一种针对分布式雷达的自校准方法与流程
1.本发明涉及雷达技术领域,特别涉及一种针对分布式雷达的自校准方法。
背景技术:
2.fmcw(frequency modulated continuous wave,调频连续波)雷达具有结构简单,体积小、易于使用的优点,被广泛应用在物体检测、动作识别、自动驾驶等领域。受制于政策和工艺的限制,fmcw雷达的发射功率往往比较小,这导致单个雷达的探测范围有限,对部分雷达波反射能力较弱的目标,往往探测效果不佳。通过多部fmcw雷达组成的分布式雷达系统能够实现探测区域的增大和目标探测性能的提升。组成分布式雷达系统的每个雷达节点的空间位置互不相同,每个雷达节点的数据无法被直接利用。因此,实现对分布式雷达网络的数据进行校准具有重要意义。
3.专利号为202111586447.8的专利,它提出一种分布式雷达网络,通过将控制模块连接到多个雷达收发器中的通信总线,并结合时钟信号实现对每个雷达节点的数据同步。但这种方法会限制分布式雷达系统的布置方式和范围,同时增加硬件成本。
4.专利号为202110832937.5的专利,它提出一种分布式雷达目标定位方法,通过将目标位置估计转化为非线性约束优化问题,进行实现目标位置参数的求解。但这种方法需要事先获取不同雷达节点的位置参数,但是在部分情况下,位置参数的测量难度较大。
技术实现要素:
5.本技术通过提供一种针对分布式雷达的自校准方法,以解决现有技术中分布式雷达系统之间校准较难的问题,实现了自适应估计和校准每部雷达的位置。
6.本技术实施例提供了一种针对分布式雷达的自校准方法,包括以下步骤:
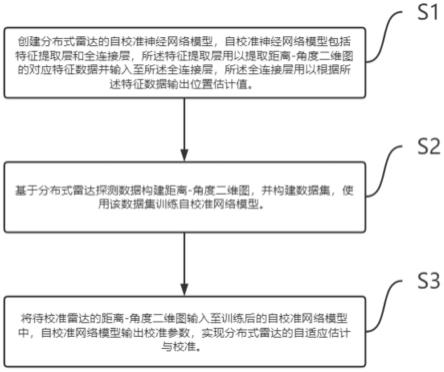
7.s1:创建分布式雷达的自校准神经网络模型,所述自校准神经网络模型包括特征提取层和全连接层,所述特征提取层用以提取距离-角度二维图的对应特征数据并输入至所述全连接层,所述全连接层用以根据所述特征数据输出位置估计值;
8.s2:基于分布式雷达探测数据构建所述距离-角度二维图,并构建数据集,使用所述数据集训练所述自校准网络模型;
9.s3:将待校准雷达的所述距离-角度二维图输入至训练后的所述自校准网络模型中,所述自校准网络模型输出校准参数,实现分布式雷达的自适应估计与校准。
10.上述实施例的有益效果在于:预建立自校准神经网络模型,将待校准雷达的所述距离-角度二维图输入至训练后的所述自校准网络模型中,所述自校准网络模型快速输出校准参数,实现分布式雷达的自适应校准,该自校准方法可快速自适应估计和校准每部雷达的位置,提高分布式雷达的探测精度。
11.在上述实施例基础上,本技术可进一步改进,具体如下:
12.在本技术其中一个实施例中,所述特征提取层包含卷积层、池化层、批归一化层和激活层一,所述全连接层包括展平层、线性层和激活层二,所述卷积层和池化层用以提取所
述特征数据,所述批归一化层用以对所述特征数据进行归一化处理,所述激活层一、激活层二用以对所述特征数据施加非线性特征,所述展平层用以将所述特征数据化为一维数据,所述线性层用以对所述一维数据进行线性变换处理。距离-角度二维图经过卷积层和池化层提取特征,再经批归一化层,实现特征图的批归一化,经过激活层一的非线性处理后输入全连接层中,最终经过展平层、线性层和激活层二,输出每部雷达相对位置的估计值。
13.在本技术其中一个实施例中,所述卷积层由c个卷积核组成,每个卷积核的尺寸为n*n,卷积核每次移动的步长为s,输入数据边缘使用0填充的数量为p,则经过卷积层处理后的特征图尺寸为
[0014][0015]
其中,input表示输入数据的尺寸,output表示输出数据的尺寸,输出数据的通道数为c。卷积层用以快速准确提取每部雷达中距离-角度二维图所对应的特征数据。
[0016]
在本技术其中一个实施例中,所述批归一化层的归一化处理公式如下:
[0017][0018][0019][0020]
