基于毫米波雷达的生物体识别系统及方法与流程
1.本发明涉及精密探测智能识别技术领域,更具体地说,本发明涉及基于毫米波雷达的生物体识别系统及方法。
背景技术:
2.目前,现有技术中常用的生物体识别往往使用视频监控或者红外传感,且生物体识别仍然难以满足精密细微动作探测识别的技术要求;涉及到生物体容易引起抵触,而红外生物体感应只能用于判定生物体的有无状态,难以获取生物体精确位置信息;存在问题包括:如何获得探测生物体微动基础数据;如何建立生物体微动全系标化数据模型;如何分析待识别生物体识别全系微动特征;如何进行全面细微的生物体识别等;因此,有必要提出基于毫米波雷达的生物体识别系统及方法,以至少部分地解决现有技术中存在的问题。
技术实现要素:
3.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明;本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
4.为至少部分地解决上述问题,本发明提供了基于毫米波雷达的生物体识别系统,其特征在于,包括:
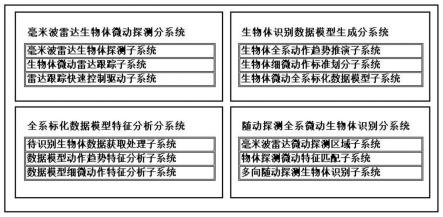
5.毫米波雷达生物体微动探测分系统:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;
6.生物体识别数据模型生成分系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;
7.全系标化数据模型特征分析分系统:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;
8.随动探测全系微动生物体识别分系统:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
9.优选的,毫米波雷达生物体微动探测分系统,包括:
10.毫米波雷达生物体探测子系统:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;
11.生物体微动雷达跟踪子系统:通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;
12.雷达跟踪快速控制驱动子系统:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向。
13.优选的,生物体识别数据模型生成分系统,包括:
14.生物体全系动作趋势推演子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;
15.生物体细微动作标准划分子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;
16.生物体微动全系标化数据模型子系统:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型。
17.优选的,全系标化数据模型特征分析分系统,包括:
18.待识别生物体数据获取处理子系统:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;
19.数据模型动作趋势特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;
20.数据模型细微动作特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
21.优选的,随动探测全系微动生物体识别分系统,包括:
22.毫米波雷达微动探测区域子系统:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;
23.物体探测微动特征匹配子系统:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;
24.多向随动探测生物体识别子系统:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
25.本发明提供了基于毫米波雷达的生物体识别方法,其特征在于,包括:
26.s100:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;
27.s200:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;
28.s300:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;
29.s400:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
30.优选的,s100,包括:
31.s101:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;
32.s102:通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;
33.s103:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向。
34.优选的,s200,包括:
35.s201:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;
36.s202:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;
37.s203:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型。
38.优选的,s300,包括:
39.s301:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;
40.s302:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;
41.s303:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
42.优选的,s400,包括:
43.s401:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;
44.s402:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;
45.s403:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
46.本发明的有益效果为:本发明提供了基于毫米波雷达的生物体识别系统,利用毫米波雷达生物体微动探测分系统:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;生物体识别数据模型生成分系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;全系标化数据模型特征分析分系统:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;随动探测全系微动生物体识别分系统:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别;使毫米波雷达对生物体微动作识别更精准,生物体识别的覆盖面更广,毫米波雷达生物体识别适用性更强。
47.本发明所述的基于毫米波雷达的生物体识别系统及方法,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
48.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
49.图1为本发明所述的基于毫米波雷达的生物体识别系统图。
50.图2为本发明所述的基于毫米波雷达的生物体识别系统一个实施例图。
51.图3为本发明所述的基于毫米波雷达的生物体识别方法图。
具体实施方式
52.下面结合附图以及实施例对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施;如图1-3所示,本发明提供了基于毫米波雷达的生物体识别系统,其特征在于,包括:
53.毫米波雷达生物体微动探测分系统:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;
54.生物体识别数据模型生成分系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;
55.全系标化数据模型特征分析分系统:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;
