一种线性马达校准方法及电子设备与流程
本技术涉及终端,尤其涉及一种线性马达校准方法及电子设备。
背景技术:
1、线性马达凭借振感强烈、清脆、能耗低等优势,已广泛应用各类电子设备中。电子设备内配置线性马达之后,在识别出需要振动的应用场景(比如,手机识别到来电)的情况下,可以驱动线性马达进行振动,实现设备的振动功能。
2、通常电子设备采用线性马达的谐振频率驱动对应的线性马达,以达到较佳的振动效果。然而,随着设备的老化,线性马达的谐振频率会发生变化。谐振频率变化之后,如果电子设备继续按照原谐振频率驱动线性马达的振动效果就会变差。也就是,电子设备中线性马达的谐振频率是需要校准的。
3、然而,相关技术中的校准线性马达谐振频率的方法,在谐振频率偏移较大之后,校准效果也会变差。
技术实现思路
1、本技术实施例提供一种线性马达校准方法及电子设备,用于解决线性马达老化后,线性马达的校准效果不佳的问题。
2、为达到上述目的,本技术的实施例采用如下技术方案:
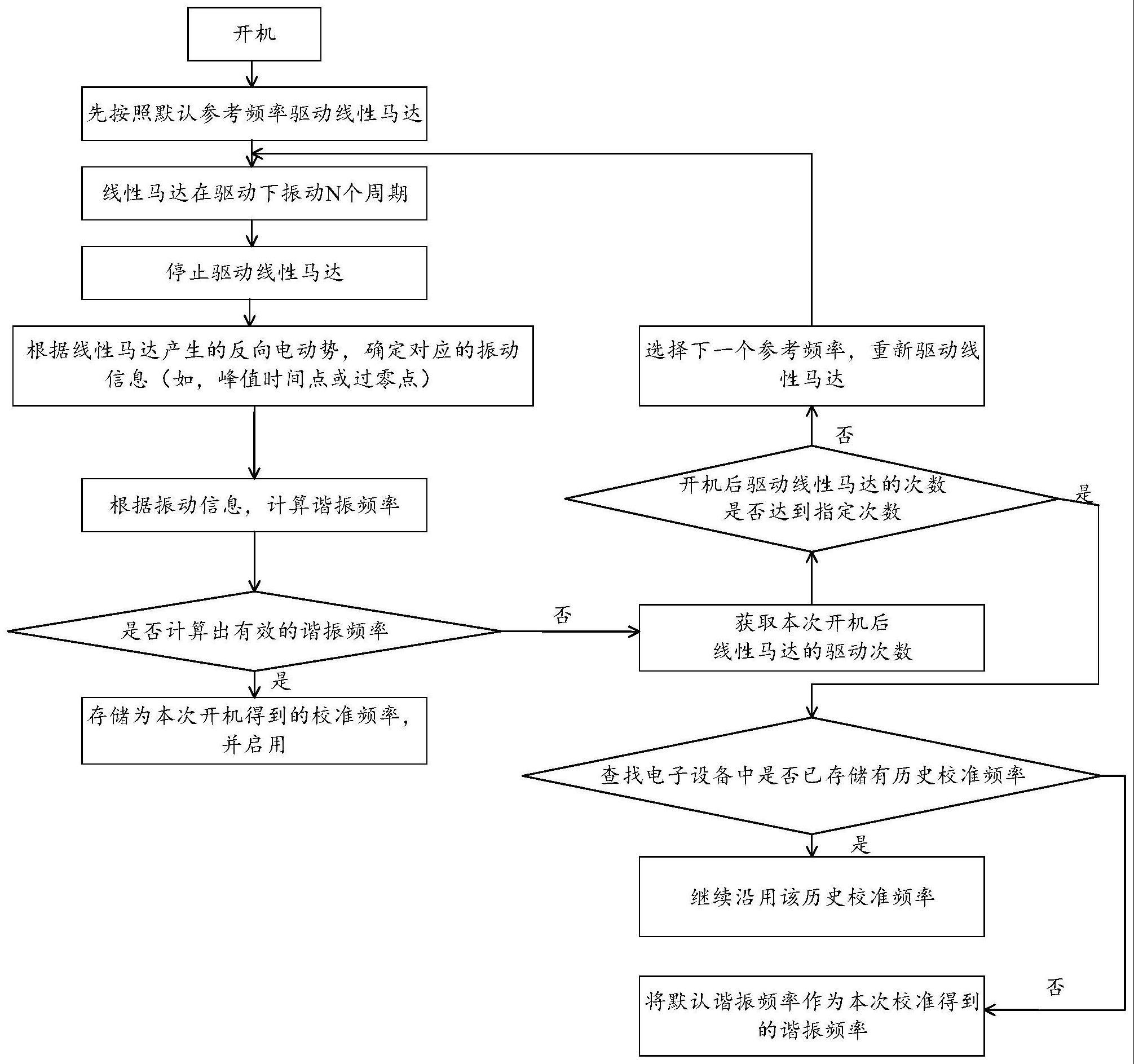
3、第一方面,本技术实施例提供的一种线性马达校准方法,应用于包含线性马达的第一设备,第一设备中配置有第一频率和第二频率,所述方法包括:在按照第一频率驱动线性马达振动n个周期之后,停止驱动线性马达,第一频率包含在第一频率区间;其中,在停止驱动线性马达之后,线性马达进行第一次阻尼振荡;获取线性马达在第一次阻尼振荡期间的第一振动信息,第一振动信息包括所述线性马达在第一次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在第一振动信息指示的第一谐振频率不属于第一频率区间时,按照第二频率驱动所述线性马达;在按照第二频率驱动所述线性马达振动n个周期之后,停止驱动线性马达,第二频率包含在第二频率区间;其中,在停止驱动所述线性马达之后,线性马达进行第二次阻尼振荡;获取线性马达在第二次阻尼振荡期间的第二振动信息,第二振动信息包括所述线性马达在第二次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在所述第二振动信息指示的第二谐振频率属于第二频率区间的情况下,检测到第一事件,其中,第一事件为触发所述第一设备振动的事件;响应于第一事件,按照第二谐振频率驱动线性马达。
4、在上述实施例中,通过配置多个用于驱动线性马达的频率,如,第一频率和第二频率,增加校准谐振频率的容错率。这样,即使线性马达随着使用时间的增长,谐振频率发生改变,电子设备也能够通过采用不同驱动频率进行校准,测出有效的谐振频率,提高线性马达的校准效果,保障后续使用过程中的振动效果。
5、在一些实施例中,第一频率满足第一条件,所述第一条件包括以下任意一条:第一频率被标记有第一标记,第一标记为用户预先配置的标识;所述第一频率对应的第一差值比所述第二频率对应的第二差值小,所述第一差值为所述第一频率与第三谐振频率之间的绝对差,所述第二差值为所述第二频率与所述第三谐振频率之间的绝对差,所述第三谐振频率是所述线性马达的配置文件包含的谐振频率;或者,所述第一频率对应的第三差值比所述第二频率对应的第四差值小,所述第三差值为所述第一频率和第四谐振频率之间的绝对差,所述第四差值为所述第二频率与所述第四谐振频率之间的绝对差,所述第四谐振频率为所述第一设备上一次开机后校准出的谐振频率。
