一种锂电池短路检测设备的制作方法
1.本发明涉及锂电池生产技术领域,特别涉及一种锂电池短路检测设备。
背景技术:
2.锂电池是一种二次电池,主要依靠锂离子在正极和负极之间移动来工作,而在锂电池的工作过程中会出现短路的故障,短路故障难以检测和分析,一旦发生短路会产生高温、高阻,甚至造成电池组的连锁反应,因此需要在锂电池加工完成后进行短路检测,避免隐患。目前市面上的短路检测装置种类繁多,但仍存在效率低下、仍需人工参与等缺点,无法大批量进行检测。
技术实现要素:
3.本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种锂电池短路检测设备,提高检测效率。
4.根据本发明的实施例,提供一种锂电池短路检测设备,包括机台、上料位、检测装置和下料位,机台设有可活动的转换工位,转换工位上设有若干个用于装设电池的治具。上料位设有用于固定料盘的固定装置和机械手,固定装置位于转换工位的一侧,机械手把若干个电池从料盘搬运至治具中。检测装置位于转换工位的一侧并滑动连接于机台,检测装置设有若干个用于检测的检测头。下料位处于转换工位与检测装置相对的另一侧,下料位设有机械手和固定装置,机械手把检测后的电池从治具搬运至下料位中。
5.本发明所述的一种锂电池短路检测设备至少具有以下有益效果:本实施例设置有机台、上料位、检测装置和下料位,机台设有转换工位,转换工位上具有治具,治具用于装设电池工件;上料位设有用于固定料盘的固定装置和机械手,固定装置位于转换工位的一侧,机械手把若干个电池从料盘搬运至治具中,一次装夹多个电池,利于提高效率。检测装置设有若干个用于检测的检测头,每个检测头对应一个电池,利于大批量检测。下料位设有机械手和固定装置,当电池完成检测后,机械手把电池从治具搬运至下料位中,完成下料工序,整个上下料及检测的构成均自动完成,无需人工介入操作,批量检测,提高效率。
6.根据本发明所述的一种锂电池短路检测设备,机台上设有用于运输料盘的输送通道,上料位和下料位分别位于输送通道的上下游处。
7.根据本发明所述的一种锂电池短路检测设备,固定装置设有承载料盘的支撑板和位于料盘两侧的牵引机构。
8.根据本发明所述的一种锂电池短路检测设备,料盘两侧具有外沿,牵引机构扣接并牵引外沿。
9.根据本发明所述的一种锂电池短路检测设备,转换工位至少设有四个治具,转换工位使治具在机台上移动。
10.根据本发明所述的一种锂电池短路检测设备,电池上设有盖帽,检测头抵接于盖帽实现检测。
11.根据本发明所述的一种锂电池短路检测设备,电池上设有固定槽,机械手上设有与固定槽配合的连接片,同时机械手上设有吸引电池的吸块,吸块在机械手上伸缩活动。
12.根据本发明所述的一种锂电池短路检测设备,输送通道包括输入传送装置和输出传送装置,输入传送装置位于上料位的上游侧,输出传送装置位于下料位的下游侧。
13.根据本发明所述的一种锂电池短路检测设备,输入传送装置与上料位衔接的部位设有推料装置,推料装置用于推动料盘移动。
14.根据本发明所述的一种锂电池短路检测设备,还设有废料夹手,废料夹手位于机台上与上料位相对的一侧。
15.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
16.下面结合附图和实施例对本发明进一步地说明;
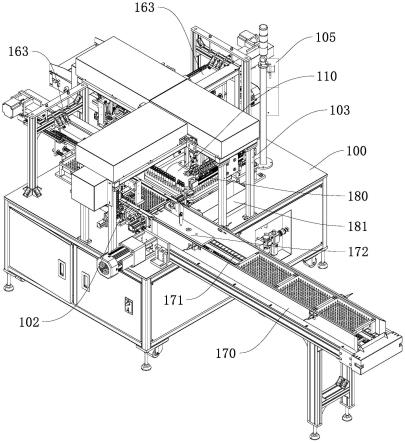
17.图1为本发明实施例一种锂电池短路检测设备的轴测视图;
18.图2为本发明实施例一种锂电池短路检测设备的俯视图;
19.图3为本发明实施例固定装置的轴测视图;
20.图4为本发明实施例固定装置的剖视图;
21.图5为本发明实施例检测装置与转换工位的配合局部视图;
22.图6为本发明实施例转换工位的局部视图;
23.图7为本发明实施例机械手的局部视图;
24.图8为本发明实施例机械手的轴测视图;
25.图9为本发明实施例机械手的背部局部视图;
26.图10为本发明实施例推料装置和输入传送装置的轴测视图;
27.图11为本发明实施例换向装置的轴测视图;
