基于数据补偿的TDOA定位方法
基于数据补偿的tdoa定位方法
技术领域
1.本发明属于通信技术领域,更进一步涉及无线通信技术领域中一种基于数据补偿的到达时间差tdoa(time difference of arrival)定位方法。本发明可用于针对发射连续信号的非合作辐射源,特别是关于基于数据补偿tdoa定位方法。
背景技术:
2.随着移动通信技术的迅速发展,电磁频谱信号源定位技术已经成为下一代移动通信系统所必须具备的功能。近年来,研究结果表明,由于电磁频谱监测工作多是对信号的被动无源监测,无法实现对被监测目标的控制,因此监测目标和监测节点之间无法实现严格时钟同步。而tdoa定位方法只要求实现监测节点之间的时钟同步,可适用于蜂窝网、无线传感器网络等多种类型网络。且该定位方法由于应用成本低、定位精度较高,因而受到广泛关注,并在3gpp中被确定为一种标准的定位方法。
3.tdoa定位方法由两个步骤组成:一、估计无线电信号在空中的传播时间延迟差;二、采用该时延差计算目标节点的位置。时间延迟差简称时延差,即tdoa,是指由于被监测目标所发射无线电信号到达不同监测节点的传播距离不同,不同监测节点所接收到的同源信号之间的时间差。时间延迟差估计是指利用参数估计和信号处理的理论和方法,根据所接收到的监测信号,准确、快速地估计出不同监测节点之间由于监测信号传播路径不同而引起的时间延迟差。由此进一步确定其他相关的目标参量,例如目标节点的距离、方位角、运动方向和速度等。网络定位正是利用时间延迟差来计算目标节点和监测节点的距离差,因此准确、快速地估计时间延迟差是网络定位的前提。
4.时延差估计技术是近十多年来发展起来的新技术,其在实际工程中的应用引起了人们的极大的关注。在国外,时延差估计技术已在军事、地球物理、生物医学和工业过程的领域得到了广泛的应用。在国内,时延差估计技术也在被动定位和跟踪技术领域开始应用。目前可供选择的时间延迟差估计算法有多种,如:基本相关法,广义相关函数gcc法,广义相位谱法,自适应lms滤波器法等。
5.实际应用中,由于目标非合作、障碍物遮挡等原因,无法收到所有来自辐射源的信号,造成信号的丢失。而传统的观测量要求多个传感器节点都能收到同一段信号,信号的丢失会导致传统观测量减少,从而影响定位精度或无法定位。由于某些传感器节点的非共视不能接收到非合作辐射源的信号,导致该时刻非合作辐射源位置的丢失和测量数据利用率的下降。
技术实现要素:
6.本发明的目的在于针对上述现有技术存在的不足,提出了一种基于数据补偿的tdoa定位方法,旨在解决由于某些传感器节点的非共视不能接收到非合作辐射源的信号而导致该时刻非合作辐射源位置的丢失和测量数据利用率的下降的问题。
7.为实现上述目的的思路是,本发明针对不满足共视条件的时刻对其附近连续多个
时刻的同一对节点的到达时间差tdoa值进行多项式拟合——利用多项式拟合后的到达时间差tdoa值补充丢失时刻的tdoa值——将补充的tdoa值和实际测得的未能利用的tdoa值构建满秩测量方程,计算出丢失tdoa时刻非合作辐射源位置。该思路对非合作辐射源丢失的tdoa值进行补偿,从而求出丢失的非合作辐射源的位置。补充的tdoa值能够和实际测得的未能利用的tdoa值构建满秩测量方程,从而提高了测量数据的利用率。
8.本发明的技术方案包括如下步骤:
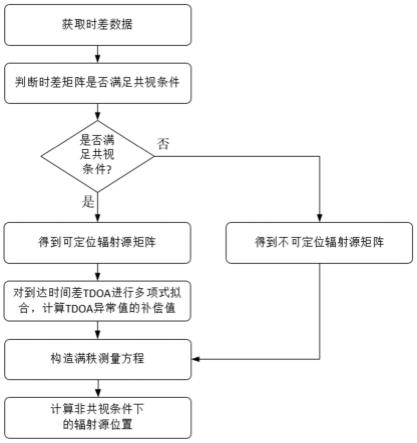
9.步骤1,获取时差数据:
10.步骤1.1,在m个传感器节点中任选1个节点作为主站,其他的节点作为辅站,其中,m≥4;
11.步骤1.2,利用到达时间差公式,计算待定位目标辐射的电磁波到达主站和其他每个辅站的到达时间差tdoa值;若由于辐射源信号在某个时刻到达主站或辅站的信号丢失导致tdoa值不可计算,则用一个不可能得到的tdoa异常值10s来表示;
12.步骤1.3,将所有到达时间差tdoa值生成一个时差矩阵,该矩阵的行数代表传感器的总数
