用于电缆芯体均匀探测的分析系统的制作方法
1.本发明涉及电缆领域,更具体地,涉及一种用于电缆芯体均匀探测的分析系统。
背景技术:
2.当前由于制造工艺的原因以及制造过程的随机因素的影响,容易导致制造获得的电缆产品的芯体沿着电缆产品长度方向分布不均匀,这里的不均匀主要指的是截面面积不同,也就是芯体厚度不同,如果芯体厚度分布过于不均,会对通过的电流或者信号造成干扰,影响了通过的电流或者信号的稳定性,使得后续电路分析以及信号分析缺乏可靠的基础数据,进而降低了相关电路和相关信号处理模块的工作鲁棒性。
3.cn113917298a公开了一种多路电缆芯绝缘测试方法,包括:响应于对地测试命令,控制电缆芯绝缘测试转接装置将多个被测电缆芯并联,以使绝缘电阻表对并联的多个被测电缆芯施加对地测试电压以进行对地绝缘测试;获取电缆芯绝缘测试转接装置采集的对地绝缘测试的对地测试数据;根据对地测试数据确定并联的多条被测电缆芯对地绝缘测试是否合格。
4.cn113567889a一种电缆芯线连接关系快速检测装置,该装置包括控制器,与控制器连接的显示器、左多路开关、右多路开关和数字万用表,左多路开关、右多路开关和数字万用表通过转接电缆与待检测电缆连接。
5.cn112908575a公开了一种自动抽取电缆芯并除氧化层设备,包括:机架、碾轧拧松装置、转动拧松装置、线芯进给装置、初步清除装置、二次清除装置;机架负责支撑其他各项机构且下方设置有滚轮能够自由移动;碾轧拧松装置、转动拧松装置设置于本发明前部,用于对电缆芯的外皮、内芯进行分离;线芯进给装置设置于拧松与清除装置之间;初步清除装置、二次清除装置设置于本发明后部用于对去除外皮套的线芯去除氧化层以便更好的利用。
6.cn112802632a公开了一种大截面电缆芯材加工设备,包括支撑板,支撑板上表面的一侧固定连接有第一冷却箱,支撑板上表面的另一侧固定连接有第二冷却箱,第一冷却箱内壁的两侧均套设有第一冷却管,第二冷却箱内壁的两侧均套设有第二冷却管,第一冷却管的两端均套接有连接套筒,支撑板下表面的一侧固定连接有储水箱,支撑板下表面的中部固定连接有冷水箱,支撑板下表面的另一侧固定连接有回水箱。
7.cn112768139a公开了一种高导电铝丝电缆芯的制备方法,包括以下步骤:以泡沫铝杆为原料,在泡沫铝杆的表面连续均匀镀一层铜,镀铜层的厚度为0.1 5.0μm;将镀铜泡沫铝杆于500 650℃下,在惰性气体、氢气和甲烷组成的混合气体作用下,使镀铜泡沫铝杆表面上原位生长石墨烯层,石墨烯层的厚度为0.34 1.00nm,得生长有石墨烯的泡沫铝杆;热轧,成型,得电缆芯。
8.由此可见,现有技术中未公开对沿着长度方向的电缆芯体的面积分布均匀性进行探测的技术方案。
技术实现要素:
9.为了解决上述问题,本发明提供了一种用于电缆芯体均匀探测的分析系统,通过采用激光切割模式对待鉴定的电缆沿着长度方向执行等间距的切割处理,同时采用针对性设计的图像采集模式和图像分析模式对沿着长度方向的电缆芯体的面积分布均匀性进行探测,以在过于不均时淘汰相关产品,改进生产工艺,避免影响相关电路和相关信号处理模块的运行性能。
10.根据本发明的一方面,提供了一种用于电缆芯体均匀探测的分析系统,所述系统包括:
11.激光切割器件,用于沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以按照激光切割的前后顺序在所述待鉴定电缆的剩余部分处提供垂直切割截面;
12.废料收集容器,设置在所述激光切割器件的下方,用于容置每一次激光切割动作后从所述待鉴定电缆处切除的电缆部分;
13.截面录入器件,设置在所述待鉴定电缆的对面且成像平面和与所述长度方向垂直的平面平行,用于在所述激光切割器件每完成一次激光切割动作,对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作,以获得当前时刻对应的即时截面图像;
14.芯体探测设备,与所述截面录入器件连接,用于获取所述激光切割器件各次激光切割动作分别对应的各帧即时截面图像,基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数;
15.内容辨识设备,与所述芯体探测设备连接,用于基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号;
