基于奇偶矢量投影的最大值联合卡方故障排除方法
1.本发明属于导航系统中先进接收机自主完好性监视技术处理领域,具体涉及一种基于奇偶矢量投影的最大值联合卡方故障排除方法。
背景技术:
2.全球卫星导航系统(gnss)由于其全天候,全球性,精度高的优点而受到了广泛的应用。然而,gnss容易受到多种误差因素的影响,导致定位严重偏离真实位置,从而产生不同程度的安全风险。因此,保证导航信息的可信是确保低安全风险的前提。导航信息的可信水平定义为完好性,是指当定位误差超过所允许的界限时及时告警的能力。
3.先进接收机自主完好性监视(araim)作为一种先进的全球导航卫星完好性监视技术,基本原理是利用冗余观测量,对来自多颗卫星的观测量进行一致性检验。判断系统有无故障,实时检测和排除故障源并告警。为了保证导航系统的连续性,可用性,当检测到卫星导航系统的故障后,需要及时排除。故障检测是在整体上判断系统有无故障,故障识别和排除是识别具体的故障星并进行排除。无论是raim还是araim,关于故障识别的基本原理都是为每个故障星算一个故障识别量,识别量越大或者越小约有可能为故障星。近些年来,随着卫星导航星座的建设,越来越多卫星投入使用,多故障情况不容忽视。而,raim只能识别单故障,araim则可以识别多故障,但是在多故障识别时计算量大,尤其是在可用卫星数量多时,会影响系统的实时性。
4.并且,现有的araim里的故障识别算法也是基于多假设解分离(mhss),故障识别的基本原理是采用层次遍历法,当检测到系统有故障后,逐一排除一颗可见星后利用剩余的可见星重复进行故障检测,直到找到一个不产生故障报警的卫星子集组。在进行单故障识别时,需要排除一颗可见星对剩余n-1颗可见星子集进行故障检测,而故障检测的流程也是逐一排除可见星;在多故障识别时,则需要继续对n-2颗可见星进行检测。当卫星数量多时,计算量大,时间复杂度高,无法保证系统的实时性。并且,在多故障情况下由于卫星几何结构的原因,故障量不大时本身不容易一次就准确识别,会出现一定的误排除情况。
技术实现要素:
5.鉴于上述的分析,本发明旨在公开了一种基于奇偶矢量投影的最大值联合卡方故障排除方法,用于在导航定位接收机定位过程中解决故障卫星的排除问题。
6.本发明公开了一种基于奇偶矢量投影的最大值联合卡方故障排除方法,包括以下步骤:在卫星定位过程中检测出导航卫星故障;基于可观测卫星的伪距残差计算奇偶矢量;所述奇偶矢量中保留了测量噪声和卫星故障量的相关信息;计算出能反映每颗可观测卫星故障可能性的奇偶矢量的投影;并基于奇偶矢量投影的长度确定出疑似故障星;
建立排除疑似故障星后由剩余可见星伪距残差构成的最大值联合卡方识别量;并将与最小卡方识别量对应的卫星识别为故障星,标记后进行排除。
7.进一步地,所述奇偶矢量为伪距残差在几何矩阵g的奇偶空间o上的投影;所述几何矩阵g由接收机和可观测卫星之间视线方向上的单位矢量构成;奇偶空间o为几何矩阵g左零空间。
8.进一步地,所述奇偶矢量的计算方法,包括:1)计算可观测卫星的伪距残差向量;2)建立由接收机和可观测卫星之间视线方向上的单位矢量构成的原始的几何矩阵;3)对原始的几何矩阵和伪距残差向量进行标准化得到标准化的几何矩阵和标准化的伪距残差向量;以及满足的奇偶空间o;4)根据公式计算出奇偶矢量,所述为奇偶矢量。
9.进一步地,标准化的几何矩阵;标准化的伪距残差向量;标准化的系数矩阵;其中,的计算式为;表示第n颗卫星用户测距精度的标准差,表示第n颗卫星对流层误差标准差,表示多径和用户接收机噪声误差标准差。