6、在上述实施例中,第一频率可以是初判为能够测出有效谐振频率的驱动频率。这样,在第一次驱动线性马达进行测试之后,提高首次测出有效谐振频率的概率。当然,即使首次驱动线性马达未测出有效的谐振频率,也可以选择其他频率(如,第二频率),驱动线性马达,再次进行测试,提高校准出线性马达当前的谐振频率的可能。
7、在一些实施例中,在按照所述第一频率驱动所述线性马达振动之前,所述方法包括:从第一服务器获取多台第二设备中校准出的谐振频率,第二设备和第一设备的设备型号相同,且安装的所述线性马达的马达型号也相同;对多台所述第二设备校准出的谐振频率进行聚类,得到第一聚类簇和第二聚类簇;在所述第一聚类簇中,确定出所述第一频率,以及,在所述第二聚类簇中确定出所述第二频率;将所述第一频率和所述第二频率配置于所述第一设备。
8、在上述实施例中,通过同类型马达在同类型设备中谐振频率的表现,确定出用于校准线性马达的第一频率和第二频率,这样得到的第一频率和第二频率,更容易校准出线性马达的谐振频率。
9、在一些实施例中,在所述第二振动信息指示的第二谐振频率属于第二频率区间之后,所述方法还包括:将所述第二谐振频率、所述第一设备的设备型号以及所述线性马达的马达型号,发送给所述第一服务器。
10、在一些实施例中,在所述第二振动信息指示的第二谐振频率属于第二频率区间之后,所述方法还包括:将所述第二谐振频率更新到第一存储位置,所述第一存储位置用于存储已校准出的谐振频率;在所述按照所述第二谐振频率驱动所述线性马达之前,所述方法还包括:从所述第一存储位置读取所述第二谐振频率。
11、在一些实施例中,所述方法还包括:在所述第二振动信息指示的第二谐振频率不属于第二频率区间的情况下,确定第一次数,所述第一次数为本次开机后驱动所述线性马达的次数;在所述第一次数不小于第一值的情况下,检测到所述第一事件;在第一存储位置中存储有第四谐振频率的情况下,响应于所述第一事件,按照所述第四谐振频率驱动所述线性马达,所述第一存储位置用于存储已校准出的谐振频率,所述第四谐振频率为上一次开机后校准出的谐振频率。
12、在上述实施例中,在线性马达谐振频率偏移太多无法校准的特殊场景下,可以保证电子设备使用期间能够正常驱动线性马达。
13、在一些实施例中,所述方法还包括:在所述第一存储位置中未存储有第四谐振频率的情况下,响应于所述第一事件,按照第三谐振频率驱动所述线性马达,所述第三谐振频率是所述线性马达的配置文件包含的谐振频率。
14、在一些实施例中,所述方法还包括:在所述第二振动信息指示的第二谐振频率不属于第二频率区间的情况下,确定第一次数,所述第一次数为本次开机后驱动所述线性马达的次数;在所述第一次数等于第一值,且第一存储位置中存储有第四谐振频率的情况下,按照第四谐振频率驱动所述线性马达,所述第一存储位置用于存储已校准出的谐振频率,所述第四谐振频率为上一次开机后校准出的谐振频率;在按照所述第四谐振频率驱动所述线性马达振动n个周期之后,停止驱动所述线性马达,所述第四谐振频率包含于第三频率区间,其中,在停止驱动所述线性马达之后,所述线性马达进行第三次阻尼振荡;获取所述线性马达在第三次阻尼振荡期间的第三振动信息,所述第三振动信息包括所述线性马达在所述第三次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在所述第三振动信息指示的第五谐振频率属于第三频率区间时,将所述第五谐振频率更新到所述第一存储位置;检测到所述第一事件;响应于所述第一事件,按照所述第五谐振频率驱动所述线性马达。
15、在上述实施例中,通过将上一次开机校准出的谐振频率作为驱动频率,对线性马达进行校准,提升校准出线性马达谐振频率的可能。