16.其中,基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号包括:当各帧即时截面图像分别对应的各个像素点总数的标准差大于等于所述预设标准差阈值时,发出线芯分布不均信号,所述各帧即时截面图像分别对应的各个像素点总数的标准差超过所述预设标准差阈值的数值越多,线芯分布均匀等级越低;
17.其中,所述截面录入器件内置有超声探测器和光电传感器,所述超声探测器在检测到垂直切割截面到所述光电传感器等于固定距离数值时,解锁所述截面录入器件;
18.其中,所述光电传感器用于在所述截面录入器件处于解锁状态时,使能对所述待鉴定电缆的剩余部分处提供垂直切割截面执行的光电感应动作。
19.因此,本发明至少需要具备以下三处显著的技术进步:
20.第一、采用激光切割器件沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以分时获得各个垂直切割截面,从而为后续的电缆芯体的分布均匀程度检测提供硬件基础;
21.第二、采用针对性的图像分析机制基于各个垂直切割截面实现对电缆芯体的分布均匀程度的检测,具体地,通过获取各个垂直切割截面分别对应的各个芯体构成像素点总数的标准差与预设标准差的数值关系判断电缆芯体的分布均匀程度,进而判断线芯分布均
匀等级;
22.第三、在执行各个垂直切割截面的各帧图像的采集过程中,采用定制的等距设计模式以及同步工作模式保证采集数据的可靠性。
23.本发明的用于电缆芯体均匀探测的分析系统应用广泛、操控智能。由于能够采用激光切割模式对待鉴定的电缆沿着长度方向执行等间距的切割处理,同时采用针对性设计的图像采集模式和图像分析模式对沿着长度方向的电缆芯体的面积分布均匀性进行探测,从而提升了出厂的电缆产品的可靠性。
24.附图简要说明
25.本领域技术人员通过参考附图可更好理解本发明的众多优点,其中:
26.图1是依照本发明实施例1的用于电缆芯体均匀探测的分析系统的内部结构示意图。
27.图2是依照本发明实施例2的用于电缆芯体均匀探测的分析系统的内部结构示意图。
28.图3是依照本发明实施例3的用于电缆芯体均匀探测的分析系统的内部结构示意图。
具体实施方式
29.现在,将针对公开的主题对本发明进行具体的说明。
30.实施例1
31.图1是依照本发明实施例1的用于电缆芯体均匀探测的分析系统的内部结构示意图,所述系统包括:
32.激光切割器件,用于沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以按照激光切割的前后顺序在所述待鉴定电缆的剩余部分处提供垂直切割截面;
33.废料收集容器,设置在所述激光切割器件的下方,用于容置每一次激光切割动作后从所述待鉴定电缆处切除的电缆部分;
34.截面录入器件,设置在所述待鉴定电缆的对面且成像平面和与所述长度方向垂直的平面平行,用于在所述激光切割器件每完成一次激光切割动作,对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作,以获得当前时刻对应的即时截面图像;
35.芯体探测设备,与所述截面录入器件连接,用于获取所述激光切割器件各次激光切割动作分别对应的各帧即时截面图像,基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数;
36.内容辨识设备,与所述芯体探测设备连接,用于基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号;
37.其中,基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号包括:当各帧即时截面图像分别对应的各个像素点总数的标准差大于等于所述预设标准差阈值时,发出线芯
分布不均信号,所述各帧即时截面图像分别对应的各个像素点总数的标准差超过所述预设标准差阈值的数值越多,线芯分布均匀等级越低;
38.其中,所述截面录入器件内置有超声探测器和光电传感器,所述超声探测器在检测到垂直切割截面到所述光电传感器等于固定距离数值时,解锁所述截面录入器件;
39.其中,所述光电传感器用于在所述截面录入器件处于解锁状态时,使能对所述待鉴定电缆的剩余部分处提供垂直切割截面执行的光电感应动作;
40.其中,所述截面录入器件内置有超声探测器和光电传感器,所述超声探测器在检测到垂直切割截面到所述光电传感器等于固定距离数值时,解锁所述截面录入器件;
