一种大地电磁强噪声时段压制方法及系统
1.本发明涉及大地电磁信号处理技术领域,特别是涉及一种大地电磁强噪声时段压制方法及系统。
背景技术:
2.大地电磁测深(magnetotelluric,mt)方法是一种重要的地球物理勘探方法,该方法通过在地表观测天然电磁信号能够有效获取地下深部的电阻率信息,在矿产、油气藏勘探以及构造研究等领域具有广泛应用。然而天然电磁场强度较弱,在人文噪声的干扰下,大地电磁响应曲线往往表现出明显的畸变,严重影响到对地下结构的反演与解释。因此,选取有效的方法压制大地电磁测量结果中的噪声干扰对于保障大地电磁测深法的应用效果具有重要意义。
3.随着现代化进程的推进,大地电磁信号所受噪声干扰强度越来越大,且噪声类型变得更加复杂。当处理含复杂噪声的低信噪比数据时,传统频率域方法由于所处理的频谱为全时段信号在频率域的加权平均结果,而非直接针对噪声进行处理,盲目性较强,易损失有效信号并残留大量噪声,当大地电磁信号中噪声强度很大时,频率域方法所得结果仍然具有明显畸变。而传统时间域方法通过对特定波形的识别,既能压制噪声时段内的异常波形,又能避免对非噪声时段的处理引起的有效信号损失,因而具有较强的针对性。但是这类方法对噪声波形的假设过于理想,在实测信号中仅通过对某一种或某几种异常波形的滤除难以实现对大地电磁信号中复杂噪声的压制。同时还有少数噪声不具有特殊波形,只在频谱中出现异常。
技术实现要素:
4.基于此,本发明的目的是提供一种大地电磁强噪声时段压制方法及系统,用以克服传统去噪方法的缺陷,通过对强噪声时段的压制实现对大地电磁畸变曲线的校正。
5.为实现上述目的,本发明提供了如下方案:
6.一种大地电磁强噪声时段压制方法,包括:
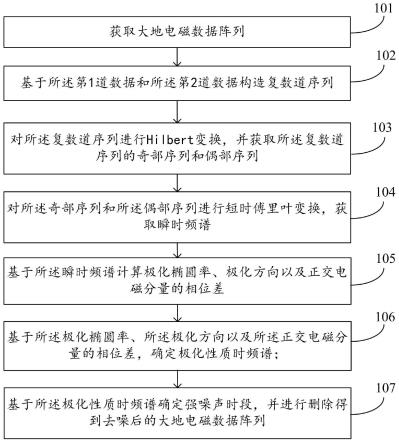
7.获取大地电磁数据阵列;所述大地电磁数据阵列包括5道数据,第1道数据为南北向的电道测量值,第2道数据为东西向的电道测量值,第3道数据为南北向的磁道测量值,第4道数据为东西向的磁道测量值,第5道数据为垂向磁道测量值;
8.基于所述第1道数据和所述第2道数据构造复数道序列;
9.对所述复数道序列进行hilbert变换,并获取所述复数道序列的奇部序列和偶部序列;
10.对所述奇部序列和所述偶部序列进行短时傅里叶变换,获取瞬时频谱;
11.基于所述瞬时频谱计算极化椭圆率、极化方向以及正交电磁分量的相位差;
12.基于所述极化椭圆率、所述极化方向以及所述正交电磁分量的相位差,确定极化性质时频谱;所述极化性质时频谱包括极化椭圆率时频谱、极化方向时频谱以及正交电磁
场分量相位差时频谱;
13.基于所述极化性质时频谱确定强噪声时段并进行删除,得到去噪后的大地电磁数据阵列。
14.可选地,所述复数道序列的构造公式如下:
15.c(t)=e
x
(t)+iey(t)
16.其中,c(t)为t时间点的复数道序列,i为虚数单位,e
x
为第1道数据,ey为第2道数据。
17.可选地,所述瞬时频谱的计算公式如下:
[0018][0019][0020]
其中,为偶部序列c
+
对应的瞬时频谱,为偶部序列c
-
对应的瞬时频谱,t=1,2,3,...,n,为不同时间点,m为瞬时频谱的时间因子,n为瞬时频谱的频率因子,g*为窗函数g的共轭,i为虚数单位。
[0021]
可选地,所述极化椭圆率ε的计算公式如下:
[0022][0023]
可选地,所述极化方向θ的计算公式如下:
[0024][0025]
可选地,所述正交电磁分量的相位差δφ的计算公式如下:
[0026][0027]
本发明还提供了一种大地电磁强噪声时段压制系统,包括:
[0028]
大地电磁数据阵列获取模块,用于获取大地电磁数据阵列;所述大地电磁数据阵列包括5道数据,第1道数据为南北向的电道测量值,第2道数据为东西向的电道测量值,第3道数据为南北向的磁道测量值,第4道数据为东西向的磁道测量值,第5道数据为垂向磁道测量值;