28.图12为本发明实施例废料夹手的轴测视图。
29.附图标记:
30.机台100;上料位101;下料位102;安装架103;上料传感器104;控制面板105;转换工位110;治具111;连通孔112;辅助板113;旋转板114;
31.机械手120;固定板121;连接片122;容纳槽123;吸块124;平移机构125;升降机构126;同步带127;平移板128;
32.固定装置130;夹紧板131;支撑板132;基准板133;导向板134;换向装置136;引导板137;限位块138;旋转台139;
33.牵引机构140;扣接杆141;牵引气缸142;伸出气缸143;牵引板144;
34.检测装置150;阳极测头151;阴极测头152;
35.输入传送装置160;升降台161;传送链162;推料装置163;第一推块164;第二推块165;旋转杆166;驱动板167;驱动模组168;缓冲块169;
36.输出传送装置170;传送带171;升降板172;旋转电机173;
37.废料夹手180;废料盒181;移动模组182;移动机构183;手指气缸184;夹紧块185;升降气缸186;
38.料盘190;外沿191;电池192;盖帽193;分隔柱194;支撑脚195;固定槽196。
具体实施方式
39.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
40.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
42.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
43.参照图1至图12,本发明的实施例提供了一种锂电池短路检测设备,包括机台100、上料位101、检测装置150和下料位102,机台100上设有安装架103,安装架103优选使用钢管或铝管制成的金属框架,用于装设各种运动部件。可选地,机台100设有可活动的转换工位110,转换工位110上设有若干个用于装设电池192的治具111,治具111用于装设电池192工件。可选地,上料位101设有用于固定料盘190的固定装置130和机械手120,固定装置130位于转换工位110的一侧,机械手120把若干个电池192从料盘190搬运至治具111中,一次装夹多个电池192,利于提高效率。可选地,检测装置150位于转换工位110的一侧并滑动连接于机台100,检测装置150设有若干个用于检测的检测头,每个检测头对应一个电池192,利于大批量检测。可选地,下料位102处于转换工位110与检测装置150相对的另一侧,下料位102设有机械手120和固定装置130,机械手120把检测后的电池192从治具111搬运至下料位102中,并实现下料,整个上下料及检测的构成均自动完成,无需人工介入操作,批量检测,提高效率。
44.参照图2和图3,上料位101用于对电池192工件进行上料,在电池192被传送于上料位101时,电池192装设于料盘190中,可选地,料盘190上设有若干个分隔柱194,通过分隔柱194分隔并支撑若干个电池192,整个料盘190上料利于增加设备的工作效率并节省空间。可选地,料盘190使用硬质塑料的材质制成,有助于保证使用强度的情况下实现轻量化,且降低设备的工作负荷。可选地,上料位101中设有固定装置130,固定装置130用于定位并锁定料盘190,利于机械手120的稳定取料。可选地,固定装置130设有导向板134,导向板134位于料盘190的一侧,料盘190输送至上料位101时在导向板134引导料盘190的滑动。可选地,固定装置130上位于料盘190的底部设有可升降活动的支撑板132,支撑板132用于承载料盘190的底部,由于电池192具有一定的重量,满载电池192的料盘190底部容易产生塌陷,底部塌陷后会导致料盘190边缘的进一步变形,进而增加电池192被料盘190侧壁挤压的可能性,
容易导致机械手120取料失败,因此支撑板132的支撑有助于减少料盘190的变形。