10.进一步地,计算奇偶矢量的投影时,基于故障模式来计算与故障模式所对应的奇偶矢量投影;所述故障模式包括单星故障模式和双星故障模式;其中,单星故障模式为可观测卫星中只有一颗卫星出现故障;在单星故障模式中,一个卫星故障对应一种故障情况,n个可观测卫星对应n种故障情况;在每种故障情况中故障星的奇偶矢量投影为奇偶矢量在故障线上的投影;所述故障线为左零矩阵o上与故障星对应的列向量;其中,双星故障模式为可观测卫星中有两颗卫星同时出现故障;在双星故障模式中,两颗卫星故障组成一种故障情况,n个可观测卫星对应种故障情况;每种故障情况中,故障星组的奇偶矢量投影为奇偶矢量在故障面上的投影;所述故障面为左零矩阵o上与故障星组两颗星对应的列向量所构成的面。
11.进一步地,在单星故障模式的第i种故障情况中,第i颗星为故障星对应的奇偶矢
量投影为;其中,i=1,
…
,n;n为可观测卫星的数量;为左零矩阵o上的第i列;为列向量的一范数;轮询所有故障情况的奇偶矢量投影的长度;选取长度最大的m种故障情况对应的m个卫星做为疑似故障星。
12.进一步地,在单星故障模式下,确定出疑似故障星后的故障星识别排除过程中,包括:1)建立每颗疑似故障星对应的故障识别伪距残差向量;将m种故障情况中,每种故障情况对应的疑似故障的可观测卫星排除后,将剩余可观测卫星的残差构成列向量,m=1,
…
,m;2)利用故障识别伪距残差向量建立最大值联合卡方识别量;利用公式建立最大值联合卡方识别量;3)将与对应的可观测卫星识别为故障星,标记后进行排除。
13.进一步地,在双星故障模式的第l种故障情况中,第l组为故障星组对应的奇偶矢量投影为;其中,;,一个l的值对应一个jk组合;n为可观测卫星的数量;为左零矩阵o上的第j、k列构成的向量平面;轮询所有故障情况的奇偶矢量投影的长度;选取长度最大的m种故障情况对应的m组卫星做为疑似故障星。
14.进一步地,在双星故障模式下,确定出疑似故障星后的故障星识别排除过程中,包括:1)建立每组疑似故障星对应的故障识别伪距残差向量;将m种故障情况中,每种故障情况对应的两颗疑似故障的可观测卫星排除后,将剩余可观测卫星的残差构成列向量,m=1,
…
,m;2)利用故障识别伪距残差向量建立最大值联合卡方识别量;具体的,利用公式建立最大值联合卡方识别量;3)将与对应的可观测卫星识别为故障星,标记后进行排除。
15.进一步地,在故障排除过程中,先进行单星故障模式的故障星故障识别和排除;在排除对应的故障星后的卫星定位过程中仍然检测到导航卫星故障时,则启动双星故障模式的故障排除。
16.本发明可实现以下有益效果之一:1.更少的计算量。与araim里传统的层次滤波的故障排除算法mhss相比,本发明能够显著减少计算量,显著降低时间复杂度,保证系统的实时性。
17.2.更高的识别率。与传统方法相比,本发明采用最大值识别法,认为检验统计量最大的故障模式对应的星为故障星。在多故障情况下,选取最大的两组或三组为疑似故障组
进行进一步卡方识别,提高了故障的识别效果。
18.3.更好的通用性。无论是单纯的卫星导航,还是组合导航,本方法都具有可用性,尤其是组合导航下,可以很大程度上提高故障的识别效果。
附图说明
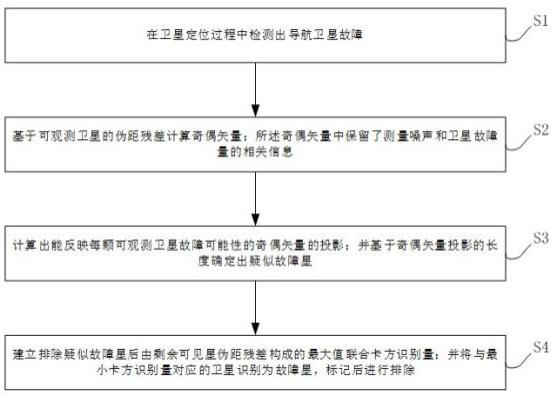
19.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件;图1为本发明实施例中的基于奇偶矢量投影的最大值联合卡方故障排除方方流程图。
具体实施方式
20.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理。
21.本发明的一个实施例公开了一种基于奇偶矢量投影的最大值联合卡方故障排除方法,如图1所示,包括以下步骤:步骤s1、在卫星定位过程中检测出导航卫星故障;步骤s2、基于可观测卫星的伪距残差计算奇偶矢量;所述奇偶矢量中保留了测量噪声和卫星故障量的相关信息;步骤s3、计算出能反映每颗可观测卫星故障可能性的奇偶矢量的投影;并基于奇偶矢量投影的长度确定出疑似故障星;步骤s4、建立排除疑似故障星后由剩余可见星伪距残差构成的最大值联合卡方识别量;并将与最小卡方识别量对应的卫星识别为故障星,标记后进行排除。