[0029]
复数道序列构造模块,用于基于所述第1道数据和所述第2道数据构造复数道序列;
[0030]
奇部序列和偶部序列获取模块,用于对所述复数道序列进行hilbert变换,并获取所述复数道序列的奇部序列和偶部序列;
[0031]
瞬时频谱获取模块,用于对所述奇部序列和所述偶部序列进行短时傅里叶变换,获取瞬时频谱;
[0032]
计算模块,用于基于所述瞬时频谱计算极化椭圆率、极化方向以及正交电磁分量的相位差;
[0033]
极化性质时频谱确定模块,用于基于所述极化椭圆率、所述极化方向以及所述正交电磁分量的相位差,确定极化性质时频谱;所述极化性质时频谱包括极化椭圆率时频谱、极化方向时频谱以及正交电磁场分量相位差时频谱;
[0034]
去噪模块,用于基于所述极化性质时频谱确定强噪声时段并进行删除,得到去噪后的大地电磁数据阵列。
[0035]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0036]
本发明通过短时傅里叶变换求得大地电磁时间序列的瞬时频谱,并基于所得瞬时频谱求得大地电磁信号在不同时段与不同频段的极化性质,最后根据信号在不同时段的极化性质识别并筛除强噪声时段。由于瞬时频谱为时频域的概念,具有频率分辨率的同时也具有时间分辨率,因而能够反映大地电磁信号在不同时段的含噪情况,从而实现对噪声针对性滤除。此外,本发明所述方法基于信、噪的不同极化性质而不是特殊的噪声形态,因此当噪声形态复杂时仍能对其进行有效识别并压制。本发明能够克服传统去噪方法的缺陷,通过对强噪声时段的压制从而实现对大地电磁畸变曲线的校正。
附图说明
[0037]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0038]
图1为本发明提供的大地电磁强噪声时段压制方法的流程图。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
本发明的目的是提供一种大地电磁强噪声时段压制方法及系统,用以克服传统去噪方法的缺陷,通过对强噪声时段的压制实现对大地电磁畸变曲线的校正。
[0041]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0042]
如图1所示,本发明提供的大地电磁强噪声时段压制方法,包括以下步骤:
[0043]
步骤101:获取大地电磁数据阵列。
[0044]
将大地电磁数据导入计算机中,获取数据矩阵x;x为n
×
5矩阵,n为仪器记录的数据长度,每一列为一道数据,大地电磁测深一共采集5道数据,其中第1、2道为南北向、东西向的电道测量值,第3、4道为南北向和东西向的磁道测量值,第5道为垂向磁道测量值。
[0045]
步骤102:基于所述第1道数据和所述第2道数据构造复数道序列。
[0046]
取数据矩阵x中的第1道与第2道数据,分别记为e
x
与ey(电道相比于磁道更对噪声更加敏感,因此选取正交的电道进行噪声时段识别),并基于e
x
与ey构造复数道序列c:
[0047]
c(t)=e
x
(t)+iey(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0048]
此处t=1,2,3,...,n,代表不同时间点,i为虚数单位。
[0049]
步骤103:对所述复数道序列进行hilbert变换,并获取所述复数道序列的奇部序列和偶部序列。
[0050][0051][0052][0053]
其中为c的hilbert变换结果,c
+
与c
-
分别为c的偶部序列与奇部序列。
[0054]
步骤104:对所述奇部序列和所述偶部序列进行短时傅里叶变换,获取瞬时频谱。
[0055][0056][0057]
其中与分别为c
+
与c
-
