一种宽波束脉冲雷达海上多径信号估计方法与流程
1.本发明属于雷达领域,特别涉及该领域中的一种宽波束脉冲雷达海上多径信号估计方法。
背景技术:
2.对海雷达通常工作在小擦地角或是低仰角模式,在进行海面低慢小目标检测、跟踪和识别时,时常会受到多径信号的影响,尤其对于宽波束雷达。这是因为当雷达波束较宽时,目标的直达波和海面反射的信号都位于波束主瓣之内,而且小擦地角或低仰角的工作特点决定了海面有时可以看成是光滑的镜面,从而导致海面反射的多径信号能量变得不可忽略。因此,要提高对海雷达检测能力,需要对多径信号进行估计。
3.然而,在海面背景下准确估计多径信号并非易事。多径传播理论模型虽然可以给出多径信号的预测结果,但离实际应用仍存在一定差距。主要存在三方面的问题,一是实时变化的海面使得多径传播的路径并不稳定,影响了海面反射信号的稳定性;二是海浪运动导致船只晃动,影响了多径信号接收天线的姿态;三是船只在固定位置上的测量数据难以估计出多径信号的幅度,而且在海上也很难保持船只稳定。因此,单纯依靠理论模型预测的方式不足以准确估计多径信号,还需要找寻新的方法。
技术实现要素:
4.本发明所要解决的技术问题就是提供一种宽波束脉冲雷达海上多径信号估计方法,用于解决架设在海岛山顶处的海杂波观测雷达在进行目标检测时面临的多径问题。
5.本发明采用如下技术方案:
6.一种宽波束脉冲雷达海上多径信号估计方法,其改进之处在于,包括如下步骤:
7.步骤1,有效距离计算:
8.根据雷达发射功率p
t
、雷达天线增益g
t
、雷达波长λ,雷达系统损耗lr、电磁信号接收机动态范围[s
emrmin
,s
emrmax
]、电磁信号接收机天线增益g
emr
、线缆损耗l
emr
,计算理论上用于接收雷达信号的距离范围[r
thmin
,r
thmax
]:
[0009][0010][0011]
步骤2,航线设计:
[0012]
根据雷达脉宽τ,光速c,雷达海拔高度hr,地形限制下雷达最大可观测俯仰角θ0,雷达下俯角α0,雷达天线方向图因子gr,电磁信号接收机可测距离r,结合步骤1计算的距离范围,设计雷达波束方位中心方向的海上航线ab,航线两端对应的实际距离范围[r
acmin
,r
acmax
]为:
[0013][0014][0015]
根据最小二乘法求解上式4,得到电磁信号接收机最大可测距离r
max
,进而得到r
acmax
:
[0016]racmax
=min{r
thmax
,r
max
}
ꢀꢀꢀꢀꢀꢀ
(5)
[0017]
步骤3,信号接收:
[0018]
根据雷达经纬度(latr,lonr),雷达海拔高度hr,方位角φ0,实际距离范围[r
acmin
,r
acmax
],利用vincenty正解公式计算航线端点ab的经纬度,再通过gps引导船只沿设计航线匀速运动,获取多径信号随时间t变化的功率数据p
mp
(t),同时通过姿态仪记录船只实时姿态a(α,β,γ,t),其中α为俯仰角,β为横滚角,γ为偏航角;
[0019]
步骤4,天线方向图因子修正:
[0020]
根据雷达海拔高度hr、电磁信号接收机天线高度h
emr
,船只经纬度(lats(t),lons(t)),雷达经纬度(latr,lonr),利用vincenty反解公式计算船只与雷达天线波束中心的夹角,用俯仰角和方位角表示为根据姿态仪数据a(α,β,γ,t)和下式6计算雷达与电磁信号接收机天线波束中心的夹角,用俯仰角和方位角表示为得到天线方向图因子修正后的多径信号功率p
mpac
;
[0021][0022][0023]
其中,为电磁信号接收机天线方向图因子,为雷达天线方向图因子;
[0024]
步骤5,多径信号估计:
[0025]
根据雷达海拔高度hr、电磁信号接收机天线高度h
emr
,船只经纬度(lats(t),lons(t)),雷达经纬度(latr,lonr),利用vincenty反解公式计算电磁信号接收机天线到雷达的距离r(t),再结合菲涅尔反射系数γ、有效浪高hs,雷达波长λ,利用下式8计算理论估计多径信号功率p
mpth
(t),结合实测数据建立方程组p
mpth
(t)=p
mpac
