环境传感器的标定方法、装置、自动驾驶设备及计算机存储介质与流程
本申请实施例涉及计算机,尤其涉及一种环境传感器的标定方法、装置、自动驾驶设备及计算机存储介质。
背景技术:
1、自动驾驶技术是一种依靠计算机与人工智能来操控相应的设备自主行驶的一种技术,也称无人驾驶技术。
2、在自动驾驶技术中,环境感知是其重要的一个组成部分。环境感知主要通过多种类型的环境传感器对自动驾驶设备(如车辆、机器人、飞行器等)的周围环境进行数据感知生成三维点云数据,以应用到自动驾驶决策,比如定位、规控等后端环节。
3、为了基于上述三维点云数据确定出周围环境中的目标物体相对于自动驾驶设备坐标系的位置,需要对环境传感器进行标定,以确定出环境传感器的标定外参,该外参包括:环境传感器在自动驾驶设备上的实际安装位置相对于自动驾驶设备坐标系原点的平移量和欧拉角。
4、已有技术方案中,主要通过手工标定的方式或者点云迭代匹配的方式来确定。对于手工标定的方式来说,通过手动调整环境传感器,直至地面的点云左右和前后的高度几乎相同为止,由此导致标定的误差较大,标定较为耗时,时间成本较高,不利于量产。而对于点云迭代匹配的方式来说,主要基于迭代最近点算法(iterative closest point,简称icp)来实现,由此导致标定的准确性较差,稳定性较弱。
技术实现思路
1、有鉴于此,本申请实施例提供一种环境传感器的标定方案,以至少部分解决上述问题。
2、根据本申请实施例的第一方面,提供了一种环境传感器的标定方法,其包括:
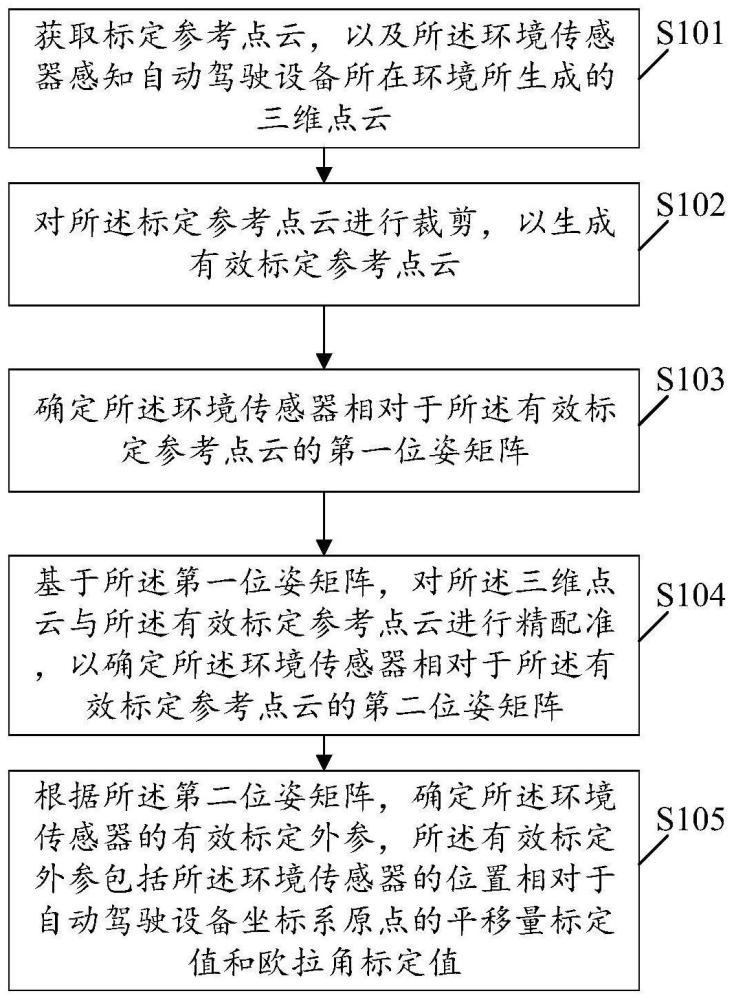
3、获取标定参考点云,以及所述环境传感器感知自动驾驶设备所在环境所生成的三维点云;
4、对所述标定参考点云进行裁剪,以生成有效标定参考点云;
5、确定所述环境传感器相对于所述有效标定参考点云的第一位姿矩阵;
6、基于所述第一位姿矩阵,对所述三维点云与所述有效标定参考点云进行精配准,以确定所述环境传感器相对于所述有效标定参考点云的第二位姿矩阵;
7、根据所述第二位姿矩阵,确定所述环境传感器的有效标定外参,所述有效标定外参包括所述环境传感器的位置相对于自动驾驶设备坐标系原点的平移量标定值和欧拉角标定值。
8、根据本申请实施例的第二方面,提供了一种环境传感器的标定装置,其包括:
9、数据获取单元,用于获取标定参考点云,以及所述环境传感器感知自动驾驶设备所在环境所生成的三维点云;
10、点云裁剪单元,用于对所述标定参考点云进行裁剪,以生成有效标定参考点云;
11、第一位姿矩阵确定单元,用于确定所述环境传感器相对于所述有效标定参考点云的第一位姿矩阵;
12、第二位姿矩阵确定单元,用于基于所述第一位姿矩阵,对所述三维点云与所述有效标定参考点云进行精配准,以确定所述环境传感器相对于所述有效标定参考点云的第二位姿矩阵;
13、转换单元,用于根据所述第二位姿矩阵,确定所述环境传感器的有效标定外参,所述有效标定外参包括所述环境传感器的位置相对于自动驾驶设备坐标系原点的平移量标定值和欧拉角标定值。
14、根据本申请实施例的第三方面,提供了一种自动驾驶设备,其包括:传感器、处理器、存储器、通信接口和通信总线,所述环境传感器、所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
15、所述环境传感器用于对所述自动驾驶设备所在环境进行环境感知,以生成三维点云;
16、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器基于所述感知数据执行如第一方面所述的方法对应的操作。
17、根据本申请实施例的第四方面,提供了一种计算机存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的方法。
18、根据本申请实施例的第五方面,提供了一种计算机程序产品,包括计算机指令,所述计算机指令指示计算设备执行如第一方面所述方法对应的操作。
