晨昏太阳同步轨道多观测平台对GEO带目标全覆盖观测方法与流程
晨昏太阳同步轨道多观测平台对geo带目标全覆盖观测方法
技术领域
1.本发明属于空间态势感知技术领域,涉及一种晨昏太阳同步轨道多观测平台对geo带目标全覆盖观测方法。
背景技术:
2.随着太空博弈加剧,空间目标数量大幅增长,截至2021年底,已编目空间目标超2万个,航天器所面临潜在威胁随之增加。据统计,卫星交会事件每周多达1600次,2022年1月,俄罗斯废弃卫星残骸与清华科学卫星发生极危险交会,推算最近距离仅14.5米。包含报废、解体航天器在内的空间碎片给空间环境安全带来极大挑战,全面掌握空间态势,获取空间碎片的轨道位置信息尤为重要。空间态势感知(space situational awareness,ssa)系统是国家全面掌握空间态势的重要途径,在空间资源愈发紧张的21世纪,正发挥着越来越重要的作用。其中,天基空间态势感知系统不受地球曲率和大气的影响,尤其对于具有极高战略价值的地球同步轨道(geosynchronous orbit,geo)空间环境的观测优势明显。传统的天基空间态势感知系统多由“专用型”监视航天器组成,建设成本高昂、用途单一。而星敏感器作为多数航天器必备的姿态传感器,可视为“兼用型”空间碎片感知传感器,从而进一步挖掘我国大量在轨航天器的剩余价值,在不必额外发射新的空间态势感知航天器的前提下,构建庞大的天基空间态势感知网。
3.据忧思科学家联盟统计,截至2019年6月20日,我国现役leo航天器179个,其中太阳同步轨道航天器132个,占比达到了74.3%。大量的太阳同步轨道航天器为基于星敏感器的空间目标泛在感知构想的实现提供了可能。由于太阳同步轨道具有进动角速度与平太阳的周年视运动相等这一特性,使得太阳同步轨道始终保持在对空间目标观测的有利位置上。相较而言,因星敏感器固定安装在卫星本体无法转动的特点,随着太阳的周年视运动,使得运行在其它轨道的航天器每年可开展观测活动的时段相对有限。例如,一个运行在400km高度、倾角45
°
近圆轨道的航天器,在j2项摄动影响下,轨道面进动角速度为-5.15
°
/天(负号表示与太阳视运动方向相反),则太阳与该轨道面的相对运动角速度将达到6.13
°
/天,即在约59天的周期内,最多将出现两个观测窗口,分别在升交点和降交点两侧,按照光度的计算结果,以12星等为极限,每个观测窗口时长约20天,若考虑地球本体遮挡,实际可观测时间会进一步减少。而太阳同步轨道进动角速度与平太阳的周年视运动相等,使得太阳同步轨道能始终有一部分保持对geo轨道的有利光学观测条件。
4.星敏感器固定在卫星本体的安装方式以及兼用性的属性,使得基于星敏感器的观测模式不能做到像sbss等专用型观测卫星一样,通过调整传感器的安装平台或卫星本体的姿态指向,以跟踪观测特定的空间目标或目标区域,而只能够被动地等待目标进入视场,以自然交会的模式开展观测。utzmannj.、徐伟分别研究了具有指向调节能力的空间目标监视平台对地球同步轨道带的两类栅格式监视策略,但并不适用于基于星敏感器自然交会模式的观测平台。针对上述技术问题,本发明提出一种天基多平台自然交会观测构型,包括由多个运行在晨昏太阳同步轨道的观测平台构成的扫描圆。扫描圆上一定数量的观测平台可以
保证对地球同步轨道带一天内的快速全覆盖。