–
1,列数代表时刻的总数,每一个元素值代表对应时刻的相应传感器节点对所测得的tdoa值;
13.步骤2,生成不可定位辐射源矩阵:
14.将时差矩阵中满足共视条件的时刻作为可定位辐射源矩阵;不满足共视条件的时刻作为不可定位辐射源矩阵;
15.步骤3,拟合tdoa值:
16.步骤3.1,针对不满足共视条件的时刻对其附近连续多个时刻的同一对节点的到达时间差tdoa值进行多项式拟合;
17.步骤3.2,将时差矩阵中异常值所在行除异常值之外的每一时刻值与其对应时刻的tdoa值,输入到matlab多项式拟合函数中,得到拟合后的tdoa值;
18.步骤4,利用下式,计算每个时刻的tdoa异常值的补偿值:
[0019][0020]
其中,tdoak表示第k个时刻的tdoa补偿值,tdoa
k-1
表示第k-1个时刻的tdoa值,tdoan表示第n个时刻的tdoa值,n>k;
[0021]
步骤5,计算非共视时刻下的辐射源的位置:
[0022]
将tdoa补偿值与不可定位辐射源矩阵中的tdoa值输入到满秩测量方程中计算辐射源的位置。
[0023]
本发明与现有技术相比,具有以下优点:
[0024]
第一,由于本发明针对不满足共视条件的时刻对其附近连续多个时刻的同一对节点的到达时间差tdoa值进行多项式拟合,利用多项式拟合后的到达时间差tdoa值补充丢失时刻的tdoa值,克服了现有技术非合作辐射源tdoa参数的丢失导致该时刻非合作辐射源位置的丢失的不足,使得本发明提高了非合作辐射源的定位率。
[0025]
第二,由于本发明补充的tdoa定位参数能够和实际测得的未能利用的tdoa值构建满秩测量方程,克服了现有技术非合作辐射源tdoa参数的丢失导致的测量数据利用率的下降的不足,使得本发明提高了非合作辐射源的tdoa利用率,从而使我们补偿得到的丢失时
刻非合作辐射源位置更精确。
附图说明
[0026]
图1是本发明的流程图;
[0027]
图2为本发明tdoa参数丢失率为0.2时的目标真实轨迹、原始定位结果和补充丢失点后的结果图;
[0028]
图3为本发明tdoa参数不同丢失率下的未补偿轨迹定位率、有参数时刻进行轨迹补偿定位率和和无参数时刻补偿轨迹定位率的变化趋势图;
[0029]
图4为本发明tdoa参数丢失率为0.2时补充丢失点后的轨迹与真实轨迹的rmse和中断固定定位结果与真实轨迹的rmse结果图。
具体实施方式
[0030]
下面结合附图和实施例对本发明作进一步的描述。
[0031]
参照图1,对本发明实施例的实现步骤作进一步的描述。
[0032]
步骤1,获取时差数据
[0033]
步骤1.1,在m个传感器节点中任选1个节点作为主站,其他的节点作为辅站,其中,m≥4;
[0034]
步骤1.2,利用到达时间差公式,计算在不同时刻待定位目标辐射的电磁波到达主站和其他每个辅站的到达时间差tdoa值;若由于辐射源信号在某个时刻到达主站或辅站的信号丢失导致tdoa值不可计算,则用一个不可能得到的tdoa异常值10s来表示;
[0035]
步骤1.3,将所有到达时间差tdoa值生成一个时差矩阵,该矩阵的行数代表传感器的总数-1,列数代表时刻的总数,每一个元素值代表对应时刻的相应传感器节点对所测得的tdoa值;
[0036]
所述的到达时间差公式如下:
[0037][0038][0039]
其中,t
i1
表示待定位目标辐射的电磁波到达主站与第i个辅站的时间差tdoa值,i=2,...,m,r
i1
表示非合作辐射源到达第i个辅站主站点之间的距离差,c表示光的传播速度,||
·
||表示欧几里得范数操作,(
·
)0表示括号中内容的真实值,u表示非合作辐射源的位置,si表示第i个辅站的位置,ni1表示第i个辅站与主站之间距离差的零均值的高斯白噪声。
[0040]
具体操作步骤举例如下:首先选取三维空间中的4个传感器节点,以第1个节点作为主站,其他的节点作为辅站。然后利用步骤1.2所述到达时间差公式计算得到连续6个时刻的t
