一种非同步测量技术在多点异面低频声源3D成像方法与流程
本发明涉及信号处理,尤其涉及一种非同步测量技术在多点异面低频声源3d成像方法。
背景技术:
1、非同步测量(non-synchronous measurement,简称:nsm)是一种通过声场顺序扫描实现低频声定位性能的有效方法,是通过移动单个平面阵列来实现更大、更密集的孔径阵列,有证据表明,通过对移动麦克风阵列的非同步测量,可以提高在二维平面上的声源定位的精度,然而,现有的方法只能在2000hz以上的频率下进行声源成像,在噪声源识别与定位中,声源成像研究一般用平面阵列在二维平面中成像,其中非同步测量主要以平面移动为主,二维平面阵列的非同步测量方法序贯移动平面阵列,扫描空间分布的声源,近似获得大孔径及高密度的传声器阵列的测量,再通过传统波束形成算法成像,对声源定位。
2、目前,3d球形麦克风阵列应用在三维平面成像中,非同步测量的方式依旧延续了平面阵列在远场二维平面成像的方法,采用了水平移动,在一定程度上提高了cbf空间分辨率,但未做出在3d空间中的创新,然而,现有文献还未曾出现过以3d球阵列自转结合3d球阵列中心公转作为移动轨迹的特点。
技术实现思路
1、本发明的目的是提供利用3d球阵列中心呈3d螺旋公转轨迹结合球阵列自转的移动方式,真正的实现了点声源的高分辨率,有利于大范围、远距离测量以及可以借用机械装置进行智能自动化测量的一种非同步测量技术在多点异面低频声源3d成像方法。
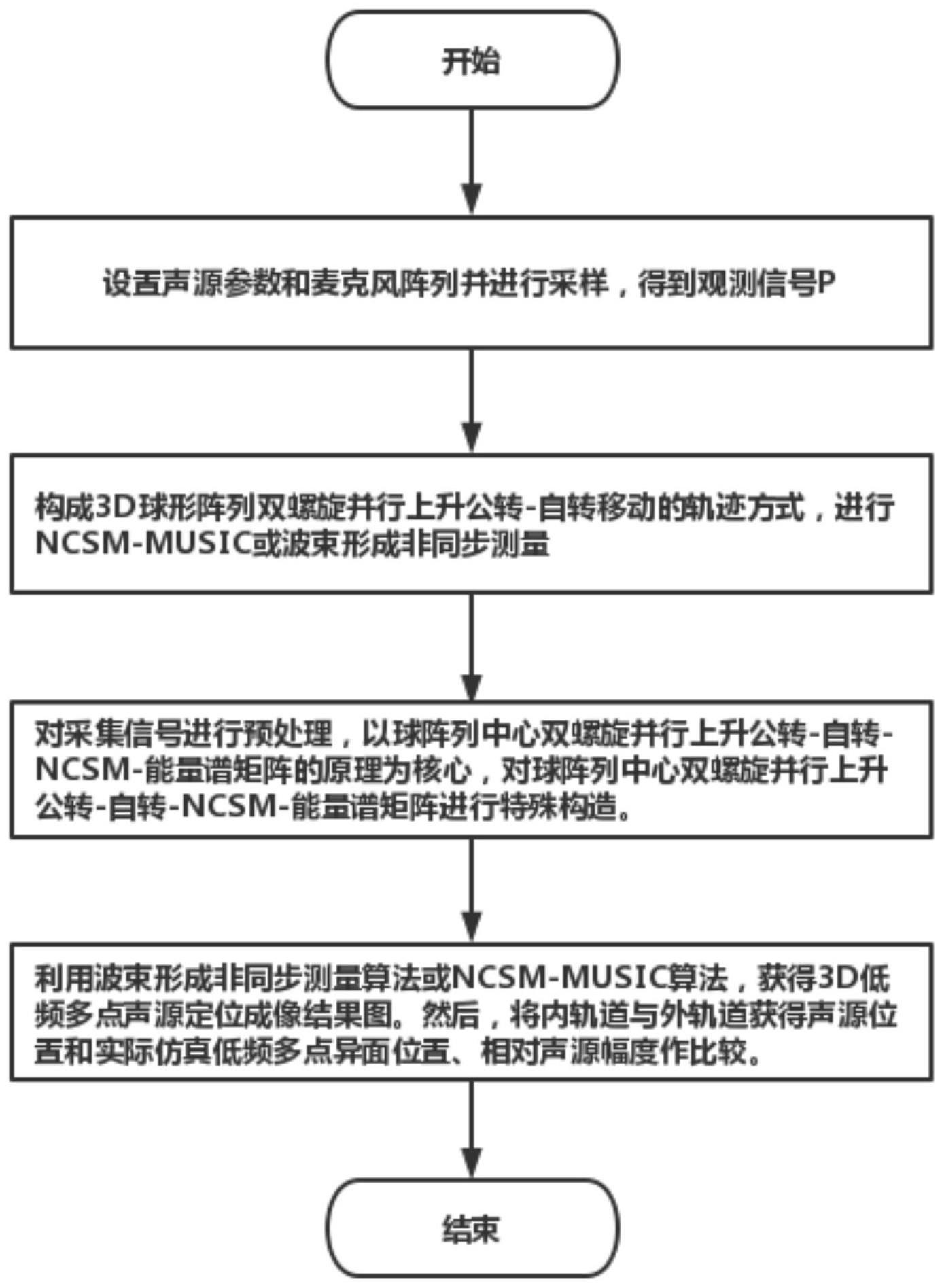
2、为了实现上述目的,本发明提供如下技术方案:一种非同步测量技术在多点异面低频声源3d成像方法,包括以下步骤:
3、s01:利用双螺旋公式构成3d球形麦克风阵列中心移动的3d双螺旋公转轨迹方式,然后结合3d球形麦克风阵列自转的特点,进行3d双螺旋公转-自转-3d非同步测量;
4、s02:常规非同步测量是通过移动单个平面阵列来实现更大、更密集的孔径阵列,3d双螺旋公转-自转-3d非同步测量是针对特殊的双螺旋公转轨迹均分极角(3d双螺旋弧轨迹),根据3d球阵列中心移动3d球形麦克风阵列的,进一步对3d球形麦克风进行等极角自转,使得不同位置对应不同的麦克风分布,优点在于超过使用单个固定平面阵列的测量所定义的约束,同时,3d双圆柱形螺旋并行上升公转,达到了互补作用,且在一定空间领域上改善了纵向声源分辨率成像;
5、s03:利用波束形成算法和柱面非同步测量的多信号分类算法能够实现多点异面声源的成像,首先,利用两个3d球阵列分别自转结合3d双螺旋公转移动轨迹,在每点处进行采集信号,并对信号进行预处理;然后,进行交叉谱矩阵的构造,并利用快速的迭代阈值收缩算法填充;最后,利用波束形成算法或柱面非同步测量的多信号分类算法成像。
