基于PPP-B2b的实时高精度时间传递方法及装置
基于ppp-b2b的实时高精度时间传递方法及装置
技术领域
1.本技术涉及卫星时间传递技术领域,特别是涉及一种基于ppp-b2b的实时高精度时间传递方法及装置。
背景技术:
2.时间传递在国民经济和国防建设具有重要的作用,基于全球卫星导航系统(global navigation satellite system,gnss)的时间传递是高精度时间传递手段之一,能够提供全球范围内全天候、全天时、高精度的定位、导航和授时(positioning,navigation and timing,pnt)服务。早期gnss时间传递根据伪距观测值和广播星历数据计算时间传递结果,受伪距噪声高、广播星历精度差等因素限制,时间传递精度较差,只达到优于百纳秒的水平。而gnss时间传递自由灵活,不受时间和空间条件的限制,在时间尺度维持、科学实验、网络通信、电子系统协同作战等领域均有广泛应用。
3.精密单点定位(precise point positioning,ppp)技术是一种高精度的定位技术,可以利用单台接收机接收到的伪距和载波相位观测值,并利用精确的误差改正模型修正各项测量误差得到高精度的位置坐标和钟差参数。它可以提供厘米级到分米级的定位服务,但受限于轨道和钟差产品的延迟性,早期仅适用于事后处理模式。在时间传递方面,国际计量局最早研究利用载波相位和伪距观测值进行时间传递研究,证明ppp时间传递精度可以达到亚纳秒量级,可被用于洲际时间传递与协调世界时维持。
4.随着ppp技术的发展,5g通信、滑坡监测和高精度时间同步等应用的实时性需求,要求轨道和钟差具有更高的实时性和精度。于是,国际gnss服务组织(international gnss service,igs)在2007年启动了rpp工程(real-time pilot project),并在2013年开放了rts服务(real-time service),可以通过网络以rtcm(radio technical commission for maritime service)信息格式ntrip(network transport of rtcm over the internet protocol)协议为用户提供实时的卫星轨道和钟差改正数据,这为实时ppp时间传递奠定了基础。但是igs rts服务依赖于通讯网络,一旦网络中断就会导致无法进行正常的工作;同时,通讯网络设施的铺设成本较高,并受限于地形地貌。因此,星际增强服务是解决此类问题的一种有效途径,通过卫星实时的播发轨道和钟差改正数据,能够实现全天候、全天时、全球范围的ppp服务。
5.为促进我国实时ppp服务应用,北斗三号卫星系统于2020年10月正式开通了星际增强服务和星基精密星历播发服务,依托北斗的球同步轨道卫星,在b2b频点向亚太地区乃至全球范围播发星基增强改正信息,面向全球的实时播发服务为北斗实时ppp时间传递研究提供了基础保障。目前,北斗三号由3颗geo卫星,24颗meo卫星和3颗igso卫星组成,在保留北斗二号b1i和b3i信号的基础上,增加了b1c、b2a和b2b信号。ppp-b2b信号可以为北斗cnav1和gps lnav广播星历提供差分信息。主要包括卫星掩码(包含在信息类型1)、用户测距精度(包含在信息类型2)、轨道改正数(包含在信息类型2)、码间偏差改正数(包含在信息类型3)和钟差改正数(包含在信息类型4)。在此背景下,设计了一种基于ppp-b2b信号的高
精度时间传递方法。
技术实现要素:
6.基于此,有必要针对上述技术问题,提供一种能够实时进行时间传递的基于ppp-b2b的实时高精度时间传递方法及装置。
7.一种基于ppp-b2b的实时高精度时间传递方法,所述方法包括:
8.获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
9.对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
10.利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
11.根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
12.计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
13.在其中一实施例中,ppp-b2b信号由思南k803板卡接收得到。
14.在其中一实施例中,根据权利要求1所述的实时高精度时间传递方法,其特征在于,对所述ppp-b2b信号进行解码,并对其进行数据版本号匹配后得到匹配后的ppp-b2b信号包括:先对所述ppp-b2b信号进行解码,在解码的同时对iod srr以及iodp进行匹配,再对解码后ppp-b2b信号中的改正数进行iod cor的匹配,最后对ppp-b2b信号的iodn与广播星历的iodc进行匹配,得到匹配后的ppp-b2b信号。
