一种FPSO上部模块吊装姿态检测及调整方法与流程
一种fpso上部模块吊装姿态检测及调整方法
技术领域
1.本发明涉及一种姿态调整方法,尤其涉及一种适用于一种fpso上部模块吊装姿态检测及调整方法。
背景技术:
2.浮式生产储卸油装置(fpso)是深水油田开发的重要工程设施,fpso上部模块是实现fpso作业的重要模块,fpso上部模块的安装一般是由浮吊将其吊起,再转移到fpso的船体部分进行后续安装。
3.fpso上部模块形体巨大、形状各异,造成与船体的对接定位困难,在fpso生产现场一般是利用浮吊将fpso上部模块移至大致的对接位置,再由现场多名工人指导浮吊对fpso上部模块的姿态进行微调,往往需要反复调整,费时费力,因此在fpso上部模块安装过程中亟需一种高效稳定、便捷易行的fpso吊装姿态检测及调整方法。
技术实现要素:
4.本发明的目的在于克服已有技术的缺点,提供一种可以提升fpso上部模块对接安装的精确度的fpso上部模块吊装姿态检测及调整方法。
5.本发明的一种fpso上部模块吊装姿态检测及调整方法,包括如下步骤:
6.步骤一、在fpso上部模块底部四周安装四个激光传感器,所述的四个激光传感器分别为第一激光传感器、第二激光传感器、第三激光传感器、第四激光传感器,四个激光传感器呈长方形布置,设第一激光传感器激光发射点与第二激光传感器激光发射点之间的距离与第三激光传感器激光发射点与第四激光传感器激光发射点之间的距离相等且为l1,设第一激光传感器激光发射点与第三激光传感器激光发射点之间的距离与第二激光传感器激光发射点与第四激光传感器激光发射点之间的距离相等且为l2;
7.以fpso上部模块底壁处于水平平面时,fpso上部模块底壁中点为坐标原点建立直角坐标系,坐标系z’轴的方向为竖直方向向上,x’的方向为第四激光传感器激光发射点指向第一激光传感器激光发射点,y’轴方向为第一激光传感器激光发射点指向第二激光传感器激光发射点;
8.步骤二、使用浮吊将fpso上部模块吊起到指定的高度h;
9.步骤三、使用四个激光传感器判断此时fpso上部模块姿态是否竖直,若不竖直则利用浮吊缆绳进行姿态调整,其中判断fpso上部模块是否为竖直姿态的具体步骤如下:
10.第一步、使用四个激光传感器分别测量竖直方向激光传感器激光发射点距离fpso船体甲板平面的距离,设第一激光传感器、第二激光传感器、第三激光传感器、第四激光传感器的读数分别为h1、h2、h3、h4;若h1=h2=h3=h4,则fpso上部模块姿态竖直,执行步骤四;否则第一激光传感器激光发射点的坐标为(-l1/2,l2/2,h
1-h)、第二激光传感器激光发射点的坐标为(l1/2,l2/2,h
2-h)、第三激光传感器激光发射点的坐标为(-l1/2,-l2/2,h
3-h)、第四激光传感器激光发射点的坐标为(l1/2,-l2/2,h
4-h),进行第二步;
11.第二步、使用最小二乘法,以第一激光传感器、第二激光传感器、第三激光传感器、第四激光传感器的激光发射点为拟合点,利用四点坐标将四点拟合为平面π1,平面π1的法向量i记为(a,b,c),法向量i与坐标系z’轴方向向量j的夹角即为倾斜角,记倾斜角为α;
12.第三步、使用全站仪实时观测,利用浮吊缆绳将fpso上部模块调整角度α;
13.步骤三、在fpso船体甲板上标记出与第一激光传感器、第二激光传感器、第三激光传感器、第四激光传感器的激光发射点相对应的点a,b,c,d,以点a,b,c,d所围成的矩形的中心为原点,建立直角坐标系,z轴的方向为竖直方向向上,x轴方向为d点指向点a,y轴方向为点a指向点b,计算fpso上部模块绕z轴旋转的角度β和沿x轴、y轴平移的量δx、δy,具体步骤如下:
14.第一步、在fpso船体甲板上标记出与第一激光传感器、第二激光传感器、第三激光传感器、第四激光传感器的激光发射点相对应的点a,b,c,d,开启四个激光传感器,使用第一激光传感器测量第一激光传感器激光发射点到点a的距离、使用第二激光传感器测量第二激光传感器激光发射点到点b的距离、使用第三激光传感器测量第三激光传感器激光发射点到点c的距离、使用第四激光传感器测量第四激光传感器激光发射点到点d的距离,分别记为d1、d2、d3、d4;
