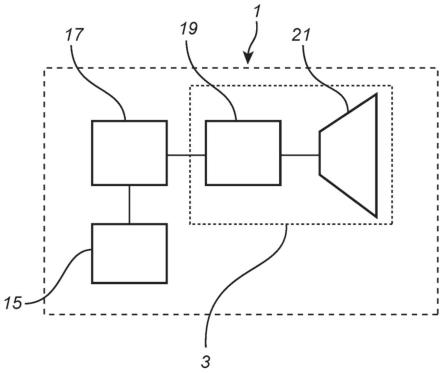
图3是图1a至图1c中的填充物位确定系统的示意性框图;
[0023]
图4是包括在图3的填充物位确定系统中的测量单元的示意性框图;
[0024]
图5a至图5c是示意性地示出在根据本发明的填充物位确定系统的 示例实施方式中使用反射信号与发射信号之间的相位差来进行填充物位 确定的图;
[0025]
图6是使用反射信号与发射信号之间的相位差进行的填充物位确定 的图;
[0026]
图7示意性地示出了根据本发明的填充物位确定系统的第二示例实 施方式;
[0027]
图8示意性地示出了根据本发明的填充物位确定系统的第三示例实 施方式;以及
[0028]
图9a至图9c示意性地示出了根据本发明的填充物位确定系统的第 四示例实施方式。
具体实施方式
[0029]
图1a至图1c示意性地示出了根据本发明的填充物位确定系统1的 第一示例实施方式,该填充物位确定系统位于用于对容器5中的物品4的 填充物位进行非侵入式无接触确定的一个示例布置中。
[0030]
图1a至图1c中的填充物位确定系统1包括测量单元3,该测量单元 被布置在容器5的外部的测量位置7处。在图1a中,容器5是空的(l1=0), 并且测量位置7与容器壁11上的目标位置9之间的距离为d(l1)。在图 1b中,容器5中的物品4达到指示物位l2,并且测量位置7与容器壁11 上的目标位置9之间的距离为d(l2)。在图1c中,容器5中的物品4达 到指示物位l3,并且测量位置7与容器壁11上的目标位置9之间的距离 为d(l3)。如图1a至图1c中示意性示出的,填充物位的增加导致容器 壁11的膨胀增加(为了说明的目的,容器壁11的膨胀
在图1a至图1c 中被放大)。因此,可以基于测量位置7与目标位置9之间的测量距离(或 距离变化)以及填充物位l与容器壁11在目标位置9处的变形之间的已 知关系来确定未知填充物位。
[0031]
图2是示意性示出由曲线13表示的这种已知关系的示例的图。如图 2中示意性示出的,可以使用曲线13将所测量的距离d与填充物位l相 关。
[0032]
本领域普通技术人员可以通过几种可行的方式确定容器中物品的物 位与容器的变形之间的关系。例如,已知尺寸的空容器可以被填充一系列 已知体积的相关物品,并且可以针对这些已知体积测量变形。直接将已知 体积转换成已知物位。可替选地或以组合的方式,可以在容器-物品组合 的映射期间将常规的“侵入式”填充物位测量与变形测量相关。根据另一 个替选方案,填充物位与变形之间的关系可以使用物品的已知特性和容器 的数学模型用标准技术建模。
[0033]
现在将参照图3中的示意性框图更详细地描述图1a至图1c中的填 充物位确定系统1。参照图3,填充物位确定系统1包括测量单元3、存 储器15和处理电路17。测量单元3包括收发器19和天线装置21。收发 器19被配置成生成、发射和接收电磁信号,并且天线装置21被耦接至收 发器19,用于当测量单元3被布置在测量位置7时将电磁发射信号朝向 目标位置9辐射,并且将由发射信号在目标位置处的反射产生的反射信号 返回至收发器19(参照图1a至图1c)。天线装置21可以是适合实现的 任何天线装置,并且例如可以包括喇叭天线、透镜天线、棒状天线、抛物 面天线和贴片天线中的一种或更多种。下面将参照图4更详细地描述收发 器的示例实施方式。
[0034]
存储器15被配置成存储容器变形数据和参照数据,容器变形数据指 示容器5中的物品4的物位l与容器5在第一目标位置9处的变形之间的 已知关系,参照数据指示针对容器5中的物品4的已知物位的、测量位置 7与目标位置9之间的参照距离。变形数据可以由上面参照图2提到的曲 线13表示,或者以任何其他合适的表示诸如查找表或函数进行表示。参 照数据可以指示针对任何已知物位(例如空容器或满容器等)的、测量位 置7与目标位置9之间的距离。
[0035]
处理电路17被耦接至测量单元3的收发器19以及耦接至存储器15, 并且被配置成从存储器15获取上述容器变形数据和参照数据,并且基于 容器变形数据、参照数据以及发射信号与反射信号之间的定时关系来确定 填充物位l。
[0036]
总体而言,发射信号与反射信号之间的定时关系可以由处理电路17 分析,以估计发射信号的发射与反射信号的接收之间的时间。基于该时间 和天线装置21与容器壁11之间的介质中的光速,可以确定距离。使用脉 冲信号和频率调制连续信号来实现这一点的各种方式对于雷达物位计量 领域的普通技术人员来说是公知的。下面将参照图5a至图5c进一步详 细描述可能特别适合于实现足够精度的示例技术。
[0037]
图4是图3中的填充物位确定系统1的示例配置的部分简化示意框 图。