其中,x为输入的所有样本,xi表示样本中的一个数据,m表示神经网络每一次读取的样本数,e(x)表示样本均值,var(x)表示样本方差,x
input
表示批归一化层的输入数据,x
output
表示批归一化层的输出数据,ε为设定值。ε为一个很小的常量,避免分母为0的异常,批归一化层通过计算输入数据的均值和方差,对输入数据进行归一化,以解决自校准网络中数值不稳定的问题,提高自校准网络的稳定性和收敛速度。
[0021]
在本技术其中一个实施例中,所述自校准神经网络模型包括三个所述特征提取层和一个所述全连接层。第三层特征提取层的输出结果作为全连接层的输入,从而提高特征提取精度。
[0022]
在本技术其中一个实施例中,所述步骤s2中,使用所述数据集训练所述自校准网络模型,具体如下:
[0023]
将所述数据集划分为训练集和验证集,基于所述训练集,计算所述自校准网络模型的损失函数,公式如下:
[0024][0025]
其中,loss表示所述损失函数,output表示所述神经网络模型对训练集的预测后输出的校准参数,所述校准参数为雷达之间的距离,label表示所述训练集的真实值,n表示一次性输入到网络中的样本数量,∑表示求和,||表示取绝对值;
[0026]
再基于梯度反向传播算法和所述损失函数,优化自校准网络参数,经所述验证集
验证后得到训练后的所述自校准网络模型。
[0027]
在本技术其中一个实施例中,所述步骤s2中,所述数据集构建方式如下:
[0028]
分别确定多个目标相对于一部雷达的距离、角度;
[0029]
分别计算出多个所述目标相对于另一部雷达的距离和角度;
[0030]
将所有所述目标的距离、角度叠加,获得每一部雷达的距离-角度图;
[0031]
不同雷达的距离-角度图和与其对应的雷达之间的真实距离共同构成训练网络所需的数据集;
[0032]
其中,目标相对于不同雷达的距离和角度通过以下公式计算:
[0033][0034][0035]
其中,r和r1表示目标与不同雷达之间的距离,θ和θ1表示目标与不同雷达之间的角度,l表示雷达之间的距离。
附图说明
[0036]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
[0037]
图1为本发明提供的针对分布式雷达的自校准方法的流程;
[0038]
图2为本发明提供的自校准神经网络模型的结构示意图;
[0039]
图3为实例中使用的距离-角度图一;
[0040]
图4为实例中使用的距离-角度图二;
[0041]
图5为两部不同雷达的距离-角度图融合后的示意图。
具体实施方式
[0042]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围本发明提供一种针对分布式雷达的数据融合自校准方法。
[0043]
本发明提供一种针对分布式雷达的数据融合自校准方法,雷达设备主要包括天线模块、射频模块和数据处理模块,其中,天线模块用于发射和接收信号,射频模块用于实现信号的生成和频率的改变,数据处理模块用于对射频模块输出的原始信号进行采集和处理。本发明提供的雷达设备不需要同步和定位测距功能模块。
[0044]
本发明提供的一种针对分布式雷达的自校准方法,图1是本发明所提出的方法的整体实施流程。
[0045]
在本发明的实施流程中,包括以下步骤:
[0046]
s1:创建分布式雷达的自校准神经网络模型,自校准神经网络模型包括特征提取层和全连接层,所述特征提取层用以提取距离-角度二维图的对应特征数据并输入至所述全连接层,所述全连接层用以根据所述特征数据输出位置估计值。
[0047]
该自校准神经网络模型可以通过pytorch、tensorflow等神经网络环境进行搭建。雷达设备的特征在于,包括天线模块、射频模块和数据处理模块等功能模块,并且不需要信号同步和定位测距等功能。
