一种激光测距主动跟踪装置
1.本发明属于光学领域,具体涉及一种激光测距主动跟踪装置。
背景技术:
2.卫星激光测距技术是目前空间合作目标观测手段中直接测量精度最高的一种,测量精度已达到亚厘米量级,在卫星精密定轨及空间大地测量中已经得到广泛。由于卫星激光测距能够同时提供目标的方位和距离信息,将卫星激光测距技术用于非合作目标观测上,使空间碎片的观测精度有数量级的提高,从而提高空间碎片的轨道预报精度和定轨精度。该测量技术虽不能用于寻找空间碎片目标,但对于已知不同高度的目标,只要能成功测距,可以达到米级测距精度。激光测距技术在空间碎片观测中的应用将大幅提高空间碎片的跟踪监视技术,增强对空间碎片环境的分析预测能力。
3.在应用激光测距技术对空间目标(合作目标、空间碎片)进行观测时,常采用ccd成像探测的方式对可见目标进行跟踪闭环,当空间碎片处于地影时,因目标不可见,所以利用ccd跟踪的方法失效,只能通过人工干预办法对目标进行盲搜索,盲搜索带来的问题是成功探测概率极低,限制了测距系统的观测时段。
技术实现要素:
4.本发明解决的技术问题是克服现有技术的不足,提供一种激光测距主动跟踪装置。
5.(1)在功能上具备目标距离测量和激光主动跟踪功能。
6.(2)针对不见目标进行测距时采用传统搜索方法所带来的效率低的问题。
7.(3)能够充分发挥单光子探测器高灵敏度的优势。
8.本发明的采用如下技术方案:一种激光测距主动跟踪装置,包括设与超导单光子探测器和望远镜之间的接收光路;激光经过的发射光路包括第一45度反射镜3、第二45度反射镜4、第三45度反射镜5、第四45度反射镜6、第五45度反射镜7、光束变换正透镜8、光束变换扩束负透镜9、转镜10以及激光器11;
9.反射后的光线经过所述接收光路18包括第一45度反射镜3、第二45度反射镜4、第三45度反射镜5、第四45度反射镜6、第五45度反射镜7、光束变换正透镜8、光束变换扩束负透镜9、转镜10、光纤耦合透镜12、阵列光纤13、fc/pc光纤接头14和超导单光子探测器15;
10.设置在超导单光子探测器15和光纤耦合透镜12的阵列接收系统,所述阵列接收系统包括耦合透镜12和y型阵列光纤13;
11.所述y型阵列光纤13的输入端为中心一根,周围均匀排列的6根多模光纤构成;每根光纤分成两路输出,且输出光纤长度不同;每根光纤对应的输出长度差值以测距系统分辨率的1.5倍倍增;y型阵列光纤13和耦合透镜12的间距13.5mm;阵列接收系统的数值口径小于0.22;且焦距不小于2350mm。
12.优选地,所述y型阵列光纤13输入端由7根多模光纤组成,光纤阵列输入端由上述7
根光纤的输入端绕圆心均匀排列构成,输入端每根光纤芯经62.5um,数值口径0.22,相邻光纤中心间距125um;每根光纤分成2路,单根光纤输入端为fn,经输入端后输出的两根光纤长度分别为ln和l
′n,长度差值δln=l
n-l
′n=0.5
×
n,n取1、2、3、4、5、6、7。
13.优选地,所述的光束变换正透镜8和光束变换扩束负透镜9间距700mm,两透镜焦点重合,正透镜与负透镜焦距长度的比值为5。
14.优选地,所述超导单光子探测器15为空间光耦合单根光纤或多根光纤输入的超导单光子探测器或盖格模式的雪崩光电二极管。
15.优选地,所述望远镜17有效通光口径为1.05m。
16.优选地,所述激光反射光路中的第一45度反射镜3、第二45度反射镜4、第三45度反射镜5、第四45度反射镜6、第五45度反射镜7,镀有532nm、1064nm双点点高反膜,且反射率不低于90%,抗损伤阈值不低于1gw/cm2。