5.由于晨昏太阳同步轨道是一类特殊的太阳同步轨道,其轨道平面位于晨昏线附近,升交点处地方时为5:00~7:00左右,因其良好的观测条件,广泛应用于气象、对地遥感等领域。本发明将晨昏太阳同步轨道观测平台对geo轨道空间碎片的观测作为研究对象,发明人发现,多个晨昏太阳同步轨道的观测平台可以随扫描圆运动和geo轨道的周期运动从而形成对geo轨道目标的依次覆盖,观测平台数量越多,其对地球同步轨道带的覆盖速度越快,重访时间越短。当平台达到一定数量时,geo轨道在24小时内的目标覆盖度将接近100%,而不再随观测平台数量的增加而增加。但由于自然观测模式的特殊性,现有参考文献对观测平台数量与全覆盖之间的数值关系的研究较少见,覆盖度不仅与观测平台轨道、扫描圆半径有关,还和星敏感器视场大小紧密相关。发明人首先研究晨昏太阳同步轨道上的平台分布,假设由若干个运行在同一轨道高度上的观测平台以等间隔分布,每个平台上星敏感器拥有一致的光轴指向,则各个星敏感器在地球同步轨道带上的扫描轨迹实现叠加。该研究有助于帮助泛在感知系统设计师更好地理解多观测平台与geo带目标覆盖度之间的关系,实现对geo带空间碎片的全覆盖,确保对geo空间态势的全面掌握。
技术实现要素:
6.本发明解决了在晨昏太阳同步轨道300km~2000km高度区间内,如何通过相同轨道高度内的多观测平台一天内实现对geo带目标全覆盖的技术问题;同时解决了在晨昏太阳同步轨道300km~2000km高度区间内,如何计算所需观测平台的最小数量以实现一天内geo带目标全覆盖的技术问题,本发明提出了一种晨昏太阳同步轨道多观测平台对geo带目标全覆盖观测方法。该方法分析了使得地球同步轨道带一天内全覆盖的观测平台数量和轨道高度、视场大小、扫描圆半径之间的模型关系。当扫描圆上的平台数量超过临界值时,对覆盖度几乎没有更大的贡献,但对重访次数的增加意义显著。多平台自然交会观测构型可以保证较高的多星敏感器同步观测比重,不同时段内目标至少被两个个星敏感器同步观测的数量占比均超过50%。
7.本发明的目的通过以下技术方案来具体实现:
8.一种晨昏太阳同步轨道多观测平台对geo带目标全覆盖观测方法,其中,星敏感器固定安装在观测平台上,该方法包括:
9.选择运行在晨昏太阳同步轨道中相同轨道高度上均匀分布且光轴指向设置为一致的多个星敏感器,多个星敏感器随着各自的观测平台运行时,均在地球同步轨道带上形成以90
°‑
i赤纬上任意点为圆心,以能够覆盖到地球同步轨道带边界为半径的扫描轨迹相同的扫描圆;
10.扫描圆上均匀分布的多个观测平台用于确保一天内地球同步轨道带目标被全覆盖;
11.其中,i为观测平台所在晨昏太阳同步轨道轨道倾角。
12.进一步的,相邻星敏感器所在的观测平台的距离差小于等于距离阈值。观测平台为等间隔分布或近似等间隔分布。
13.进一步的,所述星敏感器的光轴指向包括仰角和方位角;
14.在观测平台轨道坐标系osx
oyozo
中,星敏感器的光轴l
obs
与观测平台轨道子坐标系zoosyo
平面的夹角为方位角az,在观测平台轨道子坐标系zoo
syo
平面的投影与yo轴负方向的夹角为仰角e
l
,靠近zo轴正向为负,反之为正。
15.进一步的,当扫描圆上观测平台数量为偶数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0016][0017]
其中,为当扫描圆上观测平台数量为偶数时,确保一天内地球同步轨道带目标被全覆盖最少的观测平台数量;n
′
表示在地球同步轨道带目标由西向东运行过程中,扫描圆上转过的观测平台个数;ω
t
为地球同步轨道带目标角速度;rs为扫描圆的半径;ωs为观测平台角速度;观测平台的星敏感器视场大小为n
×
n,n是以角度为单位的任意数值,不同星敏感器的视场大小不一,由光学系统设计决定。
[0018]