对应的瞬时频谱,m为瞬时频谱的时间因子,n为瞬时频谱的频率因子,g*为窗函数g的共轭,本发明中选择汉宁窗作为窗函数其定义如下:
[0058]
g(t)=0.5*[1-cos[2*π*(t-1)/(n-1)]]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0059]
步骤105:基于所述瞬时频谱计算极化椭圆率ε、极化方向θ以及正交电磁分量的相位差δφ。
[0060][0061][0062][0063]
其中为的共轭频谱,arg为反正切函数(反正切处理可在matlab里实现)。
[0064]
步骤106:基于所述极化椭圆率、所述极化方向以及所述正交电磁分量的相位差,确定极化性质时频谱;所述极化性质时频谱包括极化椭圆率时频谱、极化方向时频谱以及正交电磁场分量相位差时频谱。
[0065]
取步骤105获得极化椭圆率ε,极化方向θ,以及正交电磁分量的相位差δφ,以时间因子m为横轴,频率因子n为纵轴,使用颜色的深浅代表极化性质的取值大小,从而分别获得极化椭圆率时频谱、极化方向时频谱以及正交电磁场分量相位差时频谱。
[0066]
步骤107:基于所述极化性质时频谱确定强噪声时段并进行删除,得到去噪后的大地电磁数据阵列。
[0067]
基于步骤106所得的极化性质时频谱,筛选出强噪声时段(强噪声时段在时频谱上表现为垂直于时间轴的带状异常),并在大地电磁数据时间序列中截掉强噪声时段所对应的片段,所得结果即为去噪后的大地电磁数据:
[0068][0069]
其中t1~t2为根据时频谱划分的噪声时段,xd为去噪后的数据矩阵,j为数据矩阵的列。
[0070]
本发明提出的大地电磁噪声压制方法具有很强的噪声识别能力,能够针对性地去除大地电磁时间序列中的噪声干扰,同时适用性很强,适用于绝大多数的人文噪声压制且不受噪声复杂波形的制约。
[0071]
本发明的优点来源于:
①
所提噪声识别方法在时频域进行,同时具有时间域分辨能力与频率域分辨能力,既能根据极化性质随时间的变化划分含噪时段,又能根据极化性质随频率的变化确定噪声对大地电磁响应的实际影响范围,因此具有很强的噪声识别能力,并能据此实现对噪声有针对性地压制;
②
本发明是基于信号的极化性质进行的噪声压制,由于线性极化是几乎所有人文噪声都具有的特点,因此不受噪声形态与类型的约束,具有广泛的适用性。
[0072]
本发明还提供了一种大地电磁强噪声时段压制系统,包括:
[0073]
大地电磁数据阵列获取模块,用于获取大地电磁数据阵列;所述大地电磁数据阵列包括5道数据,第1道数据为南北向的电道测量值,第2道数据为东西向的电道测量值,第3道数据为南北向的磁道测量值,第4道数据为东西向的磁道测量值,第5道数据为垂向磁道测量值;
[0074]
复数道序列构造模块,用于基于所述第1道数据和所述第2道数据构造复数道序列;
[0075]
奇部序列和偶部序列获取模块,用于对所述复数道序列进行hilbert变换,并获取所述复数道序列的奇部序列和偶部序列;
[0076]
瞬时频谱获取模块,用于对所述奇部序列和所述偶部序列进行短时傅里叶变换,获取瞬时频谱;
[0077]
计算模块,用于基于所述瞬时频谱计算极化椭圆率、极化方向以及正交电磁分量的相位差;
[0078]
极化性质时频谱确定模块,用于基于所述极化椭圆率、所述极化方向以及所述正交电磁分量的相位差,确定极化性质时频谱;所述极化性质时频谱包括极化椭圆率时频谱、极化方向时频谱以及正交电磁场分量相位差时频谱;
[0079]
去噪模块,用于基于所述极化性质时频谱确定强噪声时段并进行删除,得到去噪后的大地电磁数据阵列。
[0080]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说
明即可。
[0081]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1