15.在其中一实施例中,所述匹配后的ppp-b2b信号的改正数包括分别对所述广播星历轨道以及卫星钟差进行修正的卫星轨道改正数以及钟差改正数。
16.在其中一实施例中,利用所述卫星轨道改正数对所述广播星历轨道进行修正得到精密广播星历轨道包括:
17.将所述卫星轨道改正数转化为地心固坐标系中,转化公式表示如下:
[0018][0019]
在上式中,δo=[δo
r δo
a δoc]
t
为ppp-b2b信号中获得的卫星轨道改正向量,r、a和c分别表示径向、切向和法向,er、ea和ec分别表示径向、切向和法向单位方向矢量,计算方法如下:
[0020][0021][0022]
ea=ec×er
[0023]
在上式中,r和分别表示广播星历卫星位置矢量和速度矢量;则结合上面两个公式,修正后的精密广播星历轨道为:
[0024][0025]
在上式中,为修正前的广播星历轨道。
[0026]
在其中一实施例中,利用所述卫星轨道改正数对所述卫星钟差进行修正得到精密卫星钟差,采用以下公式:
[0027][0028]
在上式中,表示修正后的精密卫星钟差,表示由广播星历计算得到的卫星钟差参数,c0表示ppp-b2b信号中获得的钟差改正数,c表示光速。
[0029]
在其中一实施例中,两个观测站接收的伪距和载波相位观测值分别为北斗三b1i/b3i和gps l1/l2消电离层双频组合观测数据。
[0030]
一种基于ppp-b2b的实时高精度时间传递装置,所述装置包括:
[0031]
数据获取模块,用于获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0032]
ppp-b2b信号解码和匹配模块,用于对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0033]
数据修正模块,用于利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0034]
接收机钟差估计模块,用于根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0035]
时间传递结果实时解算模块,用于计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0036]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0037]
获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0038]
对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0039]
利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0040]
根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0041]
计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0042]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
[0043]
获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0044]
对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0045]
利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0046]
根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0047]
计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0048]
上述基于ppp-b2b的实时高精度时间传递方法及装置,通过利用实时获取的ppp-b2b信号对北斗三卫星以及gps卫星发送的广播星历数据进行修正,得到精密的广播星历轨道以及卫星钟差,再根据精密广播星历轨道以及卫星钟差、北斗三卫星以及gps卫星发送的伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差,并计算两个观测站中接收机钟差之间的差值,得到实时时间传递的结果。本方法无需铺设大量的地面设施,减低了成本的同时更加自由灵活,可适用于多个应用场景。
附图说明
[0049]
图1为一个实施例中基于ppp-b2b的实时高精度时间传递方法的流程示意图;
[0050]
图2为一个实施例中对ppp-b2b的iod匹配策略流程示意图;
[0051]
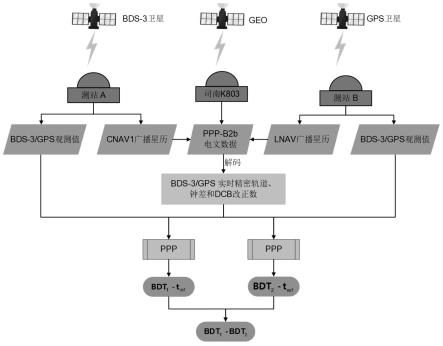
图3为一个实施例中基于ppp-b2b的实时高精度时间传递方法的流程框架示意图;
