一种用于地形匹配导航的多功能高度表的制作方法
1.本发明涉及城市轨道交通技术领域,具体涉及一种用于地形匹配导航的多功能高度表。
背景技术:
2.无线电高度表用于测量飞行器平台与地/海面之间的相对高度,具有全天时、全天候的优点,在导航领域应用广泛。近年来随着地形辅助导航技术发展,对无线电高度表性能提出了更高的要求。
3.为了适应平台高机动特性,高度表天线一般设计为宽波束以覆盖平台姿态范围,传统测高方式为实孔径的工作方式,宽波束条件下对应的地面脚印(或者是照射面积)比较大,并且随高度变大其波束覆盖范围迅速变大,造成其地面分辨率和测量精度指标下降,在地形起伏较大的条件下难以实现地形匹配任务。
4.为了提高对地面的分辨率,人们利用天线波束内的多普勒效应实现地面条带细分,其技术核心为合成孔径雷达测高技术,通过多普勒波束锐化技术(即dbs技术)可以有效提高地面单元的分辨率,使高度表具备高分辨、高精度测高能力。但该技术对载机平台的速度、姿态有一定的要求,如果高度表天线波束为宽波束,在机动平台大姿态高速运动时,其探测波束内产生的多普勒频率大,回波变化大,采用dbs技术进行高分辨测量时为了不使多普勒模糊,在高速运动条件下对探测脉冲频率要求较高,给高分辨测量带来较大困难。因此,高分辨测量一般应用在平台小姿态运动条件下,相对较窄的天线波束宽度可以将多普勒频率约束在一定的范围内,便于硬件设计及系统实现,且效费比较好。由于这两种测高产品的硬件不能兼容,目前高分辨测高和大机动测高产品独立应用在相应的机动平台上。
技术实现要素:
5.本发明的目的是提供一种用于地形匹配导航的多功能高度表,复合了高分辨测高和大机动测高两种功能,两种测高模式通过软件切换,能够满足飞行器对地形匹配导航及常规测高要求。
6.一种用于地形匹配导航的多功能高度表,包括:
7.微波收发组合,用于产生探测信号,接收并处理所述回波信号;
8.信号处理组合,用于与控制系统实时通讯,根据测高模式产生控制时序,控制所述微波收发组合产生所述探测信号,对所述回波信号进行采样、频谱分析和角度解算等处理,将测量结果和其他遥测数据发送至所述控制系统;
9.天线,用于发射所述探测信号,并接收所述回波信号;
10.其中,所述测高模式包括高分辨测高模式和高机动测高模式。
11.可选地,还包括:二次电源,用于将一次电源转换为多路二次电源,以供所述信号处理组合和微波收发组合使用。
12.可选地,所述天线包括:发射天线和接收天线;所述发射天线用于发射所述探测信
号,所述接收天线用于接收所述回波信号。
13.可选地,所述发射天线为宽波束天线,波束宽度适应大机动姿态范围;所述接收天线集成宽波束天线和窄波束天线,波束宽度适应大机动姿态范围和高分辨测高姿态范围;通过选择开关实现所述宽波束天线或所述窄波束天线的选用。
14.可选地,所述发射天线和所述接收天线上分别设有透波罩,所述透波罩通过频选设计实现所述发射天线和所述接收天线具备隐身功能。
15.可选地,所述接收天线、所述选择开关和低噪声放大器集成设计;其中,所述宽波束天线和所述窄波束天线在同一基板上设计,馈电口采用波导形式,通道选择开关、隔离器、限幅器和低噪声放大器等微波器件布局在高频头内,并通过波导馈电口实现信号传输。
16.可选地,高分辨模式下脉冲重复频率prf通过下式进行计算:
[0017][0018]
其中,vs为水平速度,θ为天线主波束宽度,λ为探测信号波长;
[0019]
每个脉冲的发射信号为线性调频宽带信号,脉冲宽度不大于脉冲重复周期,每簇产生n个脉冲的探测信号,脉冲数量n与条带分辨率相关;
[0020]
根据控制指令选择窄波束接收天线进入高分辨测高模式,按照式(1)计算脉冲重复周期,产生脉冲数量为n的一簇探测信号,对回波采样后,依次完成距离向fft处理,方位向fft处理,结合飞行器天向速度实现器下点条带提取;条带提取按下式计算:
[0021][0022]
其中,vh为天向速度,n为脉冲数,λ为探测信号波长,prf为脉冲重复频率;
[0023]