[0038]
收发器19在此处被示为包括微波源23、功率分配器25和混合器27。 处理电路17被示出为包括定时电路29、采样器31、fft块33、相位确定 块35、内部存储器37和填充物位确定块39。
[0039]
如图4中示意性示出的,定时电路29被耦接至微波源23以控制微波 源23生成发射信号s
t
。微波源23经由功率分配器25连接至天线21,并 且因此将发射信号s
t
提供至天线21。
来自天线21的反射信号sr被功率 分配器25路由至混合器27,混合器27还被连接成接收来自微波源23的 信号。由微波源23提供的发射信号s
t
和来自天线21的反射信号sr被组 合以形成测量信号,该测量信号在此被称为中频信号(intermediatefrequency signal)s
if
。术语“中频信号”通常用于描述在fmcw型系统 中混合发射信号和反射信号所产生的信号。该信号将指示发射信号与反射 信号之间的频率差(如果有的话)以及相位差。对于普通技术人员明显的 是,由于发射信号的频率是恒定的,因此在cw型系统中混合发射信号和 反射信号所产生的测量信号针对该应用将不会指示频率差。
[0040]
如图4中示意性示出的,中频信号s
if
由采样器31进行采样,采样器 31可以由定时电路29控制以与发射信号s
t
同步。所采样的中频信号s
if
由fft块33和相位确定块35进一步处理,以确定中频信号if的相位。 该相位可选地与辅助数据——诸如温度数据——一起存储在内部存储器 37中,如图4中虚线箭头示意性所示。基于存储在内部存储器37中的相 位数据和可选的辅助数据,以及存储在存储器15中的上述容器变形数据 和参照数据,物位确定块39确定容器5中的填充物位l,并提供指示填 充物位l的信号。
[0041]
虽然收发器19的元件通常以硬件实现并且形成集成单元——常被称 为微波单元——的一部分,但是处理电路17的至少一些部分通常可以通 过由嵌入式处理器执行的软件模块实现。本发明不限于该特定实现,并且 可以考虑被发现适用于实现本文中描述的功能的任何实现方式。
[0042]
现在将参照图5a至图5c中的图示来描述基于所获取的中频信号的 相位来确定容器壁11的变形的示例性方式。使用fmcw型雷达物位计系 统领域中本身公知的技术,首先将发射信号s
t
和反射信号sr组合以形成 所谓的中频信号s
if
。图5a在时域中示出了示例性中频信号s
if
。
[0043]
此后,确定中频信号s
if
的相位φ。根据本发明的实施方式,这可以 通过例如借助于图4中的fft块33将中频信号s
if
变换至频域,识别与 容器壁11处的反射对应的频率(中频信号携带最大能量的频率),并且确 定针对该频率的中频信号s
if
的相位φ来完成。该过程由图5b示意性地 示出,图5b示出了根据频率的、由中频信号s
if
承载的能量,而图5c示 出了根据频率的相位。应当注意,图5b和图5c针对与发射信号在容器 壁11处的反射对应的中频信号的频率周围的相当窄的频率间隔进行了放 大。相位φ存储在内部存储器37中。针对小的距离变化,相位的变化可 以用于以高精度明确地确定距离变化。
[0044]
例如,可以从内部存储器37中检索与先前测量操作相关联的中频信 号的相位,并且可以确定相位变化。基于该相位变化,可以高精度地确定 目标位置处的容器壁11的变形的变化。
[0045]
针对频率未被调制的cw雷达系统可以使用基本相同的过程。在这种 情况下,显然不需要识别与容器壁处的反射对应的频率,因为只有一个频 率。同样针对上述fmcw情况,根据系统配置,诸如频率扫描的频率范 围,可以省略该步骤。
[0046]
图6是使用反射信号sr与发射信号s
t
之间的相位差进行的填充物位 确定的图。
[0047]
使用含有水的钢容器获得以下给出的测试结果。容器具有传统的雷达 物位计系统,该传统的雷达物位计系统被布置成基于容器中的物品的表面 上的电磁信号的反射来测量填充物位。
[0048]
直至第一时间t1,水位保持静止,使用传统雷达物位计系统测量的填 充物位为
1016mm。在第一时间t1,开始供水并保持在恒定流速,直至第 二时间t2。在第二时间,使用常规雷达物位计系统测量填充物位为2030 mm。同时,使用非侵入式无接触填充物位确定系统1(参见图1a至图 1c)测量从测量位置7至目标位置9的距离的变化δd。
[0049]
如图6所示,当容器中的物位从1016mm变化至2030mm时,可以 测量到约0.8mm的线性距离变化。精度被估计约为10μm。
[0050]
在第三时间t3,开始排水并保持在基本恒定的流速,直至第四时间t4。 在第四时间,使用常规雷达物位计系统测量填充物位为968mm。