[0052]
图4为一实验中基于ppp-b2b进行时间传递结果的a类不确定度示意图;
[0053]
图5为一实验中各链路ppp-b2b时间传递结果的频率稳定度示意图;
[0054]
图6为另一实验在观测条件受限情况下流程示意图;
[0055]
图7为另一实验中不同截止高度角下tlm2-usud链路的ppp-b2b时间传递结果示意图;
[0056]
图8为另一实验中tlm2和usud站在不同截至高度角下的pdop值示意图;
[0057]
图9为另一实验中不同截至高度角下ppp-b2b时间传递的a类不确定度示意图;
[0058]
图10为另一实验中各链路时间传递结果的频率稳定度示意图;
[0059]
图11为一实验中基于ppp-b2b的实时高精度时间传递装置的结构框图;
[0060]
图12为一个实施例中计算机设备的内部结构图。
具体实施方式
[0061]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0062]
如图1所示,提供了一种基于ppp-b2b的实时高精度时间传递方法,包括以下步骤:
[0063]
步骤s100,获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫
星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0064]
步骤s110,对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0065]
步骤s120,利用匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中广播星历数据包括广播星历轨道以及卫星钟差;
[0066]
步骤s130,根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0067]
步骤s140,计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0068]
针对目前暂时还没有支持北斗三的时间传递系统,在此背景下急需一种支持北斗三的时间传递系统。基于ppp-b2b信号的时间传递是通过北斗三geo卫星实时播发的ppp-b2b信号,延迟性更低,几乎为零延迟,因此基于ppp-b2b信号进行时间传递是实时的。并且,ppp-b2b信号可以为亚太地区体统全天候、全天时、高精度的实时ppp服务,具有更广的服务范围和性能。其次,ppp-b2b信号能够覆盖海洋、沙漠秦岭和高原等地区,能够为服务范围能的所有用户提供时间传递服务,不受地形地貌的影响。ppp-b2b通过geo卫星进行播发,用户端利用单个接收机就行能够实现信号的接受和处理,成本较低,同时克服了通讯网络故障导致无法正常进行时间传递的缺点。
[0069]
在本实施例中,ppp-b2b信号由思南k803板卡接收得到。
[0070]
在步骤s100中,除了通过思南k803板卡接收得到ppp-b2b信号,还由两个观测站分别接收北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据。
[0071]
在步骤s110中,先对ppp-b2b信号进行iod srr以及iodp的匹配,在匹配的同时对ppp-b2b信号进行解码,再对解码后ppp-b2b信号中的改正数进行iod cor的匹配,最后对ppp-b2b信号的iodn与广播星历的iodc进行匹配,得到匹配后的ppp-b2b信号。
[0072]
具体的,为了确保ppp-b2b信号不同信息类型之间能够相互匹配,保证各信息类型在标称有效期内,利用数据版本号(iod)对信息进行标识,iod包括iod srr(state space representation,ssr)、iodp、iodn和iod corr。iod的匹配策略如图2所示。其中,iod srr表示状态空间数据的版本号,包含在各信息类型,只有不同信息类型的iod srr保持相同时,ppp-b2b数据才能够进行使用;iodp表示卫星掩码的数据版本号,包含在信息类型1和4中,用户可以用它来判断信息类型1和4是否相匹配;iodn表示gnss下行信号播发的星钟和星历的版本号,包含在信息类型2中,可以用来判断ppp-b2b数据是否与广播星历数据相匹配;iod corr表示轨道和钟差改正数的版本号,包含在信息类型2和4中,可以用来判断二者是否相匹配。
[0073]
在本实施例中,ppp-b2b信号中包括卫星掩码(包含在信息类型1)、用户测距精度(包含在信息类型2)、轨道改正数(包含在信息类型2)、码间偏差改正数(包含在信息类型3)和钟差改正数(包含在信息类型4)。其中,利用轨道改正数以及钟差改正数分别对广播星历轨道以及卫星钟差进行修正。
[0074]