6、作为上述技术方案的进一步描述:
7、所述步骤s01中,进行声源3d成像方法是利用点排列构造成3d双螺旋式公转结合球阵列自转的非同步测量方法,是一种真实场景中非同步测量方式的改进,3d双螺旋式公转是为了使阵列更大、更加密集,而对于单个固定阵列,自转是为了使得原本固定不变的稀疏阵列变为密集阵列,同时又保留了3d球阵列的模式,其中,球阵列中心3d双螺旋式公转轨迹以及球阵列自转的公式为:
8、
9、
10、θ1=θ1+ω1*t
11、θ2=θ2+ω2*t
12、
13、其中,x11表示螺旋线1公转x轴位移,y11表示螺旋线1公转y轴位移,x12表示螺旋线2公转x轴位移,y12表示螺旋线2公转y轴位移,z1表示公转z轴位移,r1表示距离球阵列中心移动轨迹的距离,θ1表示3d螺旋公转角度范围,x2表示自转x轴位移,y2表示自转y轴位移,z2表示自转z轴位移,r2表示距离球阵列中心到麦克风的距离,表示自转仰角,θ2表示自转平面角度范围,ω1表示球阵列3d螺旋公转角速度,ω2表示球阵列自转角速度,t表示时间。
14、作为上述技术方案的进一步描述:
15、所述步骤s02中,对于低频多点异面声源而言,假设声源为稳态声源,将声源分布在各个角落中,而3d球形阵列(带有m个麦克风)以等角度
16、γ,3d螺旋公转移动结合等角度γ自转移动到个位置,并采集每个位置的信号。
17、作为上述技术方案的进一步描述:
18、所述步骤s03中,对于低频多点异面声源而言,利用波束形成算法和柱面非同步测量的多信号分类算法成像方法如下所示;
19、s03.1:假设声源为稳态声源,将声源分布在各个角落中,而3d球形阵列(带有m个麦克风)以等角度γ、3d双螺旋公转轨迹移动结合等角度γ自转移动到个位置,并采集每个位置的信号;
20、s03.2:在源平面上假设有q不相关的远场窄带信号,因此,在柱面非同步测量中第{l}th(l=1,...,l)位置接收到的数据向量可以在频域中表示为:
21、p{l}=g{l}s+e{l}
22、其中,s=[s1,...,sq]t∈cqx1为频域内的远场窄带不相关信号;p是是接收到的信号向量;e表示模型的不确定性,包括噪声干扰和模型逼近;
23、s03.3:假设噪声是独立的和同分布的(i.i.d.)遵循复高斯分布的随机变量;为空间阵列的导向矢量;
24、
25、其中,和t′分别表示声源的位置矢量和信号发射时刻,和t分别表示接收端的位置矢量和信号接收时刻,|·|表示向量的模,δ(.)表示狄拉克函数;