[0051]
到目前为止,已经讨论了包括单个测量单元3的填充物位确定系统1, 该单个测量单元3被布置成将发射信号朝向容器壁11上的单个目标位置9 辐射。
[0052]
尽管这种填充物位确定系统1已经示出提供了与容器5中的实际填充 物位良好相关的测量值,但是本发明人已经认识到,可能存在需要进一步 提高性能的装置。例如,在容器5不仅可以表现出容器壁11的膨胀,而 且表现出可以取决于或不取决于容器5中物品4的填充物位的取向(倾斜) 的变化的装置中,可能需要另外的信息。因此,根据本发明的填充物位确 定系统1的另外的实施方式可以被配置成获取指示容器5的取向的测量, 并且处理电路17可以被配置成另外还基于所获取的指示容器5的取向的 测量来确定填充物位l。测量取向的各种方式本身是本领域普通技术人员 已知的。例如,可以使用激光器和光电检测器的组合来测量容器5上的点 相对于容器5外部的固定结构的移动。
[0053]
可替选地或以组合的方式,填充物位确定系统1的其他配置可以对容 器取向的变化不太敏感和/或提供使得能够检测和补偿容器取向的变化的 另外的信息。
[0054]
在图7中示意性示出的第二示例实施方式中,测量单元35以容器5 的取向α的变化导致测量单元3的取向的对应变化的方式附接至容器。参 照图7,使用附接装置40将测量单元3附接至容器壁11,并且微波反射 结构41a至41c被附接至容器壁11。微波反射结构41a至41c例如可以是 焊接至容器壁11的金属结构,其在容器壁11上限定对应的目标位置9a 至9c。在操作中,测量单元3发射发射信号并接收由在第一微波反射结构 41a、第二微波反射结构41b和第三微波反射结构41c处的反射产生的反 射信号。由于容器5的变形,图7中示意性示出的各个距离da(l)、d
b (l)和dc(l)将与填充物位l相关,但将与容器5的取向α无关。基 于这些距离和/或这些距离随时间的变化、容器变形数据和参照数据,可 以确定填充物位l。
[0055]
在图8中示意性示出的第三示例实施方式中,测量单元3的天线装置 可以被配置成在不同方向上辐射发射信号,使得可以确定和评估测量位置 7与容器壁11上的多个目标位置9a至9c之间的距离和/或距离随时间的 变化。由于容器5的变形,图8中示意性示出的各个距离da(l)、db(l) 和dc(l)将与填充物位l相关,并且还将与容器5的取向α相关。通过 分析这些距离da(l)、db(l)、dc(l)在容器中的物位l变化期间随时 间的发展,将可以识别并至少部分地消除容器取向的影响。基于这些距离 和/或这些距离随时间的变化、容器变形数据和参照数据,可以确定填充 物位l。
[0056]
图9a至图9c示意性地示出了根据本发明的填充物位确定系统的第 四示例实施方式。首先参照图9a,该填充物位确定系统1包括多个测量 单元3a至3d,这些测量单元被布置在不同的测量位置7a至7d处以监测 测量位置7a至7d与相应的目标位置9a至9d之间的距离da至dd。在图 9a中,从上方观看容器5,并且在测量单元3a至3d的该示例配置中,距 离da至dd
的分析使得填充物位确定系统1能够区分容器5的变形(膨胀) 和容器5的取向变化(倾斜)。
[0057]
在图9b中,示出了测量位置7a至7d与目标位置9a至9d之间的距 离da至dd的示例性和示意性变化,其与由填充物位l的变化引起的容器 变形的变化一致。可以得出该结论,因为所有距离da至dd随时间的发展 是相似的。特别地,所有的距离da至dd以基本相似的变化率增加。这指 示没有倾斜,并且填充物位l减小。
[0058]
在图9c中,示出了测量位置7a至7d与目标位置9a至9d之间的距 离da至dd的示例性和示意性变化,其与容器5在图9a中表现出从左至右 的倾斜运动相一致。可以得出该结论,因为彼此相对的第一组测量单元 3a、3c指示相反的趋势(增加距离da和减小距离dc),而第二组测量单元 3b、3d指示基本上恒定的距离db、dd。
[0059]
存储器15和处理电路17(参照图3)可以分布在测量单元3a至3d 之中,或者存储器15和处理电路可以为测量单元3a至3d所共用,并且 布置在测量单元3a至3d之一中,或者与测量单元3a至3d分开布置。
[0060]
作为图9a中的测量单元配置的替选或变化,测量单元3a至3d可以 被布置在不同的竖直水平上。
[0061]
可以添加另外的测量单元以获得更鲁棒的测量。
[0062]
本领域技术人员认识到,本发明决不限于上述优选实施方式。相反, 在所附权利要求的范围内,许多修改和变化是可能的。例如,发射信号可 以是脉冲信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1