进一步的,当扫描圆上观测平台数量为奇数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0019][0020]
其中,为当扫描圆上观测平台数量为奇数时,确保一天内地球同步轨道带目标被全覆盖的最少观测平台数量;n
′
表示在地球同步轨道带目标由西向东运行过程中,扫描圆上转过的观测平台个数;ω
t
为地球同步轨道带目标角速度;rs为扫描圆的半径;ωs为观测平台角速度;观测平台的星敏感器视场大小为n
×
n,n是以角度为单位的任意数值,不同星敏感器的视场大小不一,由光学系统设计决定。
[0021]
进一步的,星敏感器光轴指向中的仰角e
l
和方位角az均不为0
°
时,由仰角e
l
和方位角az计算的扫描圆的半径rs为:
[0022][0023]
其中,为星敏感器光轴指向中的仰角e
l
和方位角az均不为0
°
时,由仰角e
l
和方位角az计算的扫描圆的半径;表示地球同步轨道带上e2点到d2点的距离;其中,d2为天球坐标系中x轴与天赤道的交点,e2为星敏感器光轴在xoey平面上的投影与天赤道的交点;oe为地球质心;r
s1
为星敏感器光轴指向中的方位角az=0
°
时,由仰角e
l
计算的扫描圆的半径;αs为观测平台轨道长半轴;α
t
为地球同步轨道带长半轴。
[0024]
进一步的,星敏感器光轴指向中的方位角az=0
°
时,由仰角e
l
计算的扫描圆的半径r
s1
为:
[0025][0026]
其中,∠a1oec1为星敏感器光轴指向中的方位角az=0
°
时,由仰角e
l
计算的扫描圆的半径;αs为观测平台轨道长半轴;α
t
为地球同步轨道带长半轴;∠a1oeb1表示以地球质心oe为顶点,a1oe与oeb1的夹角,a1为星敏感器光轴与地球同步轨道带的交点,b1为o
syo
反向延长线与地球同步轨道带的交点。
[0027]
进一步的,星敏感器光轴指向中的仰角e
l
=0
°
时,由方位角az计算的扫描圆的半径r
s2
为:
[0028][0029]
其中,为星敏感器光轴指向中的仰角e
l
=0
°
时,由方位角az计算的扫描圆的半径;表示地球同步轨道带上e2点到d2点的距离;表示地球同步轨道带上e2点到c2点的距离;d2为天球坐标系中x轴与天赤道的交点;e2为星敏感器光轴在xoey平面上的投影与天赤道的交点;oe为地球质心;c2为仰角e
l
=0
°
时,星敏感器光轴指向与地球同步轨道带的交点;α
t
为地球同步轨道带长半轴;αs为观测平台轨道长半轴。
[0030]
其中,晨昏太阳同步轨道在300km~2000km高度区间内,轨道倾角i的变化范围在96.67
°
~104.89
°
之间,地球同步轨道带扫描圆圆心赤纬的值在-14.89
°
~-6.67
°
之间;地球同步轨道带,为以地球中心为球心,轨道高度36000km,赤纬由-15
°
到+15
°
所涵盖的球面环状切面。
[0031]
进一步的,星敏感器在地球同步轨道带球面环状切面扫过的轨迹呈螺旋状。
[0032]
其中,最佳所述仰角为星敏感器对地球同步轨道带的全覆盖时长最短的临界值的仰角;最佳所述方位角为星敏感器对地球同步轨道带的全覆盖时长最短的临界值的方位角。
[0033]
所述晨昏太阳同步轨道是太阳同步轨道位于地球晨昏线上的轨道,所述太阳同步轨道是航天器在受摄情况下,轨道面的进动角速度与平太阳的周年视运动速度相等的轨道。
[0034]
优选的,在2
°×2°
视场中,当晨昏太阳同步轨道的均匀分布平台数量5时,对地球同步轨道带一天内覆盖度为99.9%,近似满足全覆盖要求。
[0035]
本发明的有益效果是:
[0036]