15.第二步,计算第一激光传感器激光发射点与点a连线、第二激光传感器激光发射点与点b连线、第三激光传感器激光发射点与点c连线、第四激光传感器激光发射点与点d连线在fpso船体甲板平面投影的距离,分别记为d1、d2、d3、d4;
16.第三步,求解第一激光传感器激光发射点相对于点a绕z轴旋转的角度β1和沿x轴、y轴平移的量δx1、δy1;
17.第四步,求解第二激光传感器激光发射点相对于点b绕z轴旋转的角度β3和沿x轴、y轴平移的量δx2、δy2;
18.第五步,求解第三激光传感器激光发射点相对于点c绕z轴旋转的角度β3和沿x轴、y轴平移的量δx3、δy3;
19.第六步,求解第四激光传感器激光发射点相对于点d绕z轴旋转的角度β4和沿x轴、y轴平移的量δx4、δy4;
20.第七步,计算fpso上部模块绕z轴旋转的角度β和沿x轴、y轴平移的量δx、δy;
21.步骤四、使用全站仪实时观测,使用吊机将fpso上部模块绕z轴旋转角度β,再沿x轴移动δx,沿y轴移动δy;
22.步骤五、使用吊机将fpso上部模块沿着z轴缓缓下降h,开始fpso上部模块的安装工作。
23.本发明的优点:本发明使用激光传感器作为测距工具,快捷高效,准确度高。能快速、准确的检测出fpso上部模块所处的姿态与位置,可以对fpso上部模块姿态与位置的调整做出精确地指导。减少了人工操作环节,不仅降低了事故的发生率,而且提升了fpso上部模块安装定位的效率,能有效缩短工期,利于减少项目成本。
附图说明
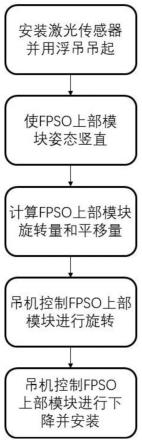
24.图1是一种fpso上部模块吊装姿态检测及调整方法流程图;
25.图2是一种fpso上部模块吊装姿态检测及调整方法步骤二建立的坐标系示意图;
26.图3是一种fpso上部模块吊装姿态检测及调整方法步骤三建立的坐标系示意图。
具体实施方式
27.下面结合附图和具体实施例对本发明进行详细描述。
28.步骤一、在fpso上部模块底部四周安装四个激光传感器,所述的四个激光传感器分别为第一激光传感器1、第二激光传感器2、第三激光传感器3、第四激光传感器4,四个激光传感器呈长方形布置,设第一激光传感器1激光发射点与第二激光传感器2激光发射点之间的距离与第三激光传感器3激光发射点与第四激光传感器4激光发射点之间的距离相等且为l1,设第一激光传感器1激光发射点与第三激光传感器3激光发射点之间的距离与第二激光传感器2激光发射点与第四激光传感器4激光发射点之间的距离相等且为l2。
29.以fpso上部模块底壁处于水平平面时,fpso上部模块底壁中点为坐标原点建立直角坐标系,坐标系z’轴的方向为竖直方向向上,x’的方向为第四激光传感器4激光发射点指向第一激光传感器1激光发射点,y’轴方向为第一激光传感器1激光发射点指向第二激光传感器2激光发射点;
30.步骤二、使用浮吊将fpso上部模块吊起到指定的高度h;
31.步骤三、使用四个激光传感器判断此时fpso上部模块姿态是否竖直,若不竖直则利用浮吊缆绳进行姿态调整,其中判断fpso上部模块是否为竖直姿态的具体步骤如下:
32.第一步、使用四个激光传感器分别测量竖直方向激光传感器激光发射点距离fpso船体甲板平面的距离,设第一激光传感器1、第二激光传感器2、第三激光传感器3、第四激光传感器4的读数分别为h1、h2、h3、h4。若h1=h2=h3=h4,则fpso上部模块姿态竖直,执行步骤四;否则第一激光传感器1激光发射点的坐标为(-l1/2,l2/2,h
1-h)、第二激光传感器2激光发射点的坐标为(l1/2,l2/2,h
2-h)、第三激光传感器3激光发射点的坐标为(-l1/2,-l2/2,h
3-h)、第四激光传感器4激光发射点的坐标为(l1/2,-l2/2,h
4-h),进行第二步。