16、在一些实施例中,在所述按照所述第二频率驱动所述线性马达之前,所述方法还包括:根据所述第一振动信息中相邻两个所述峰值时间点之间差值,计算所述第一谐振频率。
17、在一些实施例中,在所述按照所述第一频率驱动所述线性马达振动n个周期之前,所述方法包括:响应于指示开机的操作,按照所述第一频率驱动所述线性马达。
18、在一些实施例中,按照第一频率测试线性马达的谐振频率和按照第二频率测试线性马达的谐振频率,都可以是在开机之后的开机流程中完成,提高校准线性频率的效率。
19、在另一些实施例中,按照第一频率测试线性马达的谐振频率可以是在开机后的开机流程中完成。按照第二频率测试线性马达的谐振频率,可以在开机后检测到第一事件之后完成。这样,减少多次校准对用户使用体验的影响。
20、第二方面,本技术实施例提供的一种电子设备,电子设备包括一个或多个处理器和存储器;所述存储器与处理器耦合,存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当一个或多个处理器执行计算机指令时,所述一个或多个处理器,用于:在按照所述第一频率驱动所述线性马达振动n个周期之后,停止驱动所述线性马达,第一频率包含在第一频率区间;其中,在停止驱动所述线性马达之后,线性马达进行第一次阻尼振荡。获取所述线性马达在第一次阻尼振荡期间的第一振动信息,所述第一振动信息包括所述线性马达在所述第一次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在所述第一振动信息指示的第一谐振频率不属于所述第一频率区间时,按照所述第二频率驱动所述线性马达;在按照所述第二频率驱动所述线性马达振动n个周期之后,停止驱动所述线性马达,所述第二频率包含在第二频率区间;其中,在停止驱动所述线性马达之后,所述线性马达进行第二次阻尼振荡;获取所述线性马达在第二次阻尼振荡期间的第二振动信息,所述第二振动信息包括所述线性马达在所述第二次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在所述第二振动信息指示的第二谐振频率属于所述第二频率区间的情况下,检测到第一事件,其中,所述第一事件为触发所述第一设备振动的事件;响应于所述第一事件,按照所述第二谐振频率驱动所述线性马达。
21、在一些实施例中,所述第一频率满足第一条件,所述第一条件包括以下任意一条:所述第一频率被标记有第一标记,所述第一标记为用户预先配置的标识;所述第一频率对应的第一差值比所述第二频率对应的第二差值小,所述第一差值为所述第一频率与第三谐振频率之间的绝对差,所述第二差值为所述第二频率与所述第三谐振频率之间的绝对差,所述第三谐振频率是所述线性马达的配置文件包含的谐振频率;或者,所述第一频率对应的第三差值比所述第二频率对应的第四差值小,所述第三差值为所述第一频率和第四谐振频率之间的绝对差,所述第四差值为所述第二频率与所述第四谐振频率之间的绝对差,所述第四谐振频率为所述第一设备上一次开机后校准出的谐振频率。
22、在一些实施例中,在按照所述第一频率驱动所述线性马达振动之前,所述一个或多个处理器,用于:从第一服务器获取多台第二设备中校准出的谐振频率,所述第二设备和第一设备的设备型号相同,且安装的所述线性马达的马达型号也相同;对多台所述第二设备校准出的谐振频率进行聚类,得到第一聚类簇和第二聚类簇;在所述第一聚类簇中,确定出所述第一频率,以及,在所述第二聚类簇中确定出所述第二频率;将所述第一频率和所述第二频率配置于所述第一设备。
