一种地图的匹配方法、装置、设备、介质及车辆与流程
本发明实施例涉及自动驾驶,具体而言,涉及一种地图的匹配方法、装置、设备、介质及车辆。
背景技术:
1、高精度地图的精度为厘米级别,相对于精度是米级别的普通地图,高精度能够提供更高精度,内容更为丰富的地图信息。为了为自动驾驶车辆提供精确的导航信息,高精度地图需随着路网的更新,或者采集车所采集的地图资料的更新而定期进行更新。
2、相关技术中,高精度地图生产的时候是以tile(一种地图的生产格式)的维度去生产的,即把一整个的地图先划分为n个方格,然后一个方格一个方格去生产。如果某个方格中有n条路,只要其中一条路发生了变化,则剩下的n-1条路也会全部重新生产。但是,在这n-1条路重新生产后,原有的基于更新前地图的匹配关系将无法被使用。并且,在地图更新后,为了满足实际导航的需求,还需重新对传统导航路径与高精度地图的匹配算法进行重新测试,并再次采用人工测评的方式对匹配失败的路段进行人工修正后,添加新的人工标注信息,然后再基于新的人工标注信息生成新的匹配关系,这一过程将会浪费大量的人力资源,效率较为低下。
技术实现思路
1、本发明实施例提供一种地图的匹配方法、装置、设备、介质及车辆,解决了由于高精度地图更新所导致原有匹配关系无法被应用,需要重新创建新的匹配关系效率低下的问题。具体技术方案如下:
2、第一方面,本发明实施例提供了一种地图的匹配方法,包括:
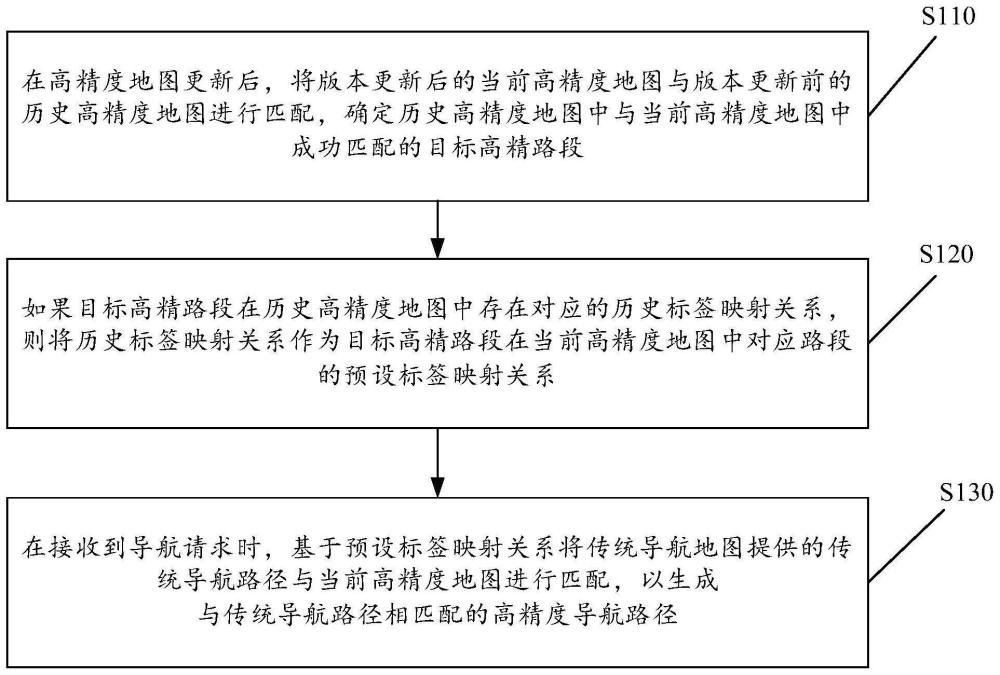
3、在高精度地图更新后,将版本更新后的当前高精度地图与版本更新前的历史高精度地图进行匹配,确定历史高精度地图中与当前高精度地图成功匹配的目标高精路段;
4、如果目标高精路段在历史高精度地图中存在对应的历史标签映射关系,则将历史标签映射关系作为目标高精路段在当前高精度地图中对应路段的预设标签映射关系,其中,历史标签映射关系是在历史高精度地图与传统导航路径的匹配测试过程中建立的匹配关系,该匹配关系用于表示传统导航路径中的轨迹点所观测到的高精路段与该高精路段对应的目标标签信息之间的关联关系;
5、在接收到导航请求时,基于预设标签映射关系将传统导航地图提供的传统导航路径与当前高精度地图进行匹配,以生成与传统导航路径相匹配的高精度导航路径。
6、通过上述方案可知,在高精度地图更新后,通过将版本更新前后的高精度地图进行匹配,可得到历史高精度地图中与当前高精度地图中成功匹配的目标高精路段。据此,在版本更新后的高精度地图中,与目标高精路段相匹配的对应路段可继承到目标高精路段在历史高精度地图中的历史标签映射关系,避免了在高精度地图更新后,人工重新标注并重新创建新版本高精度地图对应的新的标签映射关系的过程,提高了新版本高精度地图对应的标签映射关系的创建效率。
7、可选的,本实施例提供的方法还包括:
8、如目标高精路段在所述史高精度地图中存在对应的历史道路匹配关系,则将历史道路匹配关系作为目标高精路段在当前高精度地图中对应路段的预设道路匹配关系,其中,历史道路匹配关系包括在历史高精度地图与传统导航路径的匹配测试过程中建立的绝对位置匹配关系,该绝对位置匹配关系建立了传统轨迹路段中的各轨迹点的绝对位置信息与各轨迹点成功匹配的高精路段之间的关联关系;
