基于机械纳米步进调节激光陀螺的背向散射的装置和方法与流程
1.本发明属激光陀螺技术领域,尤其涉及一种基于机械纳米步进调节激光陀螺的装置和方法。
背景技术:
2.激光陀螺是一种高精度、高可靠、长寿命的惯性仪表,广泛用于运载火箭、卫星飞船、导弹武器、航空飞机、潜艇舰船等领域。主要部件为零膨胀微晶玻璃制成的谐振腔,高精度一直是激光陀螺的核心问题和永恒追求。陀螺精度主要取决于闭锁阈值,也即低速下顺逆两路激光的同步。闭锁阈值又来源于反射镜片的散射。反射镜是采用超级抛光技术加工成超光滑表面,一般要求的粗糙度《2
å
。其表面微观起伏程度是以原子尺寸量级的起伏来表征的。正是这些原子量级的微观起伏引起光子的微小散射。每个镜片都会产生背向散射,光路中的总背向散射是每个背向散射的叠加。由于所有的背向散射都是作用在同方向的光路上,此外激光具有高度的相干性,因总背向散射是每个镜片背向散射的矢量叠加。
3.这里:、、、分别是每个反射镜的背向散射矢量。是每个反射镜叠加合成的总背向散射矢量。
4.如图1所示,每个背向散射的初始相位差是随机的,也即每个背向散射矢量、、、的指向方向是随机的,相位差异主要来自于光斑在表面不同位置差异和镜片之间的相对位置。
5.光斑相位在镜片表面又是周期性分布的,因此当光斑在镜片上移动时,背向散射相位也会周期性变化。对正方形陀螺来说,反射镜的移动距离背向散射光可以得到一个完整的调制。激光陀螺实际使用中,外界温度变化、振动过载和陀螺仪自身长期退化等均会导致光路微米级量级的应变,显著改变光斑在反射镜上的位置,引起每个镜片背向散射的相位变化(相当于4中的每个源的散射矢量不同方向旋转起来),从而改变总背向散射和闭锁阈值,要减少这种不确定性,必须对光路中的散射耦合进行控制。
6.背向散射的控制方法是相邻的反射镜一个向内移动,一个向外移动,但始终保持行程相等的反向运动,每个镜片的最大行程为。这样不但可以保证腔长不变,而且四个反射镜上的光场得到周期性的调制,每个镜片背向散射光的相位周期性变化,进而总背向散射的振幅和相位发生周期性变化,使得闭锁阈值也周期性变化。
7.可见,如果没有对闭锁的精确控制回路,使得背向散射未必最小,仪表不能获得小的随机漂移,同时热将引起光路的形变,将导致随机漂移大小的发生变化。如果采取了闭锁
阈值的精确控制,使得背向散射最小,仪表不但将获得最小的随机漂移,也能够使得随机漂移的大小对温度不敏感。
8.现有的专利和文献并并没有涉及对陀螺的散射耦合处理,都是通过电路进行控制,当信号非常微弱时,电路系统往往难以鉴别散射耦合的差异。此外要求电路控制要求稳频机构的调节范围大,给仪表优化设计带来一定困难。
技术实现要素:
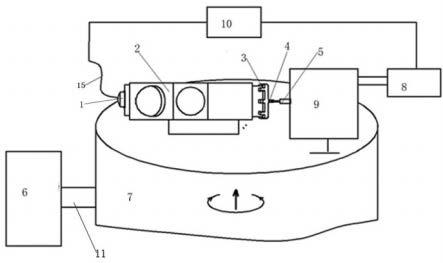
9.为解决上述技术问题,本发明的第一方面提出一种基于机械纳米步进调节激光陀螺的背向散射的装置,所述装置包括:单轴速率转台、稳频卡盘、激光功率探测器、上位计算机和固定在所述单轴速率转台上的精密步进电机;待调整的所述激光陀螺被固定在所述单轴速率转台上;所述稳频卡盘固定连接在所述激光陀螺的一个可调反射镜上,所述精密步进电机用于调整所述稳频卡盘的形变,所述稳频卡盘的形变带动所述可调反射镜的形变以调节所述激光陀螺的激光腔长度;所述激光功率探测器探测激光陀螺输出的激光功率值,并将所述激光陀螺输出的激光功率值馈入所述上位计算机,所述上位计算机通过计算所述激光功率值的交流分量、直流分量及所述激光功率值所对应的所述激光腔长度,以确定所述激光陀螺的背向散射量最小的位置。