本发明针对多个低轨太阳同步轨道航天器观测平台对高轨geo轨道空间碎片的观测场景,利用300km~2000km轨道高度区间内的太阳同步轨道航天器作为观测平台,在自然交会观测模式下,选择运行在晨昏太阳同步轨道中相同轨道高度上均匀分布且光轴指向设置为一致的多个星敏感器,多个星敏感器随着各自的观测平台运行时,均在地球同步轨道
带上形成以90
°‑
i赤纬上任意点为圆心,以能够覆盖到地球同步轨道带边界为半径的扫描轨迹相同的扫描圆;
[0037]
扫描圆上均匀分布的多个观测平台用于确保一天内地球同步轨道带目标被全覆盖。
[0038]
观测平台数量越多,其对地球同步轨道带的覆盖速度越快,重访时间越短。本发明给出了确保一天内地球同步轨道带目标被全覆盖的观测平台最少数量的计算方法,在满足星敏感器观测条件的前提下,能够保证对geo带全覆盖,不丢失空间碎片目标,同时结合星敏感器视场大小,尽可能在降低观测平台数量前提下,发挥观测效益。本发明还进一步分析了晨昏太阳同步轨道观测平台数量对观测效益的详细影响,为后续分布式多轨道多观测平台的泛在感知观测构型设计奠定了理论基础。
[0039]
本发明是基于星敏感器的空间碎片泛在感知观测构型设计的基础性工作,有针对性地选择运行在哪些轨道上的航天器作为观测平台,为太阳同步轨道航天器观测平台的选择提供了理论依据,可根据此观测模型,在不影响星敏感器对恒星成像的前提下调整多个星敏感器的安装指向,从而建立了基于自然交会模式的扫描圆观测方式,为多个低轨太阳同步轨道航天器对高轨(geo轨道)目标(空间碎片)的观测提供了新观测模式。依据此模式,使星敏感器在完成其固有定姿任务的同时,从所拍摄的星图中检测并提取空间碎片测量信息,显著提升星敏感器对空间碎片的泛在感知效能,以实现空间碎片的泛在感知。
附图说明
[0040]
下面根据附图和实施例对本发明作进一步详细说明。
[0041]
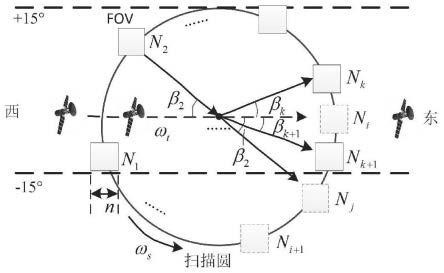
图1是目标与扫描圆的相对运动关系示意图。
[0042]
图2是太阳同步轨道轨道高度和轨道倾角关系示意图。
[0043]
图3是星敏感器光轴指向定义示意图。
[0044]
图4是仰角与方位角共同作用的扫描圆几何关系示意图。
[0045]
图5是仅仰角对应的扫描圆几何关系示意图。
[0046]
图6是仅方位角对应的扫描圆几何关系示意图。
[0047]
图7是仰角扫描圆示意图。
[0048]
图8是方位角扫描圆示意图。
[0049]
图9是星敏感器与地球同步轨道带的相对运动轨迹示意图。
[0050]
图10是不同数量观测平台全覆盖时长示意图。
[0051]
图11是观测平台为6时,对地球同步轨道带目标的重访次数示意图。
[0052]
图12是观测平台为10时,对地球同步轨道带目标的重访次数示意图。
[0053]
图13是5个观测平台空间构型正视图。
[0054]
图14是5个观测平台空间构型侧视图。
具体实施方式
[0055]
实施例一
[0056]
本发明实施例一提供了一种晨昏太阳同步轨道多观测平台对geo带目标全覆盖的观测方法,其中,星敏感器固定安装在观测平台上,该方法包括:
[0057]
选择运行在晨昏太阳同步轨道中相同轨道高度上均匀分布且光轴指向设置为一致的多个星敏感器,多个星敏感器随着各自的观测平台运行时,均在地球同步轨道带上形成以90
°‑
i赤纬上任意点为圆心,以能够覆盖到地球同步轨道带边界为半径的扫描轨迹相同的扫描圆;
[0058]
扫描圆上均匀分布的多个观测平台用于确保一天内地球同步轨道带目标被全覆盖;
[0059]
其中,i为观测平台所在晨昏太阳同步轨道轨道倾角。
[0060]