具体的,ppp-b2b信号提供的卫星轨道改正数包括径向、切向和法向改正分量。由于广播星历提供的是地心地固坐标系(earth-center earth-fixed,ecef)的卫星轨道位置,因此首先需要将ppp-b2b卫星轨道改正数转化到ecef坐标系中,转化公式表示为如下形式将所述卫星轨道改正数转化为地心固坐标系中,转化公式表示如下:
[0075][0076]
在公式(1)中,δo=[δo
r δo
a δoc]
t
为ppp-b2b信号中获得的卫星轨道改正向量,r、a和c分别表示径向、切向和法向,er、ea和ec分别表示径向、切向和法向单位方向矢量,计算方法如下:
[0077][0078]
在公式(2)中,r和分别表示广播星历卫星位置矢量和速度矢量;则结合上面两个公式,修正后的精密广播星历轨道(也就是精密卫星位置坐标)为:
[0079][0080]
在公式(3)中,为修正前的广播星历轨道。
[0081]
具体的,应用ppp-b2b钟差改正数对广播星历钟差进行改正,可以得到精密卫星钟差采用以下公式:
[0082][0083]
在公式(4)中,表示修正后的精密卫星钟差,表示由广播星历计算得到的卫星钟差参数,c0表示ppp-b2b信号中获得的钟差改正数,c表示光速。
[0084]
进一步的,在步骤s130中,根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差包括:
[0085]
根据单频伪距和载波相位观测方程对北斗三以及gps的观测方程进行推导,其中单频伪距和载波相位观测方程可以表示为:
[0086][0087][0088]
在公式(5)和公式(6)中,p和l分别表示伪距和载波相位观测值,单位为m;上标s和下表r分别表示卫星和接收机;i表示频率;表示卫星到接收机之间的几何距离(m),表示卫星坐标(也就是修正后的精密卫星位置坐标),[x
r y
r zr]表示接收机坐标;c表示光速(m/s);dt
r,i
和分别表示接收机和卫星钟差(s);t表示对流层延迟(m);γi为与频率相关的放大因子,γi=f
12
/f
i2
;i1表
示第一频点对应的电离层延迟(m);dr和ds分别表示接收机和卫星端伪距硬件延迟(m/s);λi表示fi频率对用的载波波长(m);br和bs分别表示接收机和卫星端载波相位硬件延迟(周);ni表示相位模糊度(周);εi和ζi分别表示伪距和载波相位观测噪声(m)。需要注意的是公式中已对相位缠绕、潮汐、相对论和卫星天线相位变化改正。
[0089]
在本实施例中,两个观测站接收的伪距和载波相位观测值分别为北斗三b1i/b3i和gps l1/l2消电离层双频组合观测数据。接下来为了方便起见,用1、3、4和5分别表示北斗b1i、b3i和gps l1、l2信号,定义一下符号:
[0090][0091]
在公式(7)中,α和β表示与频率相关的系数。
[0092]
在本实施例中,是利用bds-3b1i/b3i和gps l1/l2消电离层组合观测数据进行时间传递研究。而基于ppp-b2b信号进行时间传递时,提供的bds-3钟差以b3i信号为频率基准,而gps钟差以l1/l2组合信号为基准,即:
[0093]
对于gps卫星:
[0094][0095]
对于北斗三卫星:
[0096][0097]
则结合公式(8)和公式(9)应用到ppp-b2b信号进行时间传递时,公式(5)和公式(6)可改写为:
[0098][0099]
[0100]
在公式(10)和公式(11)中,
[0101]
则进一步的,基于公式(8)到(11),bds-3和gps消电离层组合观测方程可以进一步推导为:
[0102][0103][0104]
结合公式(13)和(14),待估参数为接收机坐标x=[x
r y
r zr](m),接收机钟差cdt
r,ifmn
(m),对流层t和模糊度参数则待估参数向量可以表示为:其中,cdt
r,ifmn
即为解算出来的接收机钟差。
[0105]
上述的基于ppp-b2b信号时间传递方法的实施步骤还如图3所示。
[0106]
为了验证基于ppp-b2b信号时间传递的性能,选取了中国及其周边区域五个观测站。收集了2022年4月2日至4月8日七天的观测数据、广播行李数据和ppp-b2b电文数据。根据ppp-b2b接口控制文件对rtklib软件进行二次开发,并对ppp算法进行了测试。选取了usud、mizu、tlm2、jfng和lck3五个观测站。其中,usud站为时间传递的中心节点。
[0107]
以后处理模式下gbm b1i/b3i观测数据的静态ppp时间传递结果为参考,对ppp-b2b时间传递性能进行测试分析。如图4所示,为ppp-b2b时间传递结果的a类不确定度。可以发现,ppp-b2b的时间传递结果std值都在1ns以内,其中,gps+bds-3时间传递性能最好,bds-3时间传递性能次之,gps时间传递性能最差(0.2-0.6ns)。造成以上结果的原因主要有两个:(1)gps的可视卫星数量较少,导致gps伪距残差较大;(2)对于ppp-b2b产品,gps的轨道和钟差产品的质量相对于bds-3较差。表1列出了与gps ppp-b2b时间传递结果相比bds-3和gps+bds-3时间传递结果的降幅。与gps ppp-b2b时间传递结果std相比,bds-3和gps+bds-3时间传递结果的std降幅范围分别为71.6%