17.本发明还提供一种激光测距主动跟踪装置,包括激光测距系统中主动跟踪装置包括望远镜、数据处理系统和望远镜指向修正系统;所述望远镜系统包括主镜2、副镜1、镜筒、地平式机架、力矩电机、伺服控制系统20,主镜2和副镜1安装在镜筒内,镜筒和折轴光路安装在地平式机架上,两个力矩电机分别安装在地平式机架高度轴和方位轴上,伺服控制系统20通过驱动力矩电机控制望远镜17指向,可根据y阵列光纤13中的位置偏差信息对望远镜指向进行修正。
18.本发明的有益效果是:本发明利用光纤阵列接收回波,当搜索到回波光路的信号时,计算出接收到回波信号的光纤位置,并将位置偏差反馈给望远镜伺服控制系统,实现对目标的主动跟踪,这对提高激光测距系统的监测能力具有重要意义。
附图说明
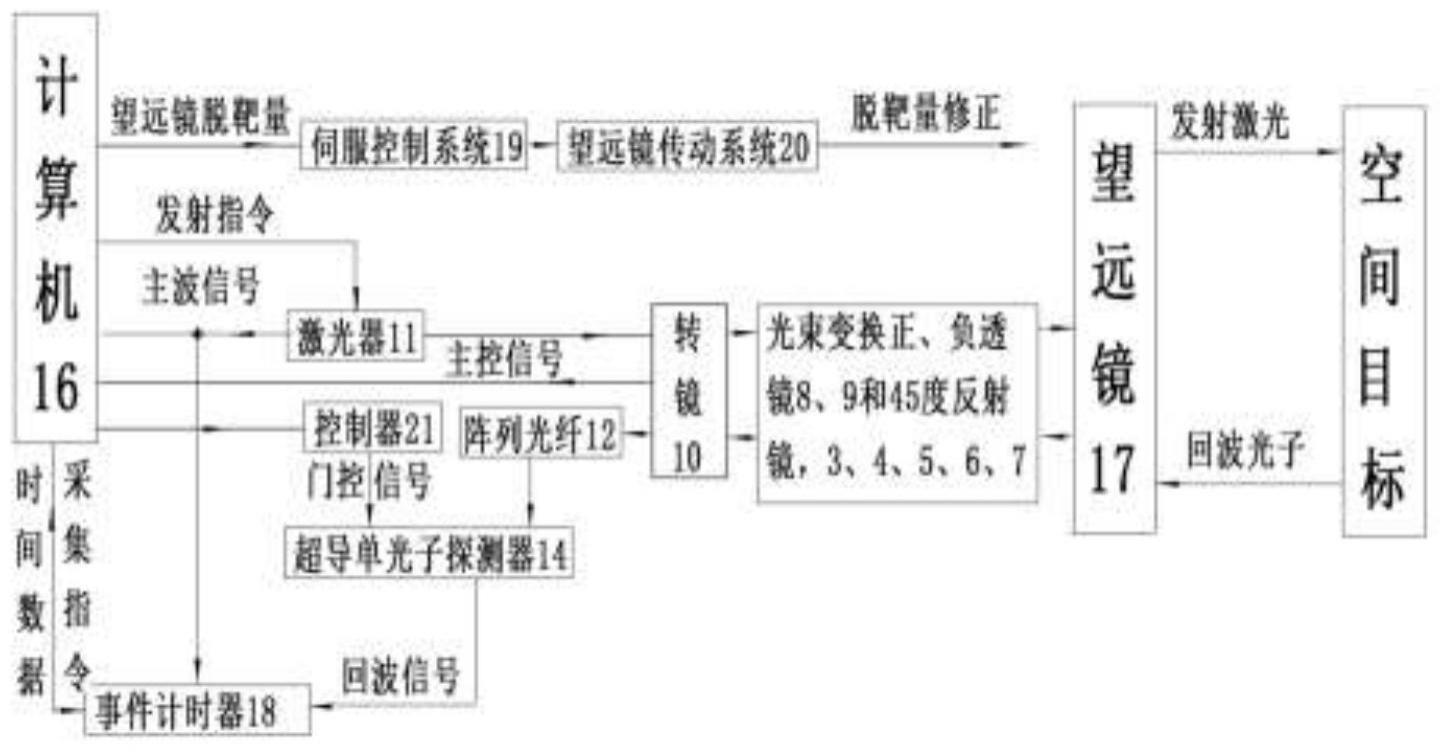
19.图1为本发明的激光测距的结构示意图;
20.图2为本发明的激光测距系统光路示意图;
21.图3为本发明的阵列光纤示意图;
22.图4为本发明的阵列光纤对应关系图;
23.其中,1-副镜、2-主镜、3-第一45度反射镜、4-第二45度反射镜、5-第三45度反射镜、6-第四45度反射镜、7-第五45度反射镜、8-光束变换正透镜、9-光束变换负透镜,10-转镜,11-激光器,12-光纤耦合透镜,13-阵列光纤,14-fc/pc光纤接头,15-超导单光子探测器、16-计算机、17-望远镜、18-事件计时器、19-伺服控制系统、20-望远镜传动系统、21-控制器。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例
26.本实施例提供一种激光测距主动跟踪装置,包括望远镜、数据处理系统和望远镜
指向修正系统;所述望远镜系统包括主镜2、副镜1、镜筒、地平式机架、力矩电机、伺服控制系统20,主镜2和副镜1安装在镜筒内,镜筒和折轴光路安装在地平式机架上,两个力矩电机分别安装在地平式机架高度轴和方位轴上,伺服控制系统20通过驱动力矩电机控制望远镜17指向,可根据y阵列光纤13中的位置偏差信息对望远镜指向进行修正。
27.外触发信号控制激光器发射激光,激光经分光镜分光,一部分入射到光电二极管,经光电二极管光电转换后输出的电信号被多通道事件计时器记录,该时刻为激光发射时刻;另一部分激光经反射镜、扩束镜组、库德光路反射镜后、发射望远镜后向被测目标发射。
28.经目标反射后的激光传输至望远镜,并经过光路反射镜、缩束镜组、转镜、光束变换镜组后入射到光纤耦合透镜,阵列光纤前端面放置于光纤耦合透镜的焦点位置,经耦合透镜聚焦的光束耦合进入阵列光纤。
29.阵列光纤前端面排列形式是中间一根,周围环列6根,并且每根光纤分成两路,其相对长度差值不同。不同光纤接收到的光信号入射到单光子探测器并输出电信号,利用多通道时间计时器记录回波到达时刻。
30.将激光发射时刻与回波接收时刻的差值与目标预报进行差值计算,因为每根y型光纤的相对长度不同,所以可以根据测量到的时间延迟判断出回波光束在阵列光纤的位置,根据位置信息能够对望远镜的指向提供修正数据。
31.当获得望远镜指向修正数据后,将该数据传输给望远镜伺服控制系统,对望远镜的指向进行修正。
32.如图1所示,本实施例还提供了包括设置在超导单光子探测器和望远镜之间的接收光路;激光经过的发射光路包括第一45度反射镜、第二45度反射镜、第三45度反射镜、第四45度反射镜、第五45度反射镜、光束变换正透镜、光束变换扩束负透镜、转镜以及激光器;反射后的光线经过所述接收光路包括第一45度反射镜、第二45度反射镜、第三45度反射镜、第四45度反射镜、第五45度反射镜、光束变换正透镜、光束变换扩束负透镜、转镜、光纤耦合透镜、阵列光纤、fc/pc光纤接头和超导单光子探测器;