56.随动探测全系微动生物体识别分系统:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
57.上述技术方案的工作原理为:本发明提供了基于毫米波雷达的生物体识别系统,包括:毫米波雷达生物体微动探测分系统:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;生物体识别数据模型生成分系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;全系标化数据模型特征分析分系统:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;随动探测全系微动生物体识别分系统:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
58.上述技术方案的有益效果为:本发明提供了基于毫米波雷达的生物体识别系统,包括:毫米波雷达生物体微动探测分系统:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;生物体识别数据模型生成分系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;全系标化数据模型特征分析分系统:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;随动探测全系微动生物体识别分系统:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别;使毫米波雷达对生物体微动作识别更精准,生物体识别的覆盖面更广,毫米波雷达生物体识别适用性更强。
59.在一个实施例中,毫米波雷达生物体微动探测分系统,包括:
60.毫米波雷达生物体探测子系统:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;
61.生物体微动雷达跟踪子系统:通过毫米波雷达微动探测跟踪生物体微动,快速探
测生物体微动位置、生物体微动速度及生物体微动方位角度;
62.雷达跟踪快速控制驱动子系统:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;
63.通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据。
64.上述技术方案的工作原理为:毫米波雷达生物体微动探测分系统,包括:毫米波雷达生物体探测子系统:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;生物体微动雷达跟踪子系统:通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;雷达跟踪快速控制驱动子系统:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;
65.通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据。
66.上述技术方案的有益效果为:毫米波雷达生物体微动探测分系统,包括:毫米波雷达生物体探测子系统:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;生物体微动雷达跟踪子系统:通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;雷达跟踪快速控制驱动子系统:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;
67.通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据;使毫米波雷达对生物体微动作识别更精准。
68.在一个实施例中,生物体识别数据模型生成分系统,包括:
69.生物体全系动作趋势推演子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;
70.生物体细微动作标准划分子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;
71.生物体微动全系标化数据模型子系统:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型。
72.上述技术方案的工作原理为:生物体识别数据模型生成分系统,包括:生物体全系动作趋势推演子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;生物体细微动作标准划分子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;生物体微动全系标化数据模型子系统:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型。
73.上述技术方案的有益效果为:生物体识别数据模型生成分系统,通过生物体全系动作趋势推演子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;生物体细微动作标准划分子系统:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;生物体微动全系标化数据模型子系统:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型;通过计算生物体微动全系标化数据模型最优迭代权值,使生物体微动全系标化数据模型误差更小。
74.在一个实施例中,全系标化数据模型特征分析分系统,包括:
75.待识别生物体数据获取处理子系统:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;
76.数据模型动作趋势特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;
77.数据模型细微动作特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
78.上述技术方案的工作原理为:全系标化数据模型特征分析分系统,包括:待识别生物体数据获取处理子系统:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;数据模型动作趋势特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;数据模型细微动作特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
79.上述技术方案的有益效果为:全系标化数据模型特征分析分系统,通过待识别生物体数据获取处理子系统:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;数据模型动作趋势特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行
生物体全系标化动作特征分析;数据模型细微动作特征分析子系统:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征;生物体识别的覆盖面更广。
80.在一个实施例中,随动探测全系微动生物体识别分系统,包括:
81.毫米波雷达微动探测区域子系统:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;
82.物体探测微动特征匹配子系统:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;
83.多向随动探测生物体识别子系统:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
84.上述技术方案的工作原理为:随动探测全系微动生物体识别分系统,包括:毫米波雷达微动探测区域子系统:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;物体探测微动特征匹配子系统:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;多向随动探测生物体识别子系统:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
85.上述技术方案的有益效果为:随动探测全系微动生物体识别分系统,通过毫米波雷达微动探测区域子系统:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;物体探测微动特征匹配子系统:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;多向随动探测生物体识别子系统:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别;毫米波雷达生物体识别适用性更强。