本发明的技术方案,对于相同的观测平台数量,均匀分布的观测平台可以使整个扫描圆对空间碎片的观测是均匀的,不均匀的分布可能导致某两个观测平台间空隙较大,漏掉某些碎片。
[0061]
其中,本方案中,相邻星敏感器所在的观测平台的距离差小于等于距离阈值,因此,均匀分布的多个观测平台为等间隔分布或近似等间隔分布均可进行技术方案的实施。
[0062]
工程中,观测平台的轨道根据自身任务要求而确定,不可能完全一致,但常见的轨道高度范围内,太阳同步轨道的轨道倾角变化很小,即扫描圆的圆心不会有太大的变化。至于相位差,均匀的相位分布可以尽可能减少平台间的观测间隙,由于我国低轨卫星中有74.3%运行在太阳同步轨道,我们可以从密集的航天器分布中挑选相位尽可能等间隔分布的航天器作为观测平台,再结合实际分布情况具体计算。
[0063]
进一步的,当扫描圆上观测平台数量为偶数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0064][0065]
其中,为当扫描圆上观测平台数量为偶数时,确保一天内地球同步轨道带目标被全覆盖最少的观测平台数量;n
′
表示在地球同步轨道带目标由西向东运行过程中,扫描圆上转过的观测平台个数;ω
t
为地球同步轨道带目标角速度;rs为扫描圆的半径;ωs为观测平台角速度;观测平台的星敏感器视场大小为n
×
n,n是以角度为单位的任意数值,不同星敏感器的视场大小不一,由光学系统设计决定。
[0066]
进一步的,当扫描圆上观测平台数量为奇数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0067][0068]
其中,为当扫描圆上观测平台数量为奇数时,确保一天内地球同步轨道带目标被全覆盖的最少观测平台数量;n
′
表示在地球同步轨道带目标由西向东运行过程中,扫描圆上转过的观测平台个数;ω
t
为地球同步轨道带目标角速度;rs为扫描圆的半径;ωs为观测平台角速度;观测平台的星敏感器视场大小为n
×
n,n是以角度为单位的任意数值,不同星敏感器的视场大小不一,由光学系统设计决定。
[0069]
分析如下:
[0070]
如图1所示,星敏感器视场大小为n
×
n,观测平台角速度为ωs,地球同步轨道目标角速度为ω
t
,星敏感器指向仰角为e
l
,方位角为az,扫描圆半径为rs(角距)。做以下分析:地
球同步轨道目标自西向东一天内两次穿过扫描圆,如图1中间虚线所示,临界情况是,目标在图1中第一视场n1经过后的下一时刻且在第二视场n2还未抵达的间隙进入扫描圆,此时第二视场n2距目标的第二角距为β2。当观测平台数量为偶数时,存在与此刻第二视场n2对称的第三视场nj,当目标运行至圆的东侧边界时,对应第四视场nk和第五视场n
k+1
,第四角距βk、第五角距β
k+1
为第四视场和第五视场的角距。为保证目标被全覆盖,存在如下关系:
[0071]
在扫描圆的西侧,第二角距β2可表示为:
[0072][0073]
目标由西至东,从进入扫描圆起至即将进入东侧扫描视场为止,该运行过程满足如下关系:
[0074][0075]
其中,n
′
表示在目标由西向东运行过程中,扫描圆上转过的视场个数。在扫描圆东侧,有如下关系:
[0076][0077]
其中,不等式约束了目标进入第五视场n
k+1
需满足的第五角距β
k+1
的上界。综合上式,可确定当扫描圆上观测平台数量为偶数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0078][0079]n′
表示在目标由西向东运行过程中,扫描圆上转过的视场个数;视场大小为n
