无人机检测和监测桥梁墩柱竖直度及外观质量缺陷的方法与流程
1.本发明涉及工程技术领域,尤其是一种桥梁墩柱检测技术。
背景技术:
2.桥梁是跨越江、河、沟、谷或人为安设的障碍物的构造物。桥梁墩柱不仅支承上部结构,而且还将桥梁自身恒载和车辆活载等各种荷载传递至地基,故一个合格的墩柱是桥梁运营的前提和基础。现阶段桥梁墩柱竖直度的检测和监测,是通过吊锤球法和全站仪平距法测量墩柱上下部的相对平距,具体是:吊锤球法通常使用桥梁检测车或搭设管架至墩顶作为平台,测量时,测量人员到达墩顶位置的平台,确定墩柱纵向或横向位置,测量人员下吊锤球,待锤球稳定后墩柱上、下部位的测量人员量取垂线到墩柱表面的距离d
上
和d
下
,同时测量上、下两个测点间的距离h,即墩柱高度,则竖直度偏差为s=|d
上-d
下
|/h*100%,通过与设计值比较即可确认是否在安全状态。采用桥梁检测车作平台时需要在桥面上配置交通保障措施,墩柱下部测量人员需要跨越障碍物,测量过程中受风等干扰大,测量效率低下,且存在高空掉物或跨越障碍时的巨大的安全隐患;搭设管架平台的吊锤球测量方法,需要逐墩搭设管架,安全性更差,费用更高,效率更低。
3.全站仪平距法测量原理与吊垂球法相同,全站仪通过激光对墩柱上、下表面照准,测量出上、下相对平距d
上
、d
下
及相对高程h
上
、h
下
,则竖直度偏差s=|d
上-d
下
|/|h
上-h
下
|*100%。全站仪平距法比吊锤球法快速,但需要在每一个墩柱的纵向及横向找到合适的仪器架设场地,全站仪测量精度高,过程中测量人员要跨越各类障碍物,人身安全性低,经济性及效率都不高。
4.对于墩柱的外观质量缺陷检测,均需测量人员到达现场进行肉眼检查,或是用望远镜观测,同样安全性得不到保障,检测过程局限性大,盲区大。
技术实现要素:
5.本发明的目的是提出一种利用无人机进行远程桥梁墩柱竖直度的测量及外观质量缺陷检测的方法,人员无需到达现场,安全可靠,可以提高效率。
6.无人机检测和监测桥梁墩柱竖直度及外观质量缺陷的方法,是应用无人机进行检测、监测,无人机搭载ccd图像处理机和相位激光测头,其特征在于该方法包括以下步骤:步骤1,由无人机搭载的相位激光测头中的三维激光扫描仪对待测墩柱绕行第一圈,实施三维扫描,并创建墩柱的三维立体模型,以及识别并计算出墩柱地面高度h和直径d;步骤2,无人机绕墩柱飞行第二圈,通过相位激光测头中的三维激光扫描仪扫描确定墩柱的前后左右4条竖向测线,同时相位激光测头中的相位测距仪对测线按间距实时测量;所述测线为墩柱高度方面在桥梁的纵向或横向的外表面各测点连接线,即各测点的拟合线,在墩柱表面以墩柱几何中心前后左右对称分布,反映墩柱各节段间的相对位移;
相位测距仪测量出每条测线上各个测点的平距d和相对高程h,并计算每条测线的竖直度偏差s:s=|d
上
‑ꢀd下
|/|h
上
‑ꢀh下
|*100%;其中d
上
为测线上墩柱顶部的平距,d
下
为测线上墩柱底部的平距,h
上
为测线上墩柱上部的相对高程,h
下
为测线上墩柱下部的相对高程;所述的竖直度偏差s为测线顶部和底部的平距差与墩柱高的百分比,反映墩柱顶部几何中心与底部几何中心的相对位移量;步骤3,根据测量结果,墩柱纵向的前后两条测线、横向的左右两条测线相互校核,判断墩柱各节段间相对位移的一致性,并通过竖直度偏差与设计值相比较判断墩柱的安全性。
7.所述的纵向的前后两条测线是指在相对于桥墩或墩柱的几何中心位于桥梁起点方向的测线为纵向前测线,位于桥梁终点方向的测线为纵向后测线。
8.所述的横向的左右两条测线是指在相对于桥墩或墩柱的几何中心位于左侧的测线为横向左测线,位于右侧的测线为横向右测线。
9.所述的平距d指测线上的测点与相位测距仪测量中心间的水平距离;所述的高程h指测线上的测点与相位测距仪测量中心间的相对铅锤高差。