21
、t
31
、t
41
,不可计算的tdoa用tdoa异常值10s来表示,最后生成一个时差矩阵:
[0041][0042]
t
i1
表示待定位目标辐射的电磁波到达主站与第i个辅站的时间差tdoa值,i=2,...,4,t
i1
k表示第k个时刻的t
i1
值,k=1,...,6。
[0043]
步骤2,将时差矩阵中满足共视条件的时刻作为可定位辐射源矩阵;不满足共视条件的时刻作为不可定位辐射源矩阵;
[0044]
所述共视条件是基于tdoa参数的定位方法要求在同一时刻多个观测站必须同时接收到辐射源的信号。在二维空间中,两个或两个以上的tdoa可以确定辐射源的位置,在三维空间中,三个或三个以上的tdoa可以确定辐射源的位置;可定位辐射源矩阵中存放的是tdoa正常值;不可定位辐射源矩阵中存放的是tdoa正常值和异常值。
[0045]
具体操作步骤举例如下:观察时差矩阵发现第2、5时刻存在tdoa异常值,导致第2、5时刻的辐射源不满足共视条件,得到可定位辐射源和不可定位辐射源矩阵:
[0046][0047]
步骤3,对tdoa值进行多项式拟合。
[0048]
将时差矩阵中异常值所在行除异常值之外的每一时刻值与其对应时刻的tdoa值,输入到matlab多项式拟合函数中,得到拟合后的tdoa值;
[0049]
所述多项式拟合是用一个多项式展开去拟合包含数个分析格点的一小块分析区域
[0050]
中的所有观测点,展开系数用最小二乘拟合确定,其数学表达式为:
[0051][0052]
其中,m为多项式的最高次数,m的取值小于输入样本的总数,x表示时刻值,ωj表示多项式的系数,y表示输入时刻值后得到的与其对应时刻的tdoa值。
[0053]
具体操作步骤举例如下:
[0054]
将1、2、3、4、6和t
21
1、t
21
2、t
21
3、t
21
4、t
21
6输入到matlab多项式拟合函数中得到拟合后的tdoa值:将1、3、4、5、6和t
31 1、t
31 3、t
31 4、t
31 5、t
31 6输入到matlab多项式拟合函数中得到拟合后的tdoa值:入到matlab多项式拟合函数中得到拟合后的tdoa值:
[0055]
步骤4,利用下式,计算每个时刻的tdoa异常值的补偿值:
[0056][0057]
其中,tdoak表示第k个时刻的tdoa补偿值,tdoa
k-1
表示第k-1个时刻的tdoa值,tdoan表示第n个时刻的tdoa值,n>k。
[0058]
具体操作步骤举例如下:因为第2、5时刻存在异常值所以其补偿值计算结果如下:
[0059][0060][0061]
步骤5,计算非共视条件下的辐射源的位置。
[0062]
将tdoa补偿值与不可定位辐射源矩阵中的tdoa值输入到满秩测量方程中计算辐射源的位置。
[0063]
因为在二维空间中,两个或两个以上的tdoa可以确定辐射源的位置;在三维空间中,三个或三个以上的tdoa可以确定辐射源的位置。所述满秩测量方程指的是测量方程系
数线性无关且能够解出辐射源的位置。基于tdoa的经典定位计算方法分为两类,一类是可以求出解析解的算法,如fang算法、chan算法;另一类是迭代算法,如taylor算法;这里我们采用chan算法。
[0064]
下面结合仿真实验对本发明的效果做进一步的说明。
[0065]
1.仿真实验条件:
[0066]
本发明的仿真实验的硬件平台为:处理器为amd ryzen 75800h with radeon graphics,主频为3.20ghz,内存16.0gb。
[0067]
本发明的仿真实验的软件平台为:windows 11操作系统和matlab r2021b。
[0068]