×
n,观测平台角速度为ωs,地球同步轨道目标角速度为ω
t
,星敏感器指向仰角为e
l
,方位角为az,扫描圆半径为rs。
[0080]
当观测平台数量为奇数时,与第二视场n2对称的是第六视场ni与第七视场n
i+1
的中点位置,则目标由西至东,从进入扫描圆起至即将进入东侧扫描视场为止,该运行过程满足如下关系:
[0081][0082]
与之对应的,观测平台数量为奇数时,确保一天内地球同步轨道带目标被全覆盖的观测平台数量最少为:
[0083][0084]
其中,所述扫描圆的圆心为在地球同步带上-14.89
°
~-6.67
°
赤纬上的任意点,在
轨道面确定的情况下,扫描圆半径为星敏感器光轴指向的函数。
[0085]
其中,运行在晨昏太阳同步轨道的天基观测平台具有良好的光照条件和观测时长,是观测平台进行空间碎片观测的首选轨道类型;本实施例中,所述观测平台为运行在晨昏太阳同步轨道的天基观测平台。其中,所述晨昏太阳同步轨道是太阳同步轨道位于地球晨昏线上的轨道,所述太阳同步轨道是航天器在受摄情况下,轨道面的进动角速度与平太阳的周年视运动速度相等的轨道。所述地球同步轨道带,为以地球中心为球心,轨道高度36000km,赤纬由-15
°
到+15
°
所涵盖的球面环状切面。
[0086]
平太阳的周年视运动周期为365.242平太阳日,当仅考虑地球非球形j2项摄动时,轨道倾角、偏心率和轨道长半轴满足如下关系:
[0087][0088]
其中,re为地球平均半径;e为航天器轨道偏心率;i为航天器轨道倾角;α为航天器轨道半长轴。j2表示地球非球形的第二阶摄动,是专属表达方式。
[0089]
若观测平台为近圆轨道,则轨道倾角与轨道高度的关系如图2所示。在太阳同步轨道300km~2000km高度区间内,高度和轨道倾角的关系近似为线性,轨道倾角的变化范围较窄,为96.67
°
~104.89
°
之间,太阳同步轨道面在天球上投影的圆心位于南天区,即赤纬的值为90
°‑
i,在-14.89
°
~-6.67
°
之间。固定安装的星敏感器随着观测平台在轨道上的运行,将在地球同步带上形成以-14.89
°
~-6.67
°
赤纬上某一点为圆心,半径为rs的扫描圆。
[0090]
所述扫描圆半径,用于决定扫描圆是否能够覆盖到地球同步轨道带的边界。
[0091]
如图3所示,所述星敏感器光轴指向包括仰角和方位角;
[0092]
在观测平台轨道坐标系osx
oyozo
中,星敏感器的光轴l
obs
与观测平台轨道子坐标系zoo
syo
平面的夹角为方位角az,在观测平台轨道子坐标系zoo
syo
平面的投影与yo轴负方向的夹角为仰角e
l
,靠近zo轴正向为负,反之为正。
[0093]
如图4所示,对应于图5中的在球面三角形和中,仰角e
l
和方位角az均不为0
°
时,由仰角e
l
和方位角az计算的扫描圆半径rs为:
[0094][0095]
其中,为仰角e
l
和方位角az均不为0
°
时,由仰角e
l
和方位角az计算的扫描圆半径;为光轴指向;为地球同步轨道带上e2点到d2点的距离;其中,d2为天球坐标系中x轴与天赤道的交点,e2为星敏感器光轴在xoey平面上的投影与天赤道的交点;oe为地球质心;r
s1
为方位角az=0
°
时,由仰角e
l
计算的扫描圆半径;αs为观测平台轨道长半轴;α
t
为地球同步轨道带长半轴。
[0096]
如图5所示,方位角az=0
°
时,由仰角e
l
计算的扫描圆半径r
s1
为:
[0097]
则在δa1osoe中,易得:
[0098][0099]
同理,在δb1osoe中,有:
[0100][0101]
联合上式,得半径r
s1
为:
[0102][0103]
其中,∠a1oec1为方位角az=0
°
时,由仰角e
l
计算的扫描圆半径;αs为观测平台轨道长半轴;α
t
为地球同步轨道带长半轴;∠a1oeb1表示以地球质心oe为顶点,a1oe与oeb1的夹角,a1为星敏感器光轴与地球同步轨道带的交点;b1为o
syo
反向延长线与地球同步轨道带的交点;oe为地球质心,os为观测平台质心;为地球同步轨道带;osa1为星敏感器光轴指向。
[0104]
如图6所示,osc2为星敏感器光轴指向,zoo
syo
为轨道坐标系中的平面,为扫描圆半径,则在球面三角形δc2e2d2中;仰角e
l
=0
°
时,由方位角az计算的扫描圆半径r
s2
为:
[0105][0106]
其中,为扫描圆半径;表示地球同步轨道带上e2点到d2点的距离;表示地球同步轨道带上e2点到c2点的距离;d2为天球坐标系中x轴与天赤道的交点;e2为星敏感器光轴在xoey平面上的投影与天赤道的交点;c2为e
l
=0
°
时,星敏感器光轴指向与地球同步轨道带的交点;α
t
为地球同步轨道带长半轴;αs为观测平台轨道长半轴。
[0107]
仰角与方位角共同影响扫描圆的半径,但仰角的影响更显著。以轨道高度700km的太阳同步轨道为例,如图7-图8所示,图中显示了不同仰角及不同方位角扫描圆在天球上的投影,圆心在赤纬-8.2
°
上,在已知扫描圆半径的情况下,可由方位角az=0
°
时,由仰角e
l
计算的扫描圆半径r
s1
及仰角e
l
=0
°
时,由方位角az计算的扫描圆半径r
s2
计算能够覆盖天球北纬15
°
范围的最小仰角为13.8
°
,最小方位角为21.2
°
,对应图中最外环点划线所示扫描圆。
[0108]
其中,地球同步轨道带,为以地球中心为球心,轨道高度36000km,赤纬由-15
°
到+15
°
所涵盖的球面环状切面。
[0109]
实际中,如图9所示,由于地球同步轨道带自身存在与观测轨道平面之间的相对运动,星敏感器在地球同步轨道带平面扫过的轨迹呈螺旋状。星敏感器视场对geo带的覆盖是通过螺旋状的相对运动关系实现的,可以通过合理的设计观测平台轨道高度、星敏感器安装指向,尽可能使得多圈次的螺旋状扫描彼此不重复叠加,从而在较短的时间内实现对geo带空间碎片的快速全覆盖。
[0110]
以往天基感知系统多采用随动跟踪的观测模式,即通过二维转台控制传感器“跟着”目标观测,观测弧段长,效能高;但星敏感器作为“兼用型”传感器,不存在随动跟踪的可能,而是仅能以自然交会的方式对geo带进行普扫。此时,挑选哪些轨道的平台作为观测平台,并如何在不影响星敏感器正常工作的情况下,通过调整安装指向,来获得良好的观测效能至关重要。通过本方案设计的扫描圆观测模型,可充分利用良好的光照观测条件,随geo带的运动而形成螺旋状的观测形式,建立了星敏感器安装指向、观测平台轨道高度与观测覆盖百分比之间的对应关系。
[0111]
以上模型确定了使地球同步轨道带在一天内实现全覆盖的扫描圆上观测平台的最小个数。上述公式提供了可供参考的理论值,建模过程基于一定假设,即各观测平台轨道高度是一致的,且拥有相同的相位差,工程中,观测平台的轨道根据自身任务要求而确定,不可能完全一致,但常见的轨道高度范围内,太阳同步轨道的轨道倾角变化很小,即扫描圆的圆心不会有太大的变化。至于相位差,均匀的相位分布可以尽可能减少平台间的观测间隙,由于我国低轨卫星中有74.3%运行在太阳同步轨道,我们可以从密集的航天器分布中挑选相位尽可能等间隔分布的航天器作为观测平台,再结合实际分布情况具体计算。