22.具体的,导航卫星故障是指gnss受到各种误差因素的影响而产生的建模未包括到的伪距上的非正常偏差。
23.在步骤s1中,故障检测通过判断定位误差是否超过设定的阈值,或者构建的检验统计量是否超过阈值实现。当检测出导航卫星故障时,如不能确定具体的故障星是哪一颗或哪几颗,并将故障卫星从导航接收机的定位过程中排除出去,则无法排除故障,因此,启动本实施例中故障排除方法,对故障卫星进行故障识别和排除。
24.在步骤s2中,所述奇偶矢量为伪距残差在几何矩阵g的奇偶空间o上的投影;所述几何矩阵g由接收机和可观测卫星之间视线方向上的单位矢量构成;奇偶空间o为几何矩阵g左零空间。
25.具体的,所述奇偶矢量的计算方法,包括:1)计算可观测卫星的伪距残差向量;接收机接收到n颗可观测卫星的信号,获得星历数据并依据星历计算卫星的卫星轨道位置,根据接收到的测距码可以计算出到k时刻的卫星的伪距观测值;通过最小二乘法或者组合导航中的滤波输出可以得到用户位置,由卫星和用户的位置可以得到对应时刻的伪距计算值。
26.可观测卫星的伪距残差向量为用户接收机的伪距观测值与最小二乘或根据组合导航滤波器输出位置计算的伪距计算值之间的差值,为n
×
1维向量,伪距残差向量具体计算方式如式2)建立由接收机和可观测卫星之间视线方向上的单位矢量构成的原始的几何矩阵;原始的几何矩阵的具体计算方式参见公式:;其中,,分别表示k时刻由星历得到的第n颗可见星的地心地固坐标系上的三个方向上的坐标,,,表示滤波器输出的用户的坐标,表示第n颗可见星与接收机的位置估计值之间的距离;;几何矩阵前三列分别为卫星和用户接收机的视线方向上的x,y,z方向上的单位向量,第四列为接收机钟差相关系数。
27.3)对原始的几何矩阵和伪距残差向量进行标准化得到标准化的几何矩阵和标准化的伪距残差向量;以及满足的奇偶空间o;由于不同伪距观测值之间有不同大小的测量误差,需要对每个伪距观测值都引入一个权重,权重为测距误差的标准差的倒数,不同测量值之间不相关,则进行标准化的加权矩阵是一个的对角阵。
28.标准化的加权矩阵;其中,的计算式为;表示第n颗卫星用户测距精度的标准差,表示第n颗卫星对流层误差标准差,表示多径和
用户接收机噪声误差标准差。
29.则,标准化的几何矩阵;标准化的伪距残差向量。
30.4)奇偶矢量为伪距残差z在奇偶矩阵o上的投影,根据公式计算出奇偶矢量。
31.在本实施例中,观测到的伪距量包含三个部分:真实距离量、测量噪声和故障量;所述故障量为卫星故障造成的影响等效为伪距上的非正常偏差量。基于此,伪距残差可建模成如下模型;其中x表示最小二乘法或者组合导航滤波中状态量的误差向量,误差向量包括三维位置和时间;v是观测噪声,f是故障量;将伪距残差z带入奇偶矢量;并保留了误差相关的信息得到,如下奇偶矢量表达式;;从式中可推知,奇偶矢量中包含有故障量信息,通过奇偶矢量可以进行故障识别和排除。
32.在步骤s3中,计算出能反映每颗可观测卫星故障可能性的奇偶矢量的投影;时,是基于故障模式来计算与故障模式所对应的奇偶矢量投影;在卫星定位过程中检测出导航卫星故障中一般为由一颗卫星故障引起单颗导航卫星故障或由两颗卫星故障引起的双星故障。同时出现更多颗卫星故障的可能性非常小,并且分析起来更加复杂,不在本发明的考虑范围内。
33.基于此,本实施例中,所述故障模式包括单星故障模式和双星故障模式;其中,单星故障模式为可观测卫星中只有一颗卫星出现故障;在单星故障模式中,一个卫星故障对应一种故障情况,n个可观测卫星对应n种故障情况;在每种故障情况中故障星的奇偶矢量投影为奇偶矢量在故障线上的投影;所述故障线为左零矩阵o上与故障星对应的列向量;其中,双星故障模式为可观测卫星中有两颗卫星同时出现故障;在双星故障模式中,两颗卫星故障组成一种故障情况,n个可观测卫星对应种故障情况;每种故障情况中,故障星组的奇偶矢量投影为奇偶矢量在故障面上的投影;所述故障面为左零矩阵o上与故障星组两颗星对应的列向量所构成的面。