9、相应的,基于预设标签映射关系将传统导航地图提供的传统导航路径与所述版本更新后的高精度地图进行匹配,以生成与传统导航路径相匹配的高精度导航路径,包括:
10、基于预设标签映射关系和预设道路匹配关系,将传统导航地图提供的传统导航路径与当前高精度地图进行匹配,得到与传统导航路径相匹配的高精度导航路径。
11、通过上述技术方案可知,通过绝对位置匹配关系,可直接根据传统导航路径轨迹点的标签信息和位置信息查询到与其相匹配的高精路段,避免了由于位置信息不一致而导致的匹配失败的问题
12、可选的,历史道路匹配关系还包括:在历史高精度地图与传统导航路径的匹配测试过程中建立的观测位置匹配关系,该观测位置匹配关系建立了传统轨迹路段中各轨迹点所观测到的高精路段与各轨迹点成功匹配的高精路段之间的关联关系。
13、通过上述技术方案可知,观测位置匹配关系的建立避免了在传统导航路径中发生变化的情况下,在实际匹配过程中在绝对位置匹配关系中无法查询到对应轨迹点的问题,进一步保证了匹配结果的准确率。
14、可选的,将版本更新后的当前高精度地图与版本更新前的历史高精度地图进行匹配,确定历史高精度地图中与当前高精度地图中成功匹配的目标高精路段,包括:
15、提取版本更新后的当前高精度地图中各高精路段的道路中心线,以将当前高精度地图拆分为多条高精度路径;
16、对于每一条高精度路径中的各个轨迹点,将各轨迹点与版本更新前的历史高精度地图中的高精路段进行匹配;
17、在匹配过程中,对于任意一个轨迹点,将与该轨迹点标签信息一致、位置信息一致且道路角度信息一致的高精路段作为与该轨迹点成功匹配的目标高精路段。
18、可选的,将版本更新后的当前高精度地图与版本更新前的历史高精度地图进行匹配,确定历史高精度地图中与当前高精度地图中成功匹配的目标高精路段,包括:
19、对于版本更新后的高精度地图中的每个待匹配的高精路段,基于该待匹配高精路段对应的待匹配道路范围的位置信息,在版本更新前的历史高精度地图中进行搜索,得到与待匹配道路范围的标签一致,且距离满足预设距离要求的多个候选道路范围;
20、如果候选道路范围与待匹配道路范围的重合度达到预设比例阈值,则将候选道路范围对应的候选高精路段作为该待匹配高精路段相匹配的目标高精路段。
21、通过上述技术方案可知,通过采用rtree算法,可提高道路范围的搜索效率,以快速、准确地得到与待匹配道路范围重合度达到预设比例阈值的目标道路范围。
22、可选的,基于预设标签映射关系和预设道路匹配关系,将传统导航地图提供的传统导航路径与所述当前高精度地图进行匹配,得到与传统导航路径相匹配的高精度导航路径,包括:
23、对于传统导航路径中的轨迹点所观测到的当前高精度地图中的任意一个高精路段,如果述预设标签映射关系中查询到高精路段对应的已存储标签信息,则将已存储标签信息作为高精路段对应的目标标签信息;
24、如果在预设标签映射关系中未查询到高精路段对应的已存储标签信息,则读取高精度地图中所述高精路段对应的当前标签信息,作为高精路段对应的目标标签信息;
25、对于传统导航路径中任意一条传统轨迹路段,如果在绝对道路匹配关系中查询到该传统轨迹路段中的各轨迹点所对应的当前标签信息和绝对位置信息,则将预设道路匹配关系中当前标签信息和绝对位置信息对应的高精路段作为与各轨迹点相匹配的高精路段;