10.计算竖直度偏差s时,因竖直度是表征墩柱顶部几何中心线与墩柱底部几何中心在铅锤方向的相对位移参数,因此竖直度偏差是在墩柱顶、底部水平截面的几何中心投影在水平面上的距离与两个几何中心点间的铅锤距离即墩柱高度的百分比,已即测线上顶部和底部的两个测点投影在水平面上的距离与两测点铅锤距离的百分比。任意两测点间的竖直度偏差仅能反映该两点间的竖直度情况,仅有墩柱顶部和底部两个测点间的竖直度偏差才能代表整个墩柱的竖直度情况;测线只是按一定间距的测点组成间断拟合线,反映墩柱表面在测线上顺直程度,即反映施工时的工艺水平或墩柱受到外力干预时形状变化。
11.本发明利用无人机进行桥梁墩柱竖直度及外观质量缺陷检测的方法提高了墩柱检测及监测的效率,测量人员的人身安全得到很大保障,墩柱全方位检测无盲区,精准度高。
12.一座桥梁在投入运营前建立完整的三维模型,在桥梁运营期进行的每次监测的数据纳入系统,形成一套完整的比对数据链,对桥梁进行动态监测,对于滑坡等不良地质地段的桥梁监测或墩柱受撞击等灾害发生时的应急检查,对于数据链的应用尤为重要。
附图说明
13.图1为实施例1的 1-1号墩柱测线右立面示意图。
14.图2为实施例1 的1-2号墩柱测线右立面示意图。
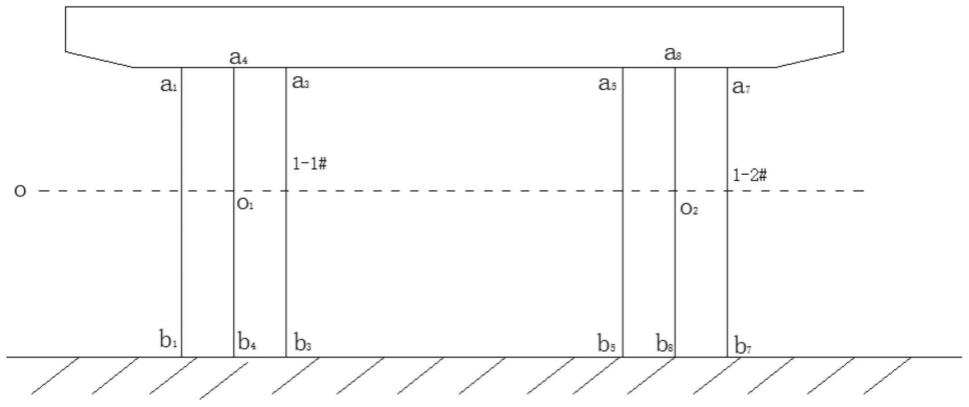
15.图3为实施例1的1号桥墩1-1号、1-2号墩柱后立面示意图。
16.图4为实施例1的1号桥墩和2号桥墩右立面示意图。
17.图5为实施例2的1号矩形桥墩前立面示意图。
具体实施方式
18.实施例1:无人机检测和监测桥梁墩柱竖直度及外观质量缺陷的方法,所监测的桥墩为1号和2号,每个桥墩有2个圆形墩柱。1号桥墩为路线前进方向的第一排墩柱,分别包括
1-1号、1-2号墩柱;2号桥墩为第二排墩柱,分别包括2-1号、2-2号墩柱。
19.每个墩柱在桥梁的纵向及横向各有2条对称测线即共4条测线,两个桥墩则有16条测线,分别为1-1号墩柱的a1b1、a2b2、a3b3、a4b4, 1-2号墩柱的a5b5、a6b6、a7b7、a8b8,2-1号墩柱的a9b9、a
10b10
、a
11b11
、a
12b12
,2-2号墩柱的a
13b13
、a
14b14
、a
15b15
、a
16b16
。
20.所述测线为沿墩柱高度方向在桥梁纵向和横向的墩柱外表面各测点的拟合线,以墩柱几何中心对称分布,如图1所示,a1b1和a3b3、a2b2和a4b4是1-1墩柱几何中心纵向、横向对称的测线;如图2所示,a5b5和a7b7、a6b6和a8b8是1-2墩柱几何中心纵向、横向对称的测线,以此类推,2号桥墩也有四对几何中心对称测线。
21.所述的桥墩为两孔和两孔以上的桥梁中,除两端与路堤衔接的桥台外的其余中间支撑结构。墩身为实体墩、柱式墩或排架墩,按平面形状分为矩形墩、尖端形墩或圆形墩,常见的为圆形排架式墩,即一个桥墩多由不少于2颗圆柱形墩柱横排式组成。
22.测量过程具体包括以下步骤:步骤1,无人机围绕1号桥墩外围飞行一圈,由其搭载的三维激光扫描仪对墩柱及其300米范围内的结构物实施三维扫描。根据1号桥墩结构物特征实现三维立体模型的创建,识别计算出1-1号墩柱和1-2号墩柱的高度h和直径d;同时搭载的ccd图像处理机分别对1-1号墩柱和1-2号墩柱进行全景拍摄。
23.步骤2,如图4,无人机绕1号桥墩外围飞行第二圈时,飞行至o点位置,三维激光扫描仪通过自身的全覆盖三维测量模式,筛选识别出与1-1号墩柱右侧面相切点o1、与2-1号墩柱右侧面相切点o2的激光射线oo1o2,即切线oo1o2。此时切线oo1o2为桥梁纵轴向的平行线,自切点o1沿水平左移πd/4至e1点,e1点即为1-1号墩柱e1水平截面处的前纵向测点。由三维扫描仪瞬时全方位扫描得1-1号墩柱前纵向面按一定间距测量的多个“e
1”测点,多个“e