45.可选地,固定装置130上设有夹紧板131和基准板133,基准板133为固定连接于机台100上并位于料盘190的一侧,夹紧板131位于料盘190的另一侧并活动连接于固定装置130,当料盘190到达上料位101,夹紧板131在气缸的驱动下伸出并抵接于料盘190的侧壁,并使料盘190贴紧基准板133,用于实现料盘190的定位,便于机械手120的精准取料。然而,在夹紧板131施加压力时,料盘190的侧壁会产生变形,因此会导致挤压电池192,影响到机械手120的顺利取料,因此,在固定装置130上与夹紧板131的同一侧设有牵引机构140,牵引机构140用于牵引料盘190的侧壁并使其复位,避免产生过度的变形。可选地,牵引机构140包括牵引气缸142、牵引板144和扣接杆141,扣接杆141活动连接于牵引板144上,牵引气缸142连接于牵引板144的一端。需要说明的是,料盘190上设有往其外侧延伸的外沿191,同时外沿191往料盘190下方延伸,而构成l型截面的外沿191。在固定机构对料盘190完成夹紧定位同时,牵引机构140通过牵引气缸142带动牵引板144使扣接杆141往料盘190方向移动,扣接杆141在伸出气缸143的带动下插入至外沿191与料盘190侧壁之间,牵引气缸142回动使扣接杆141拉动外沿191的内侧壁,实现保持料盘190的形状,在定位过程中减少料盘190变形。可选地,牵引机构140设于料盘190的两侧,使料盘190两侧保持形状稳定。
46.参照图8,机械手120位于上料位101的上方,并活动设置于安装架103上,机械手120用于把电池192从料盘190中取出,放置于治具111中,便于进行检测工序。可选地,电池192侧壁上具有固定槽196,固定槽196往电池192内部凹陷一定的深度,同时,机械手120上设有与固定槽196连接片122配合的连接片122,同时机械手120上设有吸引电池192的吸块124,吸块124在机械手120上伸缩活动。可选地,机械手120上设有固定板121,固定板121上设有若干个与电池192弧形侧壁适配的容纳槽123,连接片122位于容纳槽123的上部。同时,吸块124滑动连接于固定板121上,优选吸块124使用磁铁实现吸附,并且,在固定板121上与容纳槽123相对的另一端设有平移板128,吸块124固定于平移板128,平移板128通过气缸的驱动在固定板121上移动,用于实现吸块124在固定板121内的运动。当机械手120拾取电池192时,固定板121靠近电池192并使电池192位于容纳槽123内,吸块124滑动接近于电池192侧壁并对电池192产生吸引力,同时连接片122卡接于固定槽196内,实现对电池192的拾取,结构简单,无需夹爪等机构,利于节省空间和成本。可选地,机械手120还包括升降机构126和平移机构125,优选升降机构126和平移机构125均使用同步带127进行传动,实现机械手120的固定板121在垂直方向和水平方向的移动。
47.参照图2和图5,转换工位110旋转连接于机台100上,转换工位110上包括旋转板114,转换工位110设有至少四个治具111,治具111在旋转板114上沿着圆周方向分布,旋转板114通过位于机台100底部的转台电机驱动实现运动,同时,每个治具111中均具有若干个能容纳电池192的腔体,并且,优选若干个电池192沿直线排列,便于实现多个电池192同时检测。
48.可选地,检测装置150位于转换工位110在圆周方向上与上料位101相邻的一侧,检测装置150上具有若干个并列的检测头,通过检测头与电池192的接触并导通一定的电压,进而检测出电池192是否存在短路现象。需要说明的是,电池192上部设有盖帽193,盖帽193位于电池192的阳极部位,同时,检测头包括阳极测头151和阴极测头152,阳极测头151用于与盖帽193压触,阴极测头152与电池192的壳体侧壁压触,用于实现电压的导通。可选地,阳