26、s03.4:根据谱矩阵的特定构造和算法填充,具体步骤可以表示为:柱面非同步测量的第二步是协方差矩阵补全,利用柱面非同步测量可以得到公转轨迹中每个测量位置的小协方差矩阵将接收到的信号数据向量p{l}的协方差矩阵表示为:
27、
28、其中,是不相关源的协方差矩阵,表示qth源的功率;
29、s03.5:可以直接获得一个块对角矩阵,表示缺失项的合成协方差矩阵,其非对角块为空,由于缺少连续位置之间的相位关系而替换为零,然后,一个完整的合成协方差矩阵可以得到矩阵,最后,要对协方差矩阵继续进行稀疏性对称矩阵的快速特征值分解,目的是为了使算法快速、准确成像;
30、s03.6:协方差矩阵补全问题可以表述为一个约束优化问题,快速迭代收缩阈值分析算法被用来求解约束优化问题,与同时测量相比,算法不可避免地会导致矩阵补全误差,一个完整的协方差矩阵的优化模型为:
31、
32、其中||·||*表示一个矩阵的核范数,它被定义为特征值λi的和,目标函数最小化是寻找具有最小核范数
33、a(·)表示获取矩阵的对角线块中的元素的采样运算符;
34、s03.7:a:根据谱矩阵的特定构造和算法填充,柱面非同步测量的多信号分类算法成像过程可以表示为:
35、
36、其中,为的矢量形式,由测量的声压计算得到,它是由麦克风阵列在每个柱面非同步测量位置的实际位置计算出来的,u是rss中特征值对应的特征向量张成的子空间。
37、b:根据谱矩阵的特定构造和算法填充,波束形成算法成像过程可以表示为:
38、
39、其中,pbf为的矢量形式,由测量的声压计算得到,它是由麦克风阵列在每个位置的实际位置计算出来的,用于补偿前向传播的时间延迟和幅度衰减。;
40、s03.8:通过2范数计算内轨道与外轨道获得低频声源成像的误差:
41、
42、
43、在上述技术方案中,本发明提供的一种非同步测量技术在多点异面低频声源3d成像方法,具有以下有益效果:
44、该多点异面低频声源3d成像方法利用3d球阵列中心呈3d螺旋公转轨迹结合球阵列自转的移动方式,针对多点异面声源,能够使用3d螺旋式并行上升公转-自转-非同步测量技术,一定程度上近似得到更大孔径、更高密度的传声器阵列测量结果,且达到了互补的作用,还能进一步提高纵向分辨率,最后通过波束形成算法或柱面非同步测量的多信号分类算法在低频(500hz以下)多点异面处快速成像,成功改进了当前三维空间只能在高频处成像的效果,真正的实现了点声源的高分辨率,有利于大范围、远距离测量以及可以借用机械装置进行智能自动化测量。
- 还没有人留言评论。精彩留言会获得点赞!