1”测点拟合出1-1号墩柱前纵向面测线a2b2。相位测距仪按设置间距精准测量出a2b2测线上各个测点平距d 和相对高程h。取柱顶a2和柱底b2两测点的平距和两点间高程按平距法即算出1-1号墩柱纵向前测线的竖直度偏差s=|d
a2-d
b2
|/|h
a2-h
b2
|*100%;步骤3,如图3,无人机绕1号桥墩外围飞行第二圈时,飞行至o点位置,三维激光扫描仪通过自身的全覆盖三维测量模式,筛选识别出与1-1号墩柱后侧面相切点o1、与1-2号墩柱后侧面相切点o2的激光射线oo1o2,即切线oo1o2。此时切线oo1o2为1号桥墩桥梁横轴向的平行线,自切点o1沿水平左移πd/4至e1点,e1点即为1-1号墩柱e1水平截面处的横向右测点。由三维扫描仪瞬时全方位扫描得1-1号墩柱横向右面按一定间距测量的多个“e
1”测点,多个“e
1”测点拟合出1-1号墩柱横向右面测线a1b1。相位测距仪按设置间距精准测量出a1b1测线上各个测点平距d 和相对高程h。
24.以此类推,飞行完第二圈即可测得余下的测线及相对应的竖直度偏差。
25.所述的0点为相对的动态点,是扫描仪的测量中心与切点同线;切线oo1o2为桥墩纵轴线或横轴线平行线。
26.所述的桥梁纵轴向指相应位置的车行方向,直线桥不变,弧线桥随路线变动;横轴向为与其垂直的方向。
27.步骤4,1-1号墩柱的测线a1b1和 a3b3、a2b2和 a4b4,1-2号墩柱测线a5b5和a7b7、a6b6和 a8b8相互校核以判断墩柱线性的一致性;并通过竖直度偏差s与设计的竖直度相比较判断墩柱的安全性。
28.依次类推,对2号桥墩的2-1号墩柱、2-2号墩柱进行测量判断。
29.实施例2:无人机检测和监测桥梁墩柱竖直度及外观质量缺陷的方法,所监测的桥墩为1号,1号桥墩为1个独立的矩形墩柱,故有前后左右4条测线。
30.测量过程具体包括以下步骤:步骤1,无人机围绕1号桥墩飞行一圈,由其搭载的三维激光扫描仪对墩柱及其300米范围内的结构物实施三维扫描。根据1号桥墩结构物特征实现三维立体模型的创建,识别并计算出1号墩柱的高度h和前后左右四个面的上下宽度d;同时搭载的ccd图像处理机对1号墩柱进行全景拍摄。
31.步骤2,如图5,无人机绕1号桥墩飞行第二圈时,根据1号墩柱已建立的三维模型,飞行至纵向前面中部位置,三维激光扫描仪通过自身的全覆盖三维测量模式,识别并测定1号墩柱纵向前面竖向中线d/2即测线a2b2,相位测距仪按一定间距测量出测线上各测点平距d 和相对高程h。取墩顶a2和墩底b2两测点的平距和两点间相对高程h
a2
和h
b2
,按平距法即算出1号墩柱纵向前测线的竖直度偏差s=|d
a2-d
b2
|/|h
a2-h
b2
|*100%;以此类推即可测出另外三面的测线a1b1、 a4b4、a3b3。
32.步骤3,1号墩柱的测线a1b1和 a3b3、a2b2和 a4b4相互校核以判断墩柱各节段间线性的一致性;并通过竖直度偏差s与设计的竖直度相比较判断墩柱的安全性。
33.墩柱外观质量的缺陷,则根据ccd图像处理机中的高清广角相机对墩柱全景拍摄并识别墩柱表面的缺陷,再由高清望远镜相机补拍甄别,在测量人员确认缺陷后启用相位激光测头发出高精度三维扫描测量,即可测得缺陷的面积或体积。
34.所述的三维模型的创建是相位激光测头采用atrplus自动识别照准技术,通过自动识别、照准与中心定位自动获取目标点到面的三维坐标、反射率、纹理特征等电磁反射特性和背景特性,并进行特征提取拼接获取三维模型。建模分为上下两个部分,下部模型是在墩柱竖直度检测过程中已扫描创建或为下部模型的建立而扫描,上部模型是无人机搭载检测系统沿桥面纵向上方一定高度飞行,对桥面即桥位附近一定宽度单位的结构物进行三维扫描建立三维模型。在上部扫描过程中系统自动识别并把上下部模型拼接完整,得到一套独立完整三维模型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1