10.如本发明的第一方面提出的所述的装置,所述装置还包括一扫描驱动电路,所述上位计算机的输出端与所述扫描驱动电路的输入端连接以控制所述扫描驱动电路的输出电压;所述扫描驱动电路的电压输出端电连接到所述稳频卡盘的电压控制形变元件,所述扫描驱动电路的输出电压控制所述电压控制形变元件的形变,以带动所述可调反射镜产生弯曲形变以改变激光腔长度。
11.如本发明的第一方面提出的所述的装置,所述上位计算机控制所述扫描驱动电路的输出电压按预定幅度和时间长度执行周期性变化。
12.如本发明的第一方面提出的所述的装置,所述稳频卡盘上还连接一调节螺钉,在所述稳频卡盘处于静止状态时,通过调整所述调节螺钉的进退位置使所述可调反射镜产生弯曲形变以改变所述激光陀螺的激光腔长度;所述精密步进电机包括一步进电机夹紧机构,所述精密步进电机通过所述步进电机夹紧机构夹持的螺钉调节工装与所述调节螺钉连接,通过所述精密步进电机的转动调整所述调节螺钉的进退位置以改变所述激光陀螺的激光腔长度。
13.如本发明的第一方面提出的所述的装置,所述装置还包括步进电机驱动器,所述上位计算机通过控制步进电机驱动器以驱动所述精密步进电机以预定步进角度转动以带动所述调节螺钉的步进。
14.如本发明的第一方面提出的所述的装置,当所述调节螺钉螺距为:0.25~ 0.3mm,所述精密步进电机步进角度为10角秒时,可调反射镜镜片的步进量为:1~1.2nm,整个调节流程中,所述可调反射镜镜片总行程量为:900~1100nm。
15.如本发明的第一方面提出的所述的装置,所述装置还包括:所述装置还包括:在所
述激光功率探测器的输出端依次连接一放大器和一滤波器,所述放大器将通过所述激光功率探测器输出的所述激光陀螺的激光功率值放大后由滤波器执行窄带滤波后,分别输出激光功率值的交流分量和直流分量并馈入所述上位计算机的输入端;所述上位计算机通过处理所述交流分量以获得激光陀螺正弦背向散射信号;所述上位计算机通过处理所述直流分量以获取激光陀螺的激光功率;所述滤波器中心工作频率为:1—5khz,所述滤波器的带宽为:100-300hz。
16.本发明的第二方面提出一种基于机械纳米步进调节激光陀螺的背向散射的方法,所述方法包括如下步骤步骤1,将激光陀螺和精密步进电机固定在单轴速率转台上;步骤2,将稳频卡盘固定连接在激光陀螺的一个可调反射镜上,所述稳频卡盘的调节螺钉旋拧到预定初始位置后,将所述精密步进电机通过步进电机夹紧机构夹持的螺钉调节工装与调节螺钉连接;步骤3,启动所述激光陀螺的高压电源产生激光输出;设置所述单轴速率转台以预定转速转动;步骤4,上位计算机进入工作状态,控制扫描驱动电路输出预定幅度和时间长度的周期性变化电压;所述周期性变化电压施加到所述稳频卡盘的电压控制形变电路;步骤5,所述上位计算机控制步进电机驱动器驱动所述精密步进电机以预定步进角度转动,以带动所述调节螺钉的步进;步骤6,在每个步进点上,所述上位计算机针对多个不同腔长模式读取背向散射量;对每个步进点的背向散射量计算其平均值和方差值,存储读取的所述背向散射量和计算出的平均值与方差值;步骤7,所述上位计算机依据步骤6的计算结果确定激光陀螺的背向散射量最小的步进点,所述上位计算机存储所述背向散射量最小的步进点的背向散射量、背向散射量的平均值和背向散射量的方差值;将调节螺钉固定在所述背向散射量最小的步进点的位置。
17.如本发明第二方面所提供的方法,所述单轴速率转台的预定转速为:2-10度/s;扫描驱动电路输出的扫描电压幅度为:0-300v,扫描周期t≥0.5秒;在每个步进点,上位计算机读取的不同腔长模式的背向散射量值的数量为:大于等于7个。