本发明仿真实验场景是由单个飞机机动目标和四个传感器节点组成。单个飞机机动目标在飞行的起始时刻至第10个时刻为匀速直线运动,速度为100m/s。自第11个时刻至第15个时刻为正弦运动,其幅度为200m。自第16个时刻至第30个时刻为匀速直线运动,其速度为100m/s。在每一时刻中均包含大小为randn(1)*sqrt(r),r=10^2m的位置误差。将四个传感器节点分别设置在二维直角坐标系中的坐标点为[0,0]、[1000,250]、[5000,0]、[5000,5000]的位置。
[0069]
2.仿真内容及其结果分析:
[0070]
本发明仿真实验以位于[0,0]传感器节点为参考节点,计算每个时刻单个飞机机动目标信号到达其它三个传感器节点和参考节点之间的到达时间差,将所有到达时间差组成一个3*30的矩阵,矩阵的行数为:传感器的总数
–
1,列数为时刻的总数,每一列存放的是当前时刻的tdoa,包含大小为50ns的tdoa测量误差。之后用chan算法计算单个飞机机动目标的轨迹。对tdoa矩阵的第一行元素设置0.2的丢失率,由于tdoa矩阵中tdoa的丢失导致tdoa矩阵不满秩,从而无法给出定位结果,造成一些时刻单个飞机机动目标位置无法定位,再用chan算法计算出有单个飞机机动目标位置丢失的轨迹。利用本发明方法对有tdoa丢失的时刻进行补偿,将补偿后的tdoa与该时刻的tdoa测量值进行重组,并运用chan定位算法,获取该时刻目标的估计值。
[0071]
图2是当tdoa丢失率为0.2时的仿真结果图。图2中以方框标示的曲线代表真实轨迹曲线;以三角标示的曲线代表原始定位结果曲线;圆圈标示的曲线代表补充丢失点后的轨迹曲线。图2中的横轴和纵轴分别代表单个飞机目标在直角坐标系中的横纵坐标。其中在未对tdoa矩阵设置丢失率时,用chan算法,计算得到单个飞机目标的真实轨迹。在对tdoa矩阵设置丢失率为0.2时,再用chan算法,计算得到的单个飞机目标原始定位结果。利用本发明方法对有tdoa丢失的时刻进行补偿,将补偿后的tdoa与该时刻的tdoa测量值进行重组,并运用chan定位算法,获取该时刻目标的估计值,得到补充丢失点后的轨迹。
[0072]
图3是经过2000次蒙特卡洛循环后tdoa丢失率逐渐从0.1增大到0.5时得到的仿真结果图。图3中以方框标示的曲线代表未补偿轨迹定位率的曲线。以圆圈标示的曲线代表有参数时刻进行轨迹补偿定位率曲线。以三角标示的曲线代表无参数时刻补偿轨迹定位率曲线。图3中的横轴和纵轴分别代表tdoa的丢失率和单个飞机机动目标的定位率,在对tdoa矩阵设置不同的丢失率时得到的未补偿轨迹定位率曲线。对tdoa矩阵设置不同的丢失率,但只对有tdoa参数的时刻,采用本发明方法进行补偿得到有参数时刻进行轨迹补偿定位率曲线。对tdoa矩阵设置不同的丢失率,但对无tdoa参数时刻和有tdoa参数时刻,均采用本发明方法进行补偿,得到无参数时刻补偿轨迹定位率曲线。
[0073]
图4是经过2000次蒙特卡洛循环后得到丢失率为0.2时的均方根误差rmse(root mean square error)散点图。图4中以方框标示的散点代表采用本发明方法补充丢失点后的rmse,以圆圈标示的散点代表中断固定定位结果后的rmse。图4中的横轴和纵轴分别代表时刻和均方根误差。
[0074]
下面结合图2、图3、图4的仿真图对本发明的效果做进一步的描述
[0075]
由图2可以得出结论,在tdoa丢失率为0.2的条件下补充丢失点后的轨迹与原始定位结果相比其与真实轨迹的贴合程度更高。
[0076]
由图3可以得出结论,有参数时刻进行轨迹补偿定位率与未补偿轨迹定位率相比有大幅的提升,其中在丢失率为0.2时定位率提升了约0.15,在丢失率为0.5时提升了约0.22。
[0077]
由图4可以得出结论,补充丢失点后的rmse要比中断固定定位结果后的rmse平均低40m左右,说明所补充的丢失点具有不错的定位精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1