–
82.0%和72.0%
–
82.6%,均值分别为76.9%和78.7%。实验结果表明,ppp-b2b可以提供亚纳秒级的时间传递,gps+bds-3时间传递性能最好,gps时间传递性能最差。
[0108]
表1与gps ppp-b2b时间传递结果相比bds-3和gps+bds-3时间传递结果的std值降幅(%)
[0109][0110]
频率稳定度是时间传递的另一重要指标,使用修正allan方差(mdev)计算频率稳定度。如图5所示,为ppp-b2b时间传递结果的mdev。gps、bds-3和gps+bds-3时间传递结果在不同的平滑时间具有较高的一致性。同时,频率稳定度随着平滑时间的增加而逐渐提高。同时可以发现,gps+bds-3时间传递结果的频率稳定度最好,与bds-3时间传递结果的频率稳
定度基本相同,gps时间传递结果的频率稳定度最差。ppp-b2b时间传递结果的一天频率稳定度优于10-12
,七天频率稳定度优于10-13
。实验结果表明,ppp-b2b具有较好频率传递性能。
[0111]
另外的,还在观测条件受限的情景下,验证本方法的有效性,如图6所示,为进行验证的流程图。
[0112]
在该情景下,双频消电离层组合ppp模型可以表示为:
[0113][0114][0115]
在公式(14)和(15)中,下标if表示消电离层组合;其他符号含义与公式(5)和(6)相同。
[0116]
考虑到ppp-b2b的服务范围的区域性以及真实环境中建筑物的遮挡情况,设置不同的截止高度角模拟“真实世界”来进行ppp-b2b时间传递实验。截至高度角设为10
°
、20
°
、30
°
和40
°
。为了避免当截至高度角较大时,可视卫星数量较少导致奇异值的出现和频繁的重收敛,这里进行gps+bds-3ppp-b2b时间传递进行研究。
[0117]
如图7所示,为不同截止高度角下tlm2-usud链路的ppp-b2b时间传递结果。当截至高度角为10
°
、20
°
和30
°
时,ppp-b2b时间传递结果的序列基本相互重叠,而截止高度角为40
°
时,具有较大的波动范围,这主要是由较差的卫星空间几何分布导致的。图8为tlm2和usud站在不同截至高度角下的pdop值。随着截止高度角的增加,pdop值逐渐增大。tlm2站10
°
、20
°
、30
°
和40
°
的平均pdop值分别为1.4、1.8、2.7和5.0,usud站10
°
、20
°
、30
°
和40
°
的平均pdop值分别为1.3、1.7、2.7和4.8。当截止高度角为40
°
是,pdop值变化较为剧烈。
[0118]
为了进一步对ppp-b2b时间传递性能进行分析,统计了不同截至高度角下ppp-b2b的a类不确定度,如图9所示。可以看出,随着高度角的增加,ppp-b2b时间传递性能有所下降。此外,当截至高度角在10度到30度之间时,std值都在0.2ns之内,且不同截至高度角的std值相差不大,而截至高度角为40度的std值变化较大。但是需要的注意的是,std值均在1纳秒以内。表2给出了与40
°
截至高度角下的时间传递相比10
°
、20
°
和30
°
截至高度角下时间传递性能的提升程度。与40
°
截至高度角下的时间传递相比,10
°
、20
°
和30
°
截至高度角下时间传递性能提升的范围分别为71.9%
–
80.6%、64.1%
–
78.1%和58.3%
–
74.5%,均值分别为76.1%、70.8%和67.8%。
[0119]
因此,从实验结果看,理论上在较低截止高度角下ppp-b2b时间传递性能较好,当截止高度角达到40
°
时,性能下降比较严重。且在观测条件受限较大的情况下ppp-b2b仍能提供亚纳秒级的时间传递服务。
[0120]
表2与40
°
截至高度角下的时间传递相比10
°
、20
°
和30
°
截至高度角下时间传递性能的提升程度(%)
[0121]
[0122]
如图10所示,给出了各时间链路的mdev。可以看出,在短期平滑时间内时间链路的频率稳定度没有显著差异。随着截止仰角的增大,长期频率稳定度降低。此外,在相同平滑时间下,tlm2-usud时间链路的频率稳定度优于其他时间链路。这主要是因为tlm2和usud站配备了更高性能的原子钟。截止高度角对时间传递结果的频率稳定度影响不大,一天的频率稳定度优于10-12
,七天的频率稳定度优于10-13
。
[0123]
上述基于ppp-b2b的实时高精度时间传递方法,不同于传统意义上的网络时间传递,本方法无需在参于时间传递的节点之间建立通讯网络,不会增加系统的通讯负担,只需要节点能够单向的接受导航卫星的观测数据和ppp-b2b信号,还避免了通讯网络中断的情况。同时,本方法采用ppp技术,能够对时间传递过程中的各项误差进行修正,提高了时间传递的性能;同时,无需铺设大量的地面设施,降低了成本的同时更加自由灵活。本方法还填补基于ppp-b2b的实时时间传递领域的空白。