18.如本发明第二方面所提供的方法,步骤7还包括:当所述上位计算机确定背向散射量最小值后,所述上位计算机存储所述背向散射量的最小值所对应的步进点的背向散射量、背向散射量的平均值和背向散射量的方差值;并再沿原步进方向步进到下一个步进点,读取所述下一个步进点的背向散射量、背向散射量的平均值和背向散射量的方差值,比较所述背向散射量的最小值所对应的步进点和所述下一个步进点两点的背向散射量、背向散射量的平均值和背向散射量的方差值,以确定所述对应的步进点位置是背向散射量最小的步进点。
19.采用本发明的方案,具有以下优点:(1)本发明可以避开复杂的电路控制,直接提高仪表性能;(2)本发明不会对仪表的设计、机械接口和电气造成任何影响;(3)本发明配合电路背向散射控制,可以达到更好的长期稳定效果;(4)采用本发明后大致30%的陀螺性能平均提高了一倍,温度环境下性能更加稳
定。
附图说明
20.图1是现有技术的背向散射矢量图;其中,(a)和(b)是两种不同背向散射矢量图。
21.图2是本发明的扫描驱动电压周期图;图3是本发明的背向散射量、平均值和方差与步进位置关系图;图4是本发明的螺钉旋钮工装结构图;图5是本发明的调节激光陀螺背向散射的装置的连接示意图。
22.其中,1.激光功率探测器, 2.激光陀螺,3.可调反射镜,4.稳频卡盘调节螺钉的螺孔孔位,5.螺钉调节工装,6.单轴速率转台控制箱,7.单轴速率转台,8.步进电机驱动器,9.精密步进电机,10.上位计算机,11.控制总线,12.步进电机夹紧机构,13.调节螺钉,14.稳频卡盘,15.激光功率探测器输出信号线。
具体实施方式
23.本发明所要解决的技术解决问题是:为克服现有激光陀螺的背向散射无调节,激光陀螺的精度随机分布,和使用压电陶瓷元件差动调制背向散射量,降低了激光陀螺的环境适应性等缺点。提供一种可靠、精确的控制背向散射最小化的方案,以提高激光陀螺的仪表精度及其稳定性。采用该方案后,若再采用电路控制背向散射,则对仪表稳频机构的调节范围没有特别要求,有利于继承现有设计。
24.本发明提供了一种基于机械纳米步进微调以控制激光陀螺背向散射的方法,适用于各种规格的激光陀螺精度及其稳定性的提高。
25.以下结合附图对本发明的具体实施方式作出详细说明。
26.如图4和图5显示了一种基于机械纳米步进调节激光陀螺的背向散射的装置,其中图4是对本发明的螺钉旋钮工装的结构描述。
27.本发明的第一方面提出一种基于机械纳米步进调节激光陀螺的背向散射的装置,所述装置包括:单轴速率转台7、稳频卡盘14、激光功率探测器1、上位计算机10和固定在所述单轴速率转台7上的精密步进电机9;待调整的所述激光陀螺2被固定在所述单轴速率转台7上;所述稳频卡盘14固定连接在所述激光陀螺2的一个可调反射镜3上,所述精密步进电机9用于调整所述稳频卡盘14的形变,所述稳频卡盘14的形变带动所述可调反射镜3的形变以调节所述激光陀螺2的激光腔长度;所述激光功率探测器1探测激光陀螺2输出的激光功率值,并将所述激光陀螺2输出的激光功率值通过激光功率探测器输出信号线15馈入所述上位计算机10,所述上位计算机10通过计算所述激光功率值的交流分量、直流分量及所述激光功率值所对应的所述激光腔长度,以确定所述激光陀螺2的背向散射量最小的位置。
28.如本发明的第一方面提出的所述的装置,所述装置还包括一扫描驱动电路(未示出),所述上位计算机10的输出端与所述扫描驱动电路的输入端连接以控制所述扫描驱动电路的输出电压;所述扫描驱动电路的电压输出端电连接到所述稳频卡盘14的电压控制形变元件