极测头151和阴极测头152均与检测装置150弹性连接,在检测头与电池192压触时可实现缓冲减震,避免损伤电池192表面。可选地,在治具111上设有连通孔112,连通孔112用于阴极测头152从治具111的侧壁插入并抵接电池192外壳侧壁。可选地,检测装置150在机台100上滑动连接,并优选通过气缸带动和直线滑轨实现导向,在检测过程中平移至靠近治具111,实现检测头与电池192接触并导通。
49.可选地,机台100上设有辅助板113,辅助板113设于转换工位110的中部,且与检测装置150相对而设,可选地,辅助板113的高度与电池192的盖帽193高度相对于,辅助板113在阳极测头151压触盖帽193时伸出,用于支撑盖帽193,便于阳极测头151与盖帽193稳定压触,利于稳定导通。可选地,辅助板113活动连接于机台100上,并且辅助板113可调整高度,以适应不同高度尺寸的电池192,提高使用适应性。可选地,辅助板113的升降和伸缩均由气缸实现,并通过直线滑轨实现导向,利于稳定传动。可选地,辅助板113使用绝缘材料如硅胶、聚氨酯或赛钢等,避免机台100带电而避免产生漏电,保证设备运动安全。参照图6,在机台100上设有上料传感器104,上料传感器104位于转换工位110内且与机械手120位置相对,上料传感器104位于治具111的上方,当机械手120把电池192从料盘190中拾取到治具111中时,上料传感器104检测治具111中是否有缺料的情况,避免检测过程中错误警报。
50.参照图1和图2,下料位102处于转换工位110在圆周方向上与检测装置150相对的另一侧,设有可水平和垂直方向移动的机械手120和用于固定料盘190的固定装置130,当电池192完成检测后,转换工位110通过转动旋转板114把电池192从检测装置150的位置移动到下料位102处,机械手120在平移机构125和升降机构126的驱动下把电池192从治具111搬运至下料位102中,完成下料工序。
51.参照图1,机台100上设有用于运输料盘190的输送通道,上料位101和下料位102分别位于输送通道的上下游处,在电池192检测过程中,空料盘190在转换工位110的外侧进行流转,便于电池192的上料和下料。可选地,输送通道包括输入传送装置160和输出传送装置170,输入传送装置160位于上料位101的上游侧,输出传送装置170位于下料位102的下游侧。可选地,在输送通道上设有若干个光电传感器,用于检测料盘190是否到位的信号并反馈至控制系统,实现料盘190的有序输送。
52.参照图10,输入传送装置160包括传送链162和升降台161,通过使用齿轮带动的传送链162输送料盘190,料盘190上装满待检测的电池192。可选地,输入传送装置160的一端与上料位101衔接,并且在衔接的部位设有升降台161,升降台161上设有升降板172,升降板172通过气缸的驱动在机台100上进行垂直方向的活动。在料盘190上料过程中,料盘190到达输入传送装置160一端与上料位101衔接的部位,升降台161通过驱动升降板172把料盘190升高以使料盘190底部离开传送链162,进而断开对料盘190的驱动力,等待后续把料盘190送进上料位101的操作。
53.可选地,输入传送装置160与上料位101衔接的部位设有推料装置163,推料装置163位于升降台161的上方并装设于安装架103上,推料装置163包括第一推动块和第二推动块,第一推动块用于推动位于升降台161上的料盘190,第二推块165用于推动位于上料位101的料盘190,并且,第一推块164和第二推块165具有预设的间距,有助于使两个料盘190之间保持间距,利于有序上下料。可选地,退料装置设有驱动模组168和驱动板167,驱动模组168带动驱动板167移动,第一推块164和第二推块165位于驱动板167上。进一步地,驱动