26、如果在绝对道路匹配关系中未查询到该传统轨迹路段中的各轨迹点所对应的当前标签信息和绝对位置信息,则在观测位置匹配关系中查询是否存在各轨迹点所能观测到的高精路段的道路编号信息;
27、如果存在道路编号信息,则将道路编号信息对应的高精路段作为与各轨迹点相匹配的高精路段;
28、如果不存在道路编号信息,则对于传统导航路径中的任意一个待匹配轨迹点,在其所观测到的各个待匹配高精路段中,将与待匹配轨迹点的目标标签信息一致、位置信息一致且道路方向一致的待匹配高精路段作为与所述待匹配轨迹点相匹配的高精路段。
29、通过上述技术方案可知,在传统导航路径与高精度地图的实际匹配过程中,通过绝对位置匹配关系,可直接根据传统导航路径轨迹点的标签信息和位置信息查询到与其相匹配的高精路段,避免了由于位置信息不一致而导致的匹配失败的问题。此外,观测位置匹配关系的创建避免了传统导航路径发生变化后,在绝对位置匹配关系中无法查询到传统轨迹点的问题,从而可避免在传统导航地图更新后对绝对位置匹配关系的再次更新。通过观测位置匹配关系,可直接根据传统轨迹路段中各轨迹点所观测到的高精路段,确定与该各轨迹点相匹配的目标高精路段,进一步解决了由于位置信息不一致而导致的匹配失败的问题,提高了匹配结果的准确度。
30、第二方面,本发明实施例还提供了一种地图的匹配装置,包括:
31、匹配模块,被配置为在高精度地图更新后,将版本更新后的当前高精度地图与版本更新前的历史高精度地图进行匹配,确定历史高精度地图中与当前高精度地图成功匹配的目标高精路段;
32、标签映射关系继承模块,被配置为如果目标高精路段在历史高精度地图中存在对应的历史标签映射关系,则将历史标签映射关系作为目标高精路段在当前高精度地图中对应路段的预设标签映射关系,其中,历史标签映射关系是在历史高精度地图与传统导航路径的匹配测试过程中建立的匹配关系,该匹配关系用于表示传统导航路径中的轨迹点所观测到的高精路段与该高精路段对应的目标标签信息之间的关联关系;
33、高精度导航路径生成模块,被配置为在接收到导航请求时,基于预设标签映射关系将传统导航地图提供的传统导航路径与当前高精度地图进行匹配,以生成与传统导航路径相匹配的高精度导航路径。
34、可选的,本实施例提供的装置还包括:
35、历史道路匹配关继承模块,被配置为如果目标高精路段在历史高精度地图中存在对应的历史道路匹配关系,则将历史道路匹配关系作为目标高精路段在当前高精度地图中对应路段的预设道路匹配关系,其中,历史道路匹配关系包括在历史高精度地图与传统导航路径的匹配测试过程中建立的绝对位置匹配关系,该绝对位置匹配关系建立了传统轨迹路段中的各轨迹点的绝对位置信息与各轨迹点成功匹配的高精路段之间的关联关系;
36、相应的,高精度导航路径生成模块,具体被配置为:
37、基于预设标签映射关系和预设道路匹配关系,将传统导航地图提供的传统导航路径与当前高精度地图进行匹配,以生成与传统导航路径相匹配的高精度导航路径。
38、可选的,历史道路匹配关系还包括:在历史高精度地图与传统导航路径的匹配测试过程中建立的观测位置匹配关系,该观测位置匹配关系建立了传统轨迹路段中各轨迹点所观测到的高精路段与各轨迹点成功匹配的高精路段之间的关联关系。
39、可选的,匹配模块包括:
40、高精度路径拆分单元,被配置为提取版本更新后的当前高精度地图中各高精路段的道路中心线,以将当前高精度地图拆分为多条高精度路径;
41、匹配单元,被配置为对于每一条高精度路径中的各个轨迹点,将各轨迹点与版本更新前的历史高精度地图中的高精路段进行匹配;
42、目标高精路段确定单元,被配置为在匹配过程中,对于任意一个轨迹点,将与该轨迹点标签信息一致、位置信息一致且道路角度信息一致的高精路段作为与该轨迹点成功匹配的目标高精路段。
43、可选的,匹配模块包括:
44、候选道路范围确定单元,被配置为对于版本更新后的高精度地图中的每个待匹配的高精路段,基于该待匹配高精路段对应的待匹配道路范围的位置信息,在版本更新前的历史高精度地图中进行搜索,得到与待匹配道路范围的标签一致,且距离满足预设距离要求的多个候选道路范围;
45、目标高精路段确定单元,被配置为如果候选道路范围与待匹配道路范围的重合度达到预设比例阈值,则将候选道路范围对应的候选高精路段作为该待匹配高精路段相匹配的目标高精路段。
46、可选的,高精度导航路径生成模块,被配置为:
47、对于传统导航路径中的轨迹点所观测到的当前高精度地图中的任意一个高精路段,如果在预设标签映射关系中查询到高精路段对应的已存储标签信息,则将已存储标签信息作为高精路段对应的目标标签信息;
48、如果在预设标签映射关系中未查询到高精路段对应的已存储标签信息,则读取高精度地图中高精路段对应的当前标签信息,作为高精路段对应的目标标签信息;
49、对于传统导航路径中任意一条传统轨迹路段,如果在绝对道路匹配关系中查询到该传统轨迹路段中的各轨迹点所对应的当前标签信息和绝对位置信息,则将预设道路匹配关系中当前标签信息和绝对位置信息对应的高精路段作为与各轨迹点相匹配的高精路段;
50、如果在绝对道路匹配关系中未查询到该传统轨迹路段中的各轨迹点所对应的当前标签信息和绝对位置信息,则在观测位置匹配关系中查询是否存在各轨迹点所能观测到的高精路段的道路编号信息;
51、如果存在道路编号信息,则将道路编号信息对应的高精路段作为与各轨迹点相匹配的高精路段;
52、如果不存在道路编号信息,则对于传统导航路径中的任意一个待匹配轨迹点,在其所观测到的各个待匹配高精路段中,将与待匹配轨迹点的目标标签信息一致、位置信息一致且道路方向一致的待匹配高精路段作为与所述待匹配轨迹点相匹配的高精路段。
53、第三方面,本发明实施例提供了一种电子设备,该电子设备包括:
54、一个或多个处理器;
55、存储装置,用于存储一个或多个程序,
56、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明任意实施例所提供的地图的匹配方法。
57、第四方面,本发明实施例提供了一种存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如本发明任意实施例所提供的地图的匹配方法。
58、第五方面,本发明实施例提供了一种车辆,该车辆包含本发明任意实施例所提供的地图的匹配装置,或者包含本发明任意实施例所提供的电子设备。
59、第六方面,本发明实施例提供了一种计算机程序,所述计算机程序包括程序指令,该程序指令被计算机执行时实现如本发明任意实施例所提供的地图的匹配方法。
- 还没有人留言评论。精彩留言会获得点赞!