[0124]
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0125]
在一个实施例中,如图11所示,提供了一种基于ppp-b2b的实时高精度时间传递装置,包括:数据获取模块200、ppp-b2b信号解码和匹配模块210、数据修正模块220、接收机钟差估计模块230和时间传递结果实时解算模块240,其中:
[0126]
数据获取模块200,用于获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星发送的伪距和载波相位观测值,以及广播星历数据;
[0127]
ppp-b2b信号解码与匹配模块210,用于对所述ppp-b2b信号进行解码,并对其进行数据版本号匹配后得到匹配后的ppp-b2b信号;
[0128]
数据修正模块220,用于利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0129]
接收机钟差估计模块230,用于根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0130]
时间传递结果实时解算模块240,用于计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0131]
关于基于ppp-b2b的实时高精度时间传递装置的具体限定可以参见上文中对于基于ppp-b2b的实时高精度时间传递方法的限定,在此不再赘述。上述基于ppp-b2b的实时高精度时间传递装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0132]
在一个实施例中,提供了一种计算机设备,该计算机设备可以是终端,其内部结构图可以如图12所示。该计算机设备包括通过系统总线连接的处理器、存储器、网络接口、显示屏和输入装置。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的
存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种基于ppp-b2b的实时高精度时间传递方法。该计算机设备的显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
[0133]
本领域技术人员可以理解,图12中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
[0134]
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:
[0135]
获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0136]
对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0137]
利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0138]
根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0139]
计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0140]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0141]
获取实时的ppp-b2b信号,以及由两个观测站分别实时接收到北斗三卫星以及gps卫星播发的伪距和载波相位观测值,以及广播星历数据;
[0142]
对所述ppp-b2b信号进行解码得到导航电文信息,并对不同信息类型的数据版本号进行匹配以保证不同信息类型所播发的改正数之间的关联性;
[0143]
利用所述匹配后的ppp-b2b信号的改正数对所述广播星历数据进行修正,得到修正后的精密广播星历数据,其中所述广播星历数据包括广播星历轨道以及卫星钟差;
[0144]
根据精密广播星历轨道以及精密卫星钟差、伪距和载波相位观测值采用精密单点定位算法分别实时估计两个观测站中接收机的钟差;
[0145]
计算两个观测站中接收机钟差之间的偏差,得到实时时间传递的结果。
[0146]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,
诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0147]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0148]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1