23、在一些实施例中,在所述第二振动信息指示的第二谐振频率属于第二频率区间之后,所述一个或多个处理器,用于:将所述第二谐振频率、所述第一设备的设备型号以及所述线性马达的马达型号,发送给所述第一服务器。
24、在一些实施例中,在所述第二振动信息指示的第二谐振频率属于第二频率区间之后,所述方法还包括:将所述第二谐振频率更新到第一存储位置,所述第一存储位置用于存储已校准出的谐振频率;在所述按照所述第二谐振频率驱动所述线性马达之前,所述方法还包括:从所述第一存储位置读取所述第二谐振频率。
25、在一些实施例中,所述一个或多个处理器,用于:在第二振动信息指示的第二谐振频率不属于第二频率区间的情况下,确定第一次数,所述第一次数为本次开机后驱动所述线性马达的次数;在所述第一次数不小于第一值的情况下,检测到所述第一事件;在第一存储位置中存储有第四谐振频率的情况下,响应于所述第一事件,按照所述第四谐振频率驱动所述线性马达,所述第一存储位置用于存储已校准出的谐振频率,所述第四谐振频率为上一次开机后校准出的谐振频率。
26、在一些实施例中,所述一个或多个处理器,用于:在所述第一存储位置中未存储有第四谐振频率的情况下,响应于所述第一事件,按照第三谐振频率驱动所述线性马达,所述第三谐振频率是所述线性马达的配置文件包含的谐振频率。
27、在一些实施例中,所述一个或多个处理器,用于:在所述第二振动信息指示的第二谐振频率不属于第二频率区间的情况下,确定第一次数,所述第一次数为本次开机后驱动所述线性马达的次数;在所述第一次数等于第一值,且第一存储位置中存储有第四谐振频率的情况下,按照第四谐振频率驱动所述线性马达,所述第一存储位置用于存储已校准出的谐振频率,所述第四谐振频率为上一次开机后校准出的谐振频率;在按照所述第四谐振频率驱动所述线性马达振动n个周期之后,停止驱动所述线性马达,所述第四谐振频率包含于第三频率区间,其中,在停止驱动所述线性马达之后,所述线性马达进行第三次阻尼振荡;获取所述线性马达在第三次阻尼振荡期间的第三振动信息,所述第三振动信息包括所述线性马达在所述第三次阻尼振荡期间振动幅度对应的峰值时间点或过零点;在所述第三振动信息指示的第五谐振频率属于第三频率区间时,将所述第五谐振频率更新到所述第一存储位置;检测到所述第一事件;响应于所述第一事件,按照所述第五谐振频率驱动所述线性马达。
28、在一些实施例中,在所述按照所述第二频率驱动所述线性马达之前,所述一个或多个处理器,用于:根据所述第一振动信息中相邻两个所述峰值时间点之间差值,计算所述第一谐振频率。
29、在一些实施例中,在所述按照所述第一频率驱动所述线性马达振动n个周期之前,所述一个或多个处理器,用于:响应于指示开机的操作,按照所述第一频率驱动所述线性马达。
30、第三方面,本技术实施例提供的一种计算机存储介质,包括计算机指令,当计算机指令在电子设备上运行时,使得电子设备执行上述第一方面及其可能的实施例中的方法。
31、第四方面,本技术提供一种计算机程序产品,当计算机程序产品在上述电子设备上运行时,使得电子设备执行上述第一方面及其可能的实施例中的方法。
32、可以理解地,上述各个方面所提供的电子设备、计算机存储介质以及计算机程序产品均应用于上文所提供的对应方法,因此,其所能达到的有益效果可参考上文所提供的对应方法中的有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!