33.设于超导单光子探测器和光纤耦合透镜的阵列接收系统,所述阵列接收系统包括耦合透镜和y型阵列光纤;
34.所述y型阵列光纤的输入端为中心一根,周围均匀排列的6根多模光纤构成;每根光纤分成两路输出,且输出光纤长度不同,每根光纤对应的输出长度差值以测距系统分辨率的1.5倍倍增;y型阵列光纤和光纤耦合透镜的间距13.5mm;阵列接收系统的数值口径小于0.22,且焦距不小于2350mm。
35.所述y型阵列光纤输入端由7根多模光纤组成,光纤阵列输入端由上述7根光纤的输入端绕圆心均匀排列构成,输入端每根光纤芯经62.5um,数值口径0.22,相邻光纤中心间距125um;每根光纤分成2路,单根光纤输入端为fn,经输入端后输出的两根光纤长度分别为ln和l
′n,长度差值δln=l
n-l
′n=0.5
×
n,n取1、2、3、4、5、6、7。
36.如图4,单根光纤输入端为fn,经输入端后输出的两根光纤长度分别为ln和l
′n,长度差值δln=l
n-l
′n=0.5
×
n,n取1、2、3、4、5、6、7。
37.即当n=1时,对应的输入端为f1,长度差值δl1=l
1-l
′1=0.5
×
1=0.5m
……
式1
38.当n=2时,对应的输入端为f2,长度差值δl2=l
2-l
′2=0.5
×
2=1m
……
式2
39.以此类推
40.当n=7时,对应的输入端为f7,长度差值δl7=l
7-l
′7=0.5
×
7=3.5m
……
式3
41.回波光束经第n个光纤输入端后分成两路输出,光纤长度为ln和ln
′
。
42.具体地,共7个输入端口,输出为14根光纤。
43.光纤长度差值分别为0.5m的整数倍,如式1,式2、式3所述,,14根支路光纤融合为一根多模光纤f0输出,f0与单光子探测器链接,阵列光纤示意图如图4所示。
44.阵列光纤的输入端由上述7根光纤的输入端绕圆心均匀排列构成,输入端每根光纤芯经62.5um,数值口径0.22,相邻光纤中心间距125um,如图3-4所示,
45.阵列光纤输入端由f1、f2、f3、f4、f5、f6、f7共7根多模光纤组成,光纤芯经62.5um,数值口径0.22,相邻光纤中心间距125um。每根光纤分成2路,长度差值分别为0.5m的整数倍,f1对应的长度差值取0.5m,f2、f3、f4、f5、f6、f7长度差值分别为1m、1.5m、2m、2.5m、3m、3.5m,14根支路光纤融合为一根多模光纤f0输出。f1-l0—l7根长度也可不同l1-l7各1根,
46.回波光束经第n个光纤输入端后分成两路输出,光纤长度为ln和l
′n。本例中共7个输入端口,输出为14根光纤。光纤长度差值分别为0.5m的整数倍,如式1,式2、式3所述,,14根支路光纤融合为一根多模光纤f0输出,f0与单光子探测器链接,阵列光纤示意图如图3所示。
47.本实施例中,具体地,
48.光束变换正透镜和光束变换扩束负透镜的间距700mm,两透镜焦点重合,正透镜与负透镜焦距长度的比值为5。
49.所述超导单光子探测器为空间光耦合单根光纤或多根光纤输入的超导单光子探测器或盖格模式的雪崩光电二极管。
50.所述望远镜的有效通光口径为1.05m。
51.激光反射光路中的第一45度反射镜、第二45度反射镜、第三45度反射镜、第四45度反射镜、第五45度反射镜,镀有532nm、1064nm双点点高反膜,且反射率不低于90%,抗损伤阈值不低于1gw/cm2。
52.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1