(未示出),所述扫描驱动电路的输出电压控制所述电压控制形变元件的形变,以带动所述可调反射镜3产生弯曲形变以改变激光腔长度。
29.如本发明的第一方面提出的所述的装置,所述上位计算机10控制所述扫描驱动电路的输出电压按预定幅度和时间长度执行周期性变化。
30.如本发明的第一方面提出的所述的装置,所述稳频卡盘14上还连接一调节螺钉13,在所述稳频卡盘14处于静止状态时,通过调整所述调节螺钉13的进退位置使所述可调反射镜3产生弯曲形变以改变所述激光陀螺2的激光腔长度;所述精密步进电机9包括一步进电机夹紧机构12,所述精密步进电机9通过其步进电机夹紧机构12夹持的螺钉调节工装5与所述调节螺钉13连接,通过所述精密步进电机9的转动调整所述调节螺钉13的进退位置以改变所述激光陀螺2的激光腔长度。
31.如本发明的第一方面提出的所述的装置,所述装置还包括步进电机驱动器8,所述上位计算机10通过控制步进电机驱动器8以驱动所述精密步进电机9以预定步进角度转动以带动所述调节螺钉13的步进。
32.如本发明的第一方面提出的所述的装置,当所述调节螺钉13螺距为:0.25~0.3mm,所述精密步进电机9步进角度为10角秒时,可调反射镜3镜片的步进量为:1~1.2nm,整个调节流程中,所述可调反射镜3镜片总行程量为:900~1100nm。
33.如本发明的第一方面提出的所述的装置,所述装置还包括:在所述激光功率探测器1的输出端依次连接一放大器(未示出)和一滤波器(未示出),所述放大器将通过所述激光功率探测器1输出的所述激光陀螺2输出的激光功率值放大后由滤波器执行窄带滤波后,分别输出激光功率值的交流分量和直流分量并馈入所述上位计算机10的输入端;所述上位计算机10通过处理所述交流分量以获得激光陀螺2正弦背向散射信号;所述上位计算机10通过处理所述直流分量以获取激光陀螺2的激光功率;所述滤波器中心工作频率为:1—5khz,所述滤波器的带宽为:100-300hz。
34.本发明的第二方面提出一种基于机械纳米步进调节激光陀螺的背向散射的方法,所述方法包括如下步骤步骤1,将激光陀螺2和精密步进电机9固定在单轴速率转台7上;步骤2,将稳频卡盘14固定连接在激光陀螺2的一个可调反射镜3上,所述稳频卡盘14的调节螺钉13旋拧到预定初始位置后,将所述精密步进电机通过步进电机夹紧机构12夹持的螺钉调节工装5与调节螺钉13连接;步骤3,启动所述激光陀螺2的高压电源产生激光输出;设置所述单轴速率转台7以预定转速转动;步骤4,上位计算机10进入工作状态,控制扫描驱动电路输出预定幅度和时间长度的周期性变化电压;所述周期性变化电压施加到所述稳频卡盘14的电压控制形变电路(未示出);步骤5,所述上位计算机10控制步进电机驱动器8驱动所述精密步进电机9以预定步进角度转动,以带动所述调节螺钉13的步进;步骤6,在每个步进点上,所述上位计算机10针对多个不同腔长模式读取背向散射量;对每个步进点的背向散射量计算其平均值和方差值,存储读取的所述背向散射量和计算出的平均值与方差值;
步骤7,所述上位计算机10依据步骤6的计算结果确定激光陀螺2的背向散射量最小的步进点,所述上位计算机10存储所述背向散射量最小的步进点的背向散射量、背向散射量的平均值和背向散射量的方差值;将调节螺钉13固定在所述背向散射量最小的步进点的位置。
35.如本发明第二方面所提供的方法,所述单轴速率转台7的预定转速为:2-10度/s;扫描驱动电路输出的扫描电压幅度为:0-300v,扫描周期t≥0.5秒;在每个步进点,上位计算机10读取的不同腔长模式的背向散射量值的数量为:大于等于7个。