19、根据本申请实施例提供的环境传感器的标定方案,通过对所述标定参考点云进行裁剪,以生成有效标定参考点云;确定所述环境传感器相对于所述有效标定参考点云的第一位姿矩阵;基于所述第一位姿矩阵,对所述三维点云与所述有效标定参考点云进行精配准,以确定所述环境传感器相对于所述有效标定参考点云的第二位姿矩阵;根据所述第二位姿矩阵,确定所述环境传感器的有效标定外参,所述有效标定外参包括所述环境传感器的位置相对于自动驾驶设备坐标系原点的平移量标定值和欧拉角标定值,实现了标定过程的自动化,降低了标定误差,缩短了标定的耗时,降低了时间成本,便于进行量产。另外,由于在对所述标定参考点云进行裁剪的基础上,进行了粗配准和精配准的结合,从而提高了标定的准确性,稳定性良好。
技术特征:
1.一种环境传感器的标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述标定参考点云进行裁剪,以生成有效标定参考点云,包括:对所述标定参考点云进行裁剪,以保留所述标定参考点云中与所述三维点云的有效区域重合的点云,以将其作为所述有效标定参考点云。
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述标定环境为长方体标定间,所述自动驾驶设备基于从所述标定环境中选定的第一参考平面为参照,按照设置的摆正标准放置在所述标定环境中。
6.根据权利要求5所述的方法,其特征在于,所述标定环境中还设置有障碍物,以设置欧拉角阈值,以将所述欧拉角阈值作为所述粗标定要求;
7.根据权利要求1-6任一项所述的方法,其特征在于,所述确定所述环境传感器相对于所述有效标定参考点云的第一位姿矩阵,包括:
8.根据权利要求7所述的方法,其特征在于,所述方法还包括:根据所述标定环境,对所述欧拉角标定值进行修正。
9.根据权利要求8所述的方法,其特征在于,所述根据所述标定环境,对所述有效标定外参进行修正,包括:根据从所述标定环境中选定的第二参考平面,对所述欧拉角标定值进行修正。
10.根据权利要求9所述的方法,其特征在于,所述根据从所述标定环境中选定的第二参考平面,对所述欧拉角标定值进行修正,包括:
11.根据权利要求10所述的方法,其特征在于,若所述参考平面的数量为多个,所述拟合点云平面的数量对应为多个,所述法向量的数量对应为多个;
12.根据权利要求11所述的方法,其特征在于,所述统计值为所有法向量的倾斜角的加权平均值。
13.根据权利要求11所述的方法,其特征在于,所述方法还包括:对所述有效标定外参的精确度进行评估。
14.一种环境传感器的标定装置,其特征在于,包括:
15.一种自动驾驶设备,其特征在于,包括:环境传感器、处理器、存储器、通信接口和通信总线,所述环境传感器、所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
16.一种计算机存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-13中任一所述的方法。
技术总结
本申请提供一种环境传感器的标定方法、装置、自动驾驶设备及计算机存储介质,通过获取标定参考点云,以及环境传感器感知自动驾驶设备所在环境所生成的三维点云;对标定参考点云进行裁剪,以生成有效标定参考点云;确定所述环境传感器相对于所述有效标定参考点云的第一位姿矩阵;基于第一位姿矩阵,对三维点云与有效标定参考点云进行精配准,以确定环境传感器相对于有效标定参考点云的第二位姿矩阵;根据第二位姿矩阵,确定环境传感器的有效标定外参,实现了标定过程的自动化,降低了标定误差,缩短了标定的耗时,降低了时间成本,便于进行量产,提高了标定的准确性,稳定性良好。
技术研发人员:钦培
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!