41.其中,所述截面录入器件内置有不间断电源以及信号发生器,所述不间断电源分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供不间断供电;以及所述信号发生器分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供参考时钟脉冲。
42.实施例2
43.图2是依照本发明实施例2的用于电缆芯体均匀探测的分析系统的内部结构示意图,所述系统包括:
44.激光切割器件,用于沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以按照激光切割的前后顺序在所述待鉴定电缆的剩余部分处提供垂直切割截面;
45.废料收集容器,设置在所述激光切割器件的下方,用于容置每一次激光切割动作后从所述待鉴定电缆处切除的电缆部分;
46.截面录入器件,设置在所述待鉴定电缆的对面且成像平面和与所述长度方向垂直的平面平行,用于在所述激光切割器件每完成一次激光切割动作,对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作,以获得当前时刻对应的即时截面图像;
47.芯体探测设备,与所述截面录入器件连接,用于获取所述激光切割器件各次激光切割动作分别对应的各帧即时截面图像,基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数;
48.内容辨识设备,与所述芯体探测设备连接,用于基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号;
49.其中,基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号包括:当各帧即时截面图像分别对应的各个像素点总数的标准差大于等于所述预设标准差阈值时,发出线芯分布不均信号,所述各帧即时截面图像分别对应的各个像素点总数的标准差超过所述预设标准差阈值的数值越多,线芯分布均匀等级越低;
50.器件关联机构,分别与所述截面录入器件以及所述激光切割器件连接,用于实现所述激光切割器件每完成一次激光切割动作与所述截面录入器件对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作的同步控制;
51.其中,所述截面录入器件内置有超声探测器和光电传感器,所述超声探测器在检
测到垂直切割截面到所述光电传感器等于固定距离数值时,解锁所述截面录入器件;
52.其中,所述光电传感器用于在所述截面录入器件处于解锁状态时,使能对所述待鉴定电缆的剩余部分处提供垂直切割截面执行的光电感应动作;
53.其中,实现所述激光切割器件每完成一次激光切割动作与所述截面录入器件对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作的同步控制包括:在所述激光切割器件每完成一次激光切割动作后,向所述截面录入器件发送一次录入触发命令;
54.其中,所述截面录入器件内置有不间断电源以及信号发生器,所述不间断电源分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供不间断供电;以及所述信号发生器分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供参考时钟脉冲。
55.实施例3
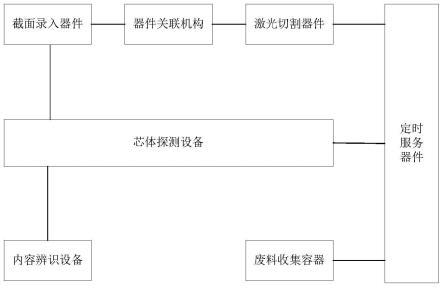
56.图3是依照本发明实施例3的用于电缆芯体均匀探测的分析系统的内部结构示意图,所述系统包括:
57.激光切割器件,用于沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以按照激光切割的前后顺序在所述待鉴定电缆的剩余部分处提供垂直切割截面;
58.废料收集容器,设置在所述激光切割器件的下方,用于容置每一次激光切割动作后从所述待鉴定电缆处切除的电缆部分;
59.截面录入器件,设置在所述待鉴定电缆的对面且成像平面和与所述长度方向垂直的平面平行,用于在所述激光切割器件每完成一次激光切割动作,对所述待鉴定电缆的剩余部分处提供垂直切割截面执行一次光电感应动作,以获得当前时刻对应的即时截面图像;