所述高分辨测高模式具体包括:进入高分辨测高模式后选用窄波束接收天线,根据平台水平飞行速度实时计算脉冲重复频率,产生探测信号,每个探测周期内包含一定数量的脉冲串,每个脉冲的发射信号为线性调频信号,对回波信号先进行距离向fft处理,再进行方位向fft处理,按公式(3)选取飞行器下点条带,提取该条带高度,实现高度解算。
[0024]
可选地,所述大机动测高模式包括:选用宽波束接收天线,产生宽脉冲调频探测信号,其中平台天向速度形成的多普勒信息会耦合在距离回波内,通过速度信息实现耦合多普勒解算及距离补偿。
[0025]
可选地,所述多功能高度表在宽空域条件下,平台在不同空域条件下对测高精度的需求不同;在低空域条件下,高度表参数设计上采用大带宽探测方式以确保距离分辨率足够高,实现高精度探测;在高空域条件下,高度表参数设计上采用大脉宽探测方式,以确保分辨单元内的回波能力足够高,确保高度表能对地面回波稳定跟踪不失锁。
[0026]
可选地,高度捕获及跟踪处理包括:高度表射频开机后进入全空域搜索,捕获到地/海面有效回波后根据所处高度段调整高度参数,使高度表工作在最佳探测状态,跟踪过程中当地/海面回波丢失后,在所处高度段就近搜索,当重新捕获到有效高度后转入跟踪状态,若一直不能捕获到地面回波,则进入全空域搜索,直至捕获到有效地/海面回波;捕获到地/海面有效回波后,高度表探测参数根据相对高度自适应调整,控制其探测功率、接收机
增益、调频带宽、调频脉宽等参数以实现最优探测。
[0027]
相对于现有技术,本发明具有以下有益效果:
[0028]
1、本发明提供一种用于地形匹配导航的多功能高度表,在同一硬件平台上兼顾了高分辨测高和大机动测高,两种测高方式通过软件切换,实现高分辨测高和大机动测高,满足了载机平台对地形匹配导航以及大机动正常测高的需求。
[0029]
2、本发明复合了高分辨测高和大机动测高两种功能,两种测高模式通过软件切换,能够满足飞行器对地形匹配导航及常规测高要求。
附图说明
[0030]
图1为本发明实施例中多功能高度表组成示意图;
[0031]
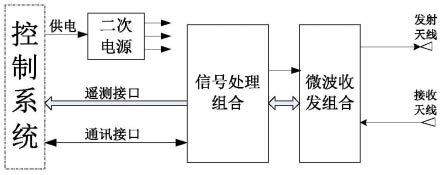
图2为本发明实施例中高度表各部分连接示意图;
[0032]
图3为本发明实施例中接收天线与高频头布局示意图;
[0033]
图4为本发明实施例中信号处理组合框图;
[0034]
图5为本发明实施例中高度表工作流程图;
[0035]
图6为本发明实施例中高分辨测高处理流程图;
[0036]
图7为本发明实施例中大机动测高处理流程图;
[0037]
图8为本发明实施例中高度捕获及跟踪处理流程图。
具体实施方式
[0038]
以下结合附图通过具体实施例对本发明作进一步的描述,这些实施例仅用于说明本发明,并不是对本发明保护范围的限制。
[0039]
本发明提供了一种用于地形匹配导航的多功能高度表,多功能高度表硬件设计为了兼容高分辨测高和大机动测高两种功能,需要在天线波束、信号处理流程等方面进行差异化设计以满足要求;为了满足产品硬件共用,通过软件切换实现测高模式转换,采用兼容性设计措施,其中接收天线将宽波束天线和窄波束天线集成在同一基板;信号处理组和硬件实现兼容性设计,针对高分辨测高和大机动测高信号特征分别采用不同的信号处理流程,使两种测高功能及性能满足要求。
[0040]
1)天线兼容性设计
[0041]
宽波束天线和窄波束天线分别适应大机动测高和高分辨测高,在保证测量性能的条件下为了减小系统开销,发射天线选用宽波束天线,波束宽度适应大机动姿态范围,接收天线集成宽波束天线和窄波束天线,波束宽度适应大机动姿态范围和高分辨测高姿态范围,通过选择开关实现天线选用,透波罩通过频选设计以确保天线具备隐身特性,如下图所示。
[0042]
为了提高接收机性能、减小信号传输衰减,将接收天线、选择开关和低噪声放大器集成设计,其中宽波束天线和窄波束天线在同一基板上设计,馈电口采用波导形式,通道选择开关、隔离器、限幅器和低噪声放大器等微波器件布局在一高频头内,并通过波导馈电口实现信号传输。