[0048]
经过参数优化后的自校准神经网络模型通过输入雷达的距离-角度图可以实现对雷达之间距离的预测。假设当前需要估计雷达a和雷达b之间的距离,雷达a和b的参数设置相同,其距离-角度图的尺寸为x*y,x表示雷达在距离维度的采样点数量,y表示雷达在角度维度的采样点数量,则雷达a和b输入到模型中的数据尺寸分别应为n*1*x*y,其中,n为模型每一次读取的数据大小。首先将雷达a和b输入的距离-角度图所形成的张量沿着第二维拼接到一起,拼接后的输入数据尺寸应为n*2*x*y,经过拼接后的输入数据作为模型后续处理的原始数据。
[0049]
自校准神经网络模型的特征提取层对待处理的原始数据进行特征提取,特征提取层包括卷积层、池化层、批归一化层和激活层一。
[0050]
卷积层由c个卷积核组成,每个卷积核的尺寸为n*n,卷积核每次移动的步长为s,输入数据边缘使用0填充的数量为p,则经过卷积层处理后的特征图尺寸为
[0051][0052]
式(1)中,input表示输入数据的尺寸,output表示输出数据的尺寸,输出数据的通道数为c。
[0053]
经过卷积层处理的特征图再次经过池化层进行特征的增强,提高模型对特征之间相对位置信息的理解。池化层与卷积层类似,每一个池化层由池化核组成,每个池化核在特征图上移动,按照一定的规则对特征图进行处理,在本实例中,池化核选用最大池化规则,该规则下,池化核会保留自己覆盖范围内的最大值,并将其他值丢弃。经过池化层处理的特征图,其尺寸的计算方式与卷积层相同,唯一的不同点在于池化层的输入数据和输出数据的通道数相同。
[0054]
池化层输出的特征图被输入到批归一化层,批归一化层通过计算输入数据的均值和方差,对输入数据进行归一化,以解决网络中数值不稳定的问题,提高网络的稳定性和收敛速度。均值和方差的计算由如下公式确定
[0055][0056][0057]
式(2)、(3)中,x为神经网络每一次输入的所有样本,xi表示神经网络每一次输入的所有样本中的某一个数据,m表示神经网络每一次读取的样本数,e(x)表示样本均值,var(x)表示样本方差,经过批归一化层处理的特征图,其输出数值由以下公式确定
[0058][0059]
式(4)中,x
input
表示批归一化层的输入数据,x
output
表示批归一化层的输出数据,ε为设定值。ε为一个很小的常量,例如取值为0.0001,其作用是避免出现分母为0的异常。
[0060]
激活层一对经过批归一化处理的特征图施加非线性特征,在本实例中,使用修正线性单元(relu)作为激活函数。激活层的输出作为特征提取层的结果。在本实施例中,自校准神经网络模型包括三个特征卷积层和一个全连接层。第三层特征提取层的输出结果作为全连接层的输入。
[0061]
全连接层由展平层、线性层和激活层二组成。展平层多维的输入数据矢量化为一维数据。线性层为输入数据做一次线性变换,该过程可以通过如下公式表示:
[0062]
y=xa
t
+b
ꢀꢀꢀꢀ
(5)
[0063]
式(5)中,y表示线性层的输出,x表示线性层的输入,a表示线性层的参数组成的矩阵,()
t
表示转置,b表示偏置,为一个可学习的参数。在本实例中,激活层二选择relu作为激活函数。图2为本实例的网络结构图。
[0064]
s2:基于分布式雷达探测数据构建距离-角度二维图,并构建数据集,使用该数据集训练自校准网络模型。
[0065]
对网络参数的优化通过反向传播算法实现。网络参数的优化目标为缩小自校准网络模型的预测值与真实值之间的差异。在本实例中,使用平均绝对值误差对预测值和真实值之间的距离进行衡量,该结果作为损失函数,平均绝对值误差的损失函数通过如下公式计算:
[0066][0067]
式(6)中,n表示神经网络每一次读取的样本数量,output表示神经网络模型对训练集的预测后输出的校准参数,校准参数为雷达之间的距离,label表示真实值,loss表示损失函数,||表示取绝对值。在本实例中,使用随机梯度下降法对网络参数进行优化。