86.本发明提供了基于毫米波雷达的生物体识别方法,其特征在于,包括:
87.s100:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;
88.s200:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;
89.s300:将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;
90.s400:根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
91.上述技术方案的工作原理为:本发明提供了基于毫米波雷达的生物体识别方法,其特征在于,包括:通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别。
92.上述技术方案的有益效果为:本发明提供了基于毫米波雷达的生物体识别方法,通过毫米波雷达探测采集生物体微动基础数据,获得毫米波雷达探测生物体微动基础数据;根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演及生物体细微动作标准划分,建立生物体微动全系标化数据模型;将待识别生物体数据输入生物体微动全系标化大数据模型,分析待识别生物体识别全系微动特征;根据待识别生物体识别全系微动特征,通过毫米波雷达探测生物体微动,匹配待识别生物体识别微动特征,进行毫米波雷达探测全系微动生物体识别;使毫米波雷达对生物体微动作识别更精准,生物体识别的覆盖面更广,毫米波雷达生物体识别适用性更强。
93.在一个实施例中,s100,包括:
94.s101:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;
95.s102:通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;
96.s103:根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据。
97.上述技术方案的工作原理为:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;
98.通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据。
99.上述技术方案的有益效果为:通过毫米波发生器生成探测生物体毫米波,并通过毫米波接收天线接收探测生物体反射波;通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;根据接收探测生物体反射波方向,快速控制驱动毫米波雷达的毫米波发生器主跟随探测方向;
100.通过毫米波雷达微动探测跟踪生物体微动,快速探测生物体微动位置、生物体微
动速度及生物体微动方位角度包括:将毫米波雷达的毫米波发生器同时连接以三角形排布的三组指向性微带发射天线;三组指向性微带发射天线在未探测到生物体时分别按照独立发射方向发射探测毫米波;当任意一组指向性微带发射天线的探测毫米波探测到生物体时,三组指向性微带发射天线同时指向生物体方向,进行增强指向毫米波雷达微动探测跟踪生物体微动;并通过三组指向性微带发射天线的指向三角关系及反射波频移,直接快速探测生物体微动位置、生物体微动速度及生物体微动方位角度;获得毫米波雷达探测生物体微动基础数据;使毫米波雷达对生物体微动作识别更精准。
101.在一个实施例中,s200,包括:
102.s201:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;
103.s202:根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;
104.s203:根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型。
105.上述技术方案的工作原理为:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型;
106.计算生物体微动全系标化数据模型最优迭代权值:
[0107][0108]
其中,tzdwg表示生物体微动全系标化数据模型最优迭代权值,tdqh表示生物体微动全系标化数据模型前置权值,k表示参照分布标准探测总数量,qi表示第i个参照分布标准探测和随机分布探测的探测次数,zdw(n)表示标准分布第n个探测距离,c表示标准分布探测的探测角三角算子,ldw(n)表示临近参照分布第n个标准探测距离,p随机分布探测的探测距离,w表示随机分布探测的探测角三角算子,k表示迭代次数,探测角三角算子的计算方式包括:第i个探测角的正弦三角函数式;通过计算生物体微动全系标化数据模型最优迭代权值,使生物体微动全系标化数据模型误差更小。
[0109]
上述技术方案的有益效果为:根据毫米波雷达探测生物体微动基础数据,进行生物体全系动作趋势推演,获得生物体全系动作趋势数据;根据毫米波雷达探测生物体微动基础数据,进行生物体细微动作标准划分,获得生物体细微动作标准数据;根据生物体全系动作趋势数据及生物体细微动作标准数据,通过生物信息整合创建生物体微动全系标化数据模型;
[0110]
计算生物体微动全系标化数据模型最优迭代权值:其中,tzdwg表示生物体微动全系标化数据模型最优迭代权值,tdqh表示生物体微动全系标化数据模型前置权值,k表示参照分布标准探测总数量,qi表示第i个参照分布标准探测和随机分布探测的探测次数,zdw(n)表示标准分布第n个探测距离,c表示标准分布探测的探测角三角算子,ldw(n)表示临近
参照分布第n个标准探测距离,p随机分布探测的探测距离,w表示随机分布探测的探测角三角算子,k表示迭代次数,探测角三角算子的计算方式包括:第i个探测角的正弦三角函数式;通过计算生物体微动全系标化数据模型最优迭代权值,使生物体微动全系标化数据模型误差更小。
[0111]
在一个实施例中,s300,包括:
[0112]
s301:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;
[0113]
s302:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;
[0114]
s303:将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
[0115]
上述技术方案的工作原理为:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征。
[0116]
上述技术方案的有益效果为:将通过生物体信息源搜集待识别生物体数据,并对待识别生物体数据进行模型输入规范数据处理,获得待识别生物体模型规范数据;将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进行生物体全系标化动作特征分析;将待识别生物体模型规范数据输入生物体微动全系标化数据模型,进一步进行生物体细微动作特征分析;获得待识别生物体识别全系微动特征;生物体识别的覆盖面更广。
[0117]
在一个实施例中,s400,包括:
[0118]
s401:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;
[0119]
s402:判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;
[0120]
s403:当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
[0121]
上述技术方案的工作原理为:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别。
[0122]
上述技术方案的有益效果为:根据待识别生物体识别全系微动特征,毫米波雷达扫描探测区域范围内物体;判定探测区域范围内物体是否有物体动作符合待识别生物体识别全系微动特征;当有符合待识别生物体识别全系微动特征出现时,控制毫米波雷达探测跟踪并通过多向随动识别生物体微动,进行毫米波雷达随动探测全系微动生物体识别;毫米波雷达生物体识别适用性更强。
[0123]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地
实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节与这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1