[0043]
2)信号处理组合硬件兼容性设计
[0044]
信号处理组合原理框图如下图所示,需要完成与控制系统信息交互,控制微波收
发组合根据探测时序产生探测信号,对回波信号的采样、频谱分析、高度解算等处理,将最终的测量结果以及其他遥测数据经通讯接口传给控制系统。
[0045]
信号处理组合中滤波放大电路通带范围、adc最高采样率、信号处理器处理速度、数据容量兼顾大机动测高和高分辨测高要处理信号的最大包络,并能实时控制微波收发组合根据相应的时序产生调频信号。
[0046]
3)信号处理流程差异化设计
[0047]
高度表工作流程见图所示,高度表上电后开始加载程序,经过基本配置和初始化后,保证通信模块工作就绪,并自动完成自检进入待机模式,收到射频开机指令后根据控制指令进入相应的测高模式。
[0048]
高机动测高模式下,选用宽波束接收天线以覆盖平台姿态范围,采用连续波调频体制实现高度捕获和跟踪,并根据探测高度调整调频带宽和探测时序,确保工作在最佳状态。在高分辨测高工作模式下,高度表实时接收平台速度、姿态信息,并根据水平速度、窄天线波束宽度实时计算脉冲重复频率,确定测高时序,结合速度信息实现器下点条带选取和高度解算。
[0049]
a、高分辨测高处理流程
[0050]
高分辨模式下prf脉冲重复频率根据下式计算可确保多普勒不模糊。
[0051][0052]
其中,vs为水平速度,θ为天线主波束宽度,λ为探测信号波长。每个脉冲的发射信号为线性调频宽带信号,脉冲宽度不大于脉冲重复周期,每簇产生n个脉冲的探测信号,脉冲数量n与条带分辨率相关,为了方便计算基2傅立叶变换,n一般取2的幂次方。高分辨测高处理流程图见图5所示,根据控制指令选择窄波束接收天线进入高分辨测高模式,按照式(1)计算脉冲重复周期,产生脉冲数量为n的一簇探测信号,对回波采样后,依次完成距离向fft处理,方位向fft处理,结合飞行器天向速度实现器下点条带提取。条带提取按下式计算:
[0053][0054]
其中,vh为天向速度,n为脉冲数,λ为探测信号波长,prf为脉冲重复频率。
[0055]
高分辨测高处理流程为,进入高分辨测高模式后选用窄波束接收天线,根据平台水平飞行速度实时计算脉冲重复频率,产生探测信号,每个探测周期内包含一定数量的脉冲串,每个脉冲的发射信号为线性调频信号,对回波信号先进行距离向fft(快速傅立叶变换)处理,再进行方位向fft处理,按公式(3)选取飞行器下点条带,提取该条带高度,实现高度解算。
[0056]
b、大机动测高处理流程
[0057]
进入大机动测高模式后选用宽波束接收天线,产生宽脉冲调频探测信号,其中平台天向速度形成的多普勒信息会耦合在距离回波内,通过速度信息实现耦合多普勒解算及距离补偿。
[0058]
c、捕获跟踪策略及自适应参数调整
[0059]
多功能高度表在宽空域条件下,平台在不同空域条件下对测高精度的需求不同,如低空域条件下要求测量精度较高,高度表参数设计上采用大带宽探测方式以确保距离分辨率足够高,实现高精度探测;高空域条件下要求测高可靠性较高,高度表参数设计上采用大脉宽探测方式,以确保分辨单元内的回波能力足够高,确保高度表能对地面回波稳定跟踪不失锁。高度捕获及跟踪处理流程见下图所示,高度表射频开机后进入全空域(高度表测高范围)搜索,捕获到地/海面有效回波后根据所处高度段调整高度参数,使高度表工作在最佳探测状态,跟踪过程中当地/海面回波丢失后,首先在所处高度段就近搜索,当重新捕获到有效高度后转入跟踪状态,如果一直不能捕获到地面回波则进入全空域搜索,直至捕获到有效地/海面回波。
[0060]
捕获到地/海面有效回波后,高度表探测参数根据相对高度自适应调整,控制其探测功率、接收机增益、调频带宽、调频脉宽等参数以实现最优探测。
[0061]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1