[0112]
多观测平台效能分析:
[0113]
做以下验证:假设观测视场大小为2
°×2°
,平台轨道高度700km,则通过计算的扫描圆半径rs、r
s1
和r
s2
得到最佳的扫描圆半径和星敏感器视场指向。同时,ωs=0.063rad/min,ω
t
=4.375
×
10-3
rad/min,可计算得到使地球同步轨道带在一天内实现全覆盖的扫描圆上观测平台的最小个数通过stk仿真做进一步验证可得,时,地球同步轨道带24h覆盖度为97.8%;时,地球同步轨道带24h覆盖度为99.9%,如图10所示。同时可以注意到,当平台数量进一步增加时,对覆盖的速度或覆盖百分比几乎没有更多的贡献。5个观测平台空间构型如图13-图14所示。
[0114]
但更多的平台数量对目标重访次数的提高作用显著。计算不同数量的观测平台在一天内对地球同步轨道带上不同位置目标的重访次数,由图11和图12可以看到,当观测平台由6个增加到10个时,北纬15
°
带上的目标一天内的重访次数由6~7次增加至11次左右,其它纬度带上的目标的重访次数也都普遍增加。图11中,由于观测平台数量少,不同经纬度上目标的重访次数差异明显,体现在图11的波动显著,不如图12平滑。同时还注意到,目标的重访次数在纬度带上呈现出由北至南降低的梯度趋势,这是由扫描圆和地球同步轨道带相对速度的差异造成的,在地球同步轨道带的北侧时,目标的运动速度和扫描圆的切线速度相反,目标在视场内停留时间短,重访次数高;随着扫描圆运动,在中低纬度带附近,目标的运动速度方向逐渐和扫描圆的切线速度垂直,在视场内的停留时间增加,单位时间内的重访次数降低。
[0115]
本发明实施例针对多个低轨太阳同步轨道航天器观测平台对高轨geo轨道空间碎片的观测场景,利用300km~2000km轨道高度区间内的太阳同步轨道航天器作为观测平台,
在自然交会观测模式下,选择运行在晨昏太阳同步轨道中相同轨道高度上均匀分布且光轴指向设置为一致的多个星敏感器,多个星敏感器随着各自的观测平台运行时,均在地球同步轨道带上形成以90
°‑
i赤纬上任意点为圆心,以能够覆盖到地球同步轨道带边界为半径的扫描轨迹相同的扫描圆;
[0116]
扫描圆上均匀分布的多个观测平台用于确保一天内地球同步轨道带目标被全覆盖。
[0117]
观测平台数量越多,其对地球同步轨道带的覆盖速度越快,重访时间越短。本发明给出了确保一天内地球同步轨道带目标被全覆盖的观测平台最少数量的计算方法,在满足星敏感器观测条件的前提下,能够保证对geo带全覆盖,不丢失空间碎片目标,同时结合星敏感器视场大小,尽可能在降低观测平台数量前提下,发挥观测效益。本发明还进一步分析了晨昏太阳同步轨道观测平台数量对观测效益的详细影响,为后续分布式多轨道多观测平台的泛在感知观测构型设计奠定了理论基础。
[0118]
本发明是基于星敏感器的空间碎片泛在感知观测构型设计的基础性工作,有针对性地选择运行在哪些轨道上的航天器作为观测平台,为太阳同步轨道航天器观测平台的选择提供了理论依据,可根据此观测模型,在不影响星敏感器对恒星成像的前提下调整多个星敏感器的安装指向,从而建立了基于自然交会模式的扫描圆观测方式,为多个低轨太阳同步轨道航天器对高轨(geo轨道)目标(空间碎片)的观测提供了新观测模式。依据此模式,使星敏感器在完成其固有定姿任务的同时,从所拍摄的星图中检测并提取空间碎片测量信息,显著提升星敏感器对空间碎片的泛在感知效能,以实现空间碎片的泛在感知。
[0119]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1