[0068]
在本实例中,通过对两个位置不同的雷达探测目标时的回波信号进行仿真,生成自校准网络模型需要的数据集,将所述数据集划分为训练集和验证集。在数据集的生成过程中,首先确定目标相对于某一部雷达的距离、角度,随后计算出该目标相对于另一部雷达的距离和角度,目标相对于不同雷达的反射截面积可以随机生成,目标相对于不同雷达的距离和角度通过以下公式计算:
[0069][0070][0071]
式(7)、(8)中,r和r1表示目标与不同雷达之间的距离,θ和θ1表示目标与不同雷达之间的角度,l表示雷达之间的距离。生成多个相对于某一部雷达具有不同的距离和角度的目标,通过公式计算不同雷达间距下这些目标相对于另一部雷达的距离和角度。将所有目
标叠加,得到每一部雷达的距离-角度图。不同雷达的距离-角度图和与其对应的雷达之间的真实距离共同构成训练网络所需的数据集。
[0072]
通过训练集对自校准网络模型进行训练,待神经网络的损失函数收敛后,结合验证集对自校准网络模型进行验证。通过验证后即可对不同雷达之间的距离进行预测。图3和图4为本实例中使用的距离-角度图。图5为将来自两部不同雷达的距离-角度图融合后的结果。
[0073]
s3:将待校准雷达的距离-角度二维图输入至训练后的自校准网络模型中,自校准网络模型输出校准参数,实现分布式雷达的自适应估计与校准。
[0074]
该参数表示雷达之间的距离,结合自校准网络模型的输出和公式(7)、(8),可以实现目标相对于不同的雷达的距离和角度的转换,从而实现分布式雷达的自适应估计与校准。
[0075]
下表1为已有论文与本专利提出的方法的性能对比。方法1为s.li,j.guo,r.xi,c.duan,z.zhai,y.he,pedestrian trajectory based calibration for multi-radar network,ieee infocom 2021,may 2021.该方法观测测试人员在两部雷达的重叠观测区域的运动轨迹,通过将运动轨迹简化为直线,并计算同样的轨迹在不同雷达生成的直线的斜率和位置的差异,实现对雷达外参的校准。方法2为s.iwata,t.koda and t.sakamoto,multiradar data fusion for respiratory measurement of multiple people,ieee sensors journal,vol.21,no.22,pp.25870-25879,november,2021.该方法通过对测试人员的呼吸特征进行提取,从而实现对相同目标的定位,相同的目标在不同雷达中具有不同的位置,结合普鲁克分析计算相同目标在不同雷达之间的仿射变换,达到估计雷达外参的目的。方法3为a.shastri,m.canil,j.pegoraro,p.casari and m.rossi,mmscale:self-calibration of mmwave radar networks from human movement trajectories,2022ieee radar conference,march,2022.该方法考虑了不同雷达节点之间的时间同步,通过将时间校准误差引入代价函数,该方法实现了对运动目标的轨迹的自动关联。这些方法均需通过观测运动目标进行在线校准,极大地限制了应用场景。
[0076]
表1本专利所提方法与其他方法的性能对比
[0077]
对比方法方法1方法2方法3所提方法误差(米)0.0870.10.180.05
[0078]
从表1中明显可见,采用本专利提方法的分布式雷达系统,自校准精度明显提高。
[0079]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1