34.具体的,步骤s3中,在单星故障模式的第i种故障情况中,第i颗星为故障星对应的奇偶矢量投影为;其中,i=1,
…
,n;n为可观测卫星的数量;为左零矩阵o上的第i列;为列向量的一范数;轮询所有故障情况的奇偶矢量投影的长度;选取长度最大的m种故障情况对应的m个卫星做为疑似故障星。
35.所述m可根据具体的情况进行设置,例如设定为2或3,即选取长度最大的2或3种故
障情况。下面以3中故障情况为例,举例介绍。
36.通过轮询所有故障情况的奇偶矢量投影的长度;进行投影长度的排序;选出3个最长的投影长度;;其中;将这3个投影长度对应的导航卫星确定为疑似故障星。
37.在步骤s3中在单星故障模式下,确定出疑似故障星后,在步骤s4中,故障星识别排除过程中,包括:1)建立每颗疑似故障星对应的故障识别伪距残差向量;将m种故障情况中,每种故障情况对应的疑似故障的可观测卫星排除后,将剩余可观测卫星的残差构成列向量,m=1,
…
,m;2)利用故障识别伪距残差向量建立最大值联合卡方识别量;具体的,利用公式建立最大值联合卡方识别量;由于伪距残差服从卡方分布,因此服从卡方分布。由于进行故障识别过程中,是先根据最大值选疑似故障星,再计算服从卡方分布的识别量,所以本发明将该识别量命名为最大值联合卡方识别量。
38.3)将与对应的可观测卫星识别为故障星,标记后进行排除。
39.具体的,步骤s3中,在双星故障模式的第l种故障情况中,第l组为故障星组对应的奇偶矢量投影为;其中,;,一个l的值对应一个jk组合;n为可观测卫星的数量;为左零矩阵o上的第j、k列构成的向量平面。
40.轮询所有故障情况的奇偶矢量投影的长度;选取长度最大的m种故障情况对应的m组卫星做为疑似故障星。
41.例如,第2,3颗卫星故障时,对应的故障平面为,为矩阵o的第2,3列。该种故障情况下,奇偶矢量投影为奇偶矢量到故障平面为上的投影;如果其投影的长度为最大的m种故障情况,则由2,3颗卫星组成的卫星组为疑似故障星。
42.在步骤s3中在双星故障模式下,确定出疑似故障星后,在步骤s4中,故障星识别排除过程中,包括:1)建立每组疑似故障星对应的故障识别伪距残差向量;将m种故障情况中,每种故障情况对应的两颗疑似故障的可观测卫星排除后,将剩余可观测卫星的残差构成列向量,m=1,
…
,m;2)利用故障识别伪距残差向量建立最大值联合卡方识别量;具体的,利用公式建立最大值联合卡方识别量;由于伪距残差服从卡方分布,因此服从卡方分布。
43.3)将与对应的可观测卫星识别为故障星,标记后进行排除。
44.单故障识别和多故障识别在理论上是处于并行地位。但在具体的工程实践上,由于单故障发生的概率远大于多故障。因此在优选的方案中,进行故障排除时,先进行单星故障模式的故障星故障识别和排除;在排除对应的故障星后的卫星定位过程中仍然检测到导航卫星故障时,则启动双星故障模式的故障排除。直到将所有的故障星排除后,实现更高的定位精度。
45.综上所述,本发明实施例具有以下有益效果:1.更少的计算量。与araim里传统的层次滤波的故障排除算法mhss相比,本发明能够显著减少计算量,显著降低时间复杂度,保证系统的实时性。
46.2.更高的识别率。与传统方法相比,本发明采用最大值识别法,认为检验统计量最大的故障模式对应的星为故障星。在多故障情况下,选取最大的两组或三组为疑似故障组进行进一步卡方识别,提高了故障的识别效果。
47.3.更好的通用性。无论是单纯的卫星导航,还是组合导航,本方法都具有可用性,尤其是组合导航下,可以很大成都上提高故障的识别效果。
48.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1