板167上还设有旋转杆166,第二推块165位于旋转杆166的末端。由于在第二推块165完成推动料盘190后要缩回,而缩回过程中容易对上游的料盘190产生干涉,因此设置旋转杆166,使第二推块165缩回时旋转而实现避空,避免产生干涉。可选地,在旋转杆166的另一端设有驱动旋转杆166的旋转电机173,旋转电机173固定安装于驱动板167上,可选地,旋转杆166穿过第一推块164,有助于使结构紧凑。可选地,在第一推块164上设有缓冲块169,缓冲块169与第一推块164之间为弹性连接,有助于减少推动料盘190时的冲击。
54.参照图2和图11,上料位101与下料位102之间设有换向装置136,换向装置136用于改变料盘190的朝向,便于在下料位102中料盘190适配电池192装盘的位置,使电池192对准料盘190进行装料。可选地,换向装置136设有旋转台139和引导板137,旋转台139在机台100上通过电机带动旋转,引导板137安装于旋转台139上,引导板137设于料盘190底部,同时,料盘190底部还设有支撑脚195,支撑脚195位于料盘190底部的两侧,而引导板137位于两侧的支撑脚195之间,在推料装置163的推动下,料盘190从上料位101移动到换向装置136上,在料盘190的移动过程中引导板137用于对料盘190的导向。另一方面,在换向装置136的一端设有限位块138,限位块138用于阻挡料盘190防止滑出。可选地,在旋转台139上方设有推料装置163,当下料位102中的料盘190完成装载,推料装置163带动第一推块164和第二推块165,使下料位102中的料盘190送出下料位102,而使位于换向装置136上的料盘190推至下料位102中,等待装载,料盘190输送的过程连贯且自动进行,有助于快速大批量生产。
55.可选地,输出传送装置170的一端连接于下料位102,输出传送装置170设有用于运输料盘190的传送带171,传送带171使用金属传送链162并且通过齿轮驱动,有助于保证输出传送装置170的输送稳定性。同时,在输出传送装置170的一端设有分隔板,分隔板在输出传送装置170上升降活动,并且分隔板位于输出传送装置170上靠近下料位102的一端,当料盘190从下料位102中移动至输出传送装置170上,并且在下游处还有料盘190滞留时,分隔板升起并抬高料盘190,使料盘190的支撑脚195离开传送带171,从而断开输出传送装置170对料盘190的输送动力,便于实现物料的有序输送。
56.参照图1和图12,在机台100上还设有废料夹手180,废料夹手180位于机台100上与上料位101相对的另一侧,可以理解的是,当治具111位于检测装置150处,完成对电池192的短路检测后,发现短路的产品并进行位置标记,反馈至控制系统,在转换工位110带动治具111往废料夹手180处移动后,废料夹手180把相应位置的不及格产品夹持取出,并放置于在废料夹手180下方的废料盒181中。可选地,废料夹爪使用手指气缸184实现对电池192的单独夹取,可选地,在手指气缸184的末端设有夹紧块185,夹紧块185的侧壁与电池192侧壁的形状匹配,并且优选使用柔性材料如聚氨酯、赛钢、abs等塑料,有助于避免刮伤工件,且有助于增加装夹的稳定性。可选地,在废料夹手180上设有移动机构183,移动机构183固定于安装架103上部,同时还设有移动模组182和升降气缸186,移动模组182固定于移动机构183上,移动模组182和移动机构183分别实现废料夹手180在水平上的正交方向移动,升降气缸186设于移动模组182上并且活塞端与手指气缸184连接,带动手指气缸184上下移动,结构简单可靠,能稳定地实现夹取功能。
57.可选地,还设有自动控制系统,自动控制系统分别电连接并控制输入传送装置160、固定装置130、推料装置163、换向装置136、机械手120、转换工位110、检测装置150和输出传送装置170的工作。同时,设有控制面板105,便于工人或技术人员对设备进行监控或调
整,提升自动化程度并提高工作效率。
58.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
59.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1