60.芯体探测设备,与所述截面录入器件连接,用于获取所述激光切割器件各次激光切割动作分别对应的各帧即时截面图像,基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数;
61.内容辨识设备,与所述芯体探测设备连接,用于基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号;
62.定时服务器件,与所述激光切割器件连接,用于在每完成设定时长的计时,向所述激光切割器件输出一次切割请求指令;
63.其中,所述激光切割器件每接收到一次切割请求执行,执行一次激光切割动作;
64.其中,基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号包括:当各帧即时截面图像分别对应的各个像素点总数的标准差大于等于所述预设标准差阈值时,发出线芯分布不均信号,所述各帧即时截面图像分别对应的各个像素点总数的标准差超过所述预设标准差阈值的数值越多,线芯分布均匀等级越低;
65.其中,所述截面录入器件内置有超声探测器和光电传感器,所述超声探测器在检测到垂直切割截面到所述光电传感器等于固定距离数值时,解锁所述截面录入器件;
66.其中,所述光电传感器用于在所述截面录入器件处于解锁状态时,使能对所述待鉴定电缆的剩余部分处提供垂直切割截面执行的光电感应动作;
67.其中,所述截面录入器件内置有不间断电源以及信号发生器,所述不间断电源分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供不间断供电;以及所述信号发生器分别与所述超声探测器和所述光电传感器连接,用于分别为所述超声探测器和所述光电传感器提供参考时钟脉冲。
68.接着,继续对本发明的用于电缆芯体均匀探测的分析系统的具体结构进行进一步的说明。
69.在根据本发明的各个实施例的用于电缆芯体均匀探测的分析系统中:
70.沿着电缆长度方向按照与所述长度方向垂直的平面对待鉴定电缆执行垂直截面的等距的激光切割动作,以按照激光切割的前后顺序在所述待鉴定电缆的剩余部分出提供垂直切割截面包括:各次激光切割位置在所述待鉴定电缆的电缆长度方向呈现等间距设置模式。
71.在根据本发明的各个实施例的用于电缆芯体均匀探测的分析系统中:
72.所述超声探测器还用于在检测到垂直切割截面到所述光电传感器不等于固定距离数值时,锁定所述截面录入器件;
73.其中,所述光电传感器还用于在所述截面录入器件处于锁定状态时,禁止对所述待鉴定电缆的剩余部分处提供垂直切割截面执行的光电感应动作。
74.在根据本发明的各个实施例的用于电缆芯体均匀探测的分析系统中:
75.基于各帧即时截面图像分别对应的各个像素点总数的标准差与预设标准差阈值的数值比对结果确定发出线芯分布不均信号或者线芯分布均匀信号还包括:当各帧即时截面图像分别对应的各个像素点总数的标准差小于所述预设标准差阈值时,发出线芯分布均匀信号。
76.在根据本发明的各个实施例的用于电缆芯体均匀探测的分析系统中:
77.基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数包括:将某一帧即时截面图像中具有的灰度数值在芯体灰度上限阈值和芯体灰度下限阈值之间的像素点作为构成所述某一帧即时截面图像中的芯体成像区域的单个像素点;
78.其中,将某一帧即时截面图像中具有的灰度数值在芯体灰度上限阈值和芯体灰度下限阈值之间的像素点作为构成所述某一帧即时截面图像中的芯体成像区域的单个像素点包括:所述芯体灰度上限阈值大于所述芯体灰度下限阈值。
79.另外,在所述用于电缆芯体均匀探测的分析系统中,基于芯体成像特征分析每一帧即时截面图像中的芯体成像区域,并获取每一帧即时截面图像中的芯体成像区域占据的像素点总数还包括:将某一帧即时截面图像中具有的灰度数值在芯体灰度上限阈值和芯体灰度下限阈值之外的像素点作为构成所述某一帧即时截面图像中的芯体成像区域之外图像区域的单个像素点。
80.虽然参照其示例性实施例特别显示和描述了本发明,但是本领域普通技术人员将明白,在不脱离权利要求定义的本发明的精神和范围的情况下,可做出各种形式和细节上的改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1