36.如本发明第二方面所提供的方法,步骤7还包括:当所述上位计算机10确定背向散射量最小值后,所述上位计算机10存储所述背向散射量的最小值所对应的步进点的背向散射量、背向散射量的平均值和背向散射量的方差值;并再沿原步进方向步进到下一个步进点,读取所述下一个步进点的背向散射量、背向散射量的平均值和背向散射量的方差值,比较所述背向散射量的最小值所对应的步进点和所述下一个步进点两点的背向散射量、背向散射量的平均值和背向散射量的方差值,以确定所述对应的步进点位置是背向散射量最小的步进点。
37.实施例1将激光陀螺2通过位置可调节工装平行安装固定在单轴速率转台7上,单轴速率转台7上横置一个精密步进电机9。
38.如图4及图5所示,在激光陀螺2的可调反射镜3上粘接了一个稳频卡盘14,所述稳频卡盘14的中间设置稳频卡盘调节螺钉的螺孔孔位4,该螺孔用于安装调节螺钉13,在可调反射镜3上固定所述稳频卡盘14后,把调节螺钉13拧入稳频卡盘调节螺钉的螺孔孔位4,调整所述调节螺钉13使其刚好顶住可调反射镜3背面的中央,但又没有给可调反射镜3施加可使它产生弯曲形变压力。
39.精密步进电机9通过步进电机夹紧机构12夹持的螺钉调节工装5与调节螺钉13固定。激光陀螺电极连接高压电路,稳频卡盘14连接扫描驱动电路,该电路输出的电压幅度通常是0-300v,扫描驱动电压波形如图2所示,扫描驱动电压的周期设定为0.5秒以上。
40.单轴速率转台控制箱6通过控制总线11驱动单轴速率转台7以2deg/s以上的某一个转动速度恒定转,开启高压电源点亮激光陀螺2。
41.对激光功率探测器1探测的激光功率信号进行放大和滤波处理,所述激光功率信号中,通常信号的直流分量代表激光功率值,信号的交流分量代表背向散射信号的量值。通过窄带滤波器滤波得到高信噪比的正弦背向散射信号,信号频率与激光陀螺2名义输出频率接近,大致数千hz,背向散射信号幅度大概毫伏量级。由于激光陀螺2的名义输出频率是波动的,因此窄带滤波器的带宽可以设定为数百hz,典型值取100hz左右,能够不失真的保留背向散射的频率信息。背向散射量由窄带滤波后的正弦信号的幅度来表征。
42.如图4和图5所示,在精密步进电机9上安装步进电机夹紧机构12和螺钉调节工装5,使得精密步进电机9能够带动调节螺钉13转动,调节螺钉13的螺距选为0.3mm,精密步进电机9步进角度选择10角秒,因此调节螺钉13以约2.3nm的步长步进。驱动大致900nm的行程。在每个步进点,驱动稳频卡盘14测试每个模式在增益峰值的背向散射量至少7个点并进行软件排序。
43.如图3所示,该图中上、中和下三个圈位分别示意性表示对每个步进点的背向散射
量值、背向散射量平均值和背向散射量方差值。对每个步进点,上位机计算机10的软件对多个模式(通常是7个)的背向散射量取平均值和方差值。在最好的步进位置,平均值和方差会同时达到最小。由于朝一个方向驱动,因此要判断最小位置,必须多步进一步,使得背向散射量稍稍增加,在该位置固定下来即可。
44.由于最小值处于极值点,而温度变化引起的每个单独的散射矢量旋转又是相同的,因此总是能够保持最佳的状态。激光陀螺2性能几乎不随温度的变化未而变化。
45.本发明的转台转速可以进行灵活选取。
46.最后应说明的是,以上实施方式仅用以说明本发明实施例的技术方案而非限制,尽管参照以上较佳实施方式对本发明实施例进行了详细说明,本领域的普通技术人员应当理解,可以对本发明实施例的技术方案进行修改或等同替换都不应脱离本发明实施例的技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1