(t),利用粒子群算法优化参数,估计出多径信号随时间的最佳预测曲线p
opt
(t);
[0026][0027]
其中,
ψ为γe的相位,
[0028][0029]
其中,γ
ec
为优化后的参数。
[0030]
本发明的有益效果是:
[0031]
本发明所公开的方法,适用于架设在沿海的海用雷达,可以提高雷达的目标检测精度。
附图说明
[0032]
图1是本发明方法的流程示意图;
[0033]
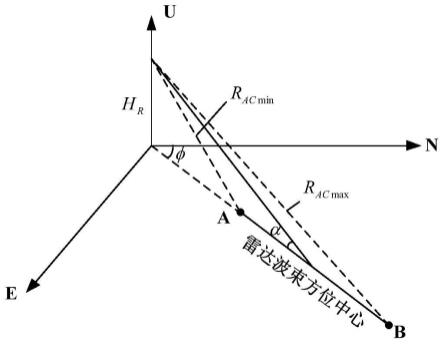
图2是设计航线的几何示意图;
[0034]
图3是多径信号的估计结果。
具体实施方式
[0035]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0036]
实施例1,本实施例公开了一种宽波束脉冲雷达海上多径信号估计方法,如图1所示,包括如下步骤:
[0037]
步骤1,有效距离计算:
[0038]
根据雷达发射功率p
t
、雷达天线增益g
t
、雷达波长λ,雷达系统损耗lr、电磁信号接收机动态范围[s
emrmin
,s
emrmax
]、电磁信号接收机天线增益g
emr
、线缆损耗l
emr
,计算理论上用于接收雷达信号的距离范围[r
thmin
,r
thmax
]:
[0039][0040][0041]
步骤2,航线设计:
[0042]
如图2所示,根据雷达脉宽τ,光速c,雷达海拔高度hr,地形限制下雷达最大可观测俯仰角θ0,雷达下俯角α0,雷达天线方向图因子gr,电磁信号接收机可测距离r,结合步骤1计算的距离范围,明确可用于多径信号测量的实际距离范围,设计雷达波束方位中心方向的海上航线ab,航线两端对应的实际距离范围[r
acmin
,r
acmax
]为:
[0043]
[0044][0045]
根据最小二乘法求解上式4,得到电磁信号接收机最大可测距离r
max
,进而得到r
acmax
:
[0046]racmax
=min{r
thmax
,r
max
}
ꢀꢀꢀꢀꢀꢀ
(5)
[0047]
步骤3,信号接收:
[0048]
根据雷达经纬度(latr,lonr),雷达海拔高度hr,方位角φ0,实际距离范围[r
acmin
,r
acmax
],利用vincenty正解公式计算航线端点ab的经纬度,再通过gps引导船只沿设计航线匀速运动,船只搭载电磁信号接收系统,获取雷达多径信号随时间t变化的功率数据p
mp
(t),同时通过姿态仪记录船只实时姿态a(α,β,γ,t),其中α为俯仰角,β为横滚角,γ为偏航角;
[0049]
步骤4,天线方向图因子修正:
[0050]
根据雷达海拔高度hr、电磁信号接收机天线高度h
emr
,船只经纬度(lats(t),lons(t)),雷达经纬度(latr,lonr),利用vincenty反解公式计算船只与雷达天线波束中心的夹角,用俯仰角和方位角表示为根据姿态仪数据a(α,β,γ,t)和下式6计算雷达与电磁信号接收机天线波束中心的夹角,用俯仰角和方位角表示为得到天线方向图因子修正后的多径信号功率p
mpac
;
[0051][0052][0053]
其中,为电磁信号接收机天线方向图因子,为雷达天线方向图因子;
[0054]
步骤5,多径信号估计:
[0055]
根据雷达海拔高度hr、电磁信号接收机天线高度h
emr
,船只经纬度(lats(t),lons(t)),雷达经纬度(latr,lonr),利用vincenty反解公式计算电磁信号接收机天线到雷达的距离r(t),再结合菲涅尔反射系数γ、有效浪高hs,雷达波长λ,利用下式8计算理论估计多径信号功率p
mpth
(t),结合实测数据建立方程组p
mpth
(t)=p
mpac
(t),利用粒子群算法优化参数,估计出多径信号随时间的最佳预测曲线p
opt
(t);
[0056][0057]
其中,其中,ψ为γe的相位,
[0058]
[0059]
其中,γ
ec
为优化后的参数。
[0060]
多径信号的估计结果如图3所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1