33.第二步、使用最小二乘法,以第一激光传感器1、第二激光传感器2、第三激光传感器3、第四激光传感器4的激光发射点为拟合点,利用四点坐标将四点拟合为平面π1,平面π1的法向量i记为(a,b,c),法向量i与坐标系z’轴方向向量j的夹角即为倾斜角,记倾斜角为α,则α由下式求出。
[0034][0035]
其中,a,b,c分别为法向量i的x,y,z坐标
[0036]
第三步、使用全站仪实时观测,利用浮吊缆绳将fpso上部模块调整角度α;
[0037]
步骤三、在fpso船体甲板上标记出与第一激光传感器1、第二激光传感器2、第三激光传感器3、第四激光传感器4的激光发射点相对应的点a,b,c,d,以点a,b,c,d所围成的矩形的中心为原点,建立直角坐标系,z轴的方向为竖直方向向上,x轴方向为d点指向a点,y轴方向为a点指向b点,计算fpso上部模块绕z轴旋转的角度β和沿x轴、y轴平移的量δx、δy。具体步骤如下:
[0038]
第一步、在fpso船体甲板上标记出与第一激光传感器1、第二激光传感器2、第三激光传感器3、第四激光传感器4的激光发射点相对应的点a,b,c,d,开启四个激光传感器,使用第一激光传感器1测量第一激光传感器1激光发射点到点a的距离、使用第二激光传感器
测量第二激光传感器2激光发射点到点b的距离、使用第三激光传感器3测量第三激光传感器3激光发射点到点c的距离、使用第四激光传感器4测量第四激光传感器4激光发射点到点d的距离,分别记为d1、d2、d3、d4。
[0039]
第二步,计算第一激光传感器1激光发射点与点a连线、第二激光传感器2激光发射点与点b连线、第三激光传感器3激光发射点与点c连线、第四激光传感器4激光发射点与点d连线在fpso船体甲板平面投影的距离,分别记为d1、d2、d3、d4。d1、d2、d3、d4由下式求出:
[0040][0041]
其中,h为浮吊将fpso上部模块吊起的高度。
[0042]
第三步,求解第一激光传感器1激光发射点相对于点a绕z轴旋转的角度β1和沿x轴、y轴平移的量δx1、δy1,可由以下方程解出:
[0043][0044]
其中,l1为第一激光传感器1激光发射点与第二激光传感器2激光发射点之间的距离(也即第三激光传感器3激光发射点与第四激光传感器4激光发射点之间的距离);
[0045]
l2为第一激光传感器1激光发射点与第三激光传感器3激光发射点之间的距离(也即第二激光传感器2激光发射点与第四激光传感器4激光发射点之间的距离);
[0046]
x
′
、y
′
为中间变量,作用是使方程简洁,可以通过求解方程得到。
[0047]
x1为点a的横坐标;
[0048]
y1为点a的纵坐标。
[0049]
第四步,求解第二激光传感器2激光发射点相对于点b绕z轴旋转的角度β3和沿x轴、y轴平移的量δx2、δy2,可由以下方程解出:
[0050]
[0051]
其中,x2为点b的横坐标;
[0052]
y2为点b的纵坐标。
[0053]
第五步,求解第三激光传感器3激光发射点相对于点c绕z轴旋转的角度β3和沿x轴、y轴平移的量δx3、δy3,可由以下方程解出:
[0054][0055]
其中,x3为c点的横坐标;
[0056]
y3为c点的纵坐标。
[0057]
第六步,求解第四激光传感器4激光发射点相对于点d绕z轴旋转的角度β4和沿x轴、y轴平移的量δx4、δy4,可由以下方程解出:
[0058][0059]
其中,x4为d点的横坐标;
[0060]
y4为d点的纵坐标。
[0061]
第七步,计算fpso上部模块绕z轴旋转的角度β和沿x轴、y轴平移的量δx、δy,计算公式如下。
[0062][0063]
[0064][0065]
步骤四、使用全站仪实时观测,使用吊机将fpso上部模块绕z轴旋转角度β,再沿x轴移动δx,沿y轴移动δy。
[0066]
步骤五、使用吊机将fpso上部模块沿着z轴缓缓下降h,开始fpso上部模块的安装工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1