水下轴对称目标声源激发的海水表面波预报方法
本发明涉及水下目标探测,具体地涉及水下轴对称目标声源激发的海水表面波预报方法。
背景技术:
1、当从水中辐射的声信号入射到空气-海水界面时,同样会在此界面上激发出一种振幅微弱的扰动。在质点运动过程中,海水表面张力作用是其主要的恢复力,即水中辐射声波在海水-空气入射界面上会形成一种表面波,通常称之为海水表面波。显然,该表面波和在海水-海底界面传播的scholte波一样,是由水中目标辐射噪声入射至两种不同性质的界面上所致,同样携带着水下目标声源的信息。
2、水下目标航行产生的辐射噪声由连续谱和线谱组成,相较于连续谱,线谱主要集中在低频段,这有利于激发并检测由水下复杂声源辐射噪声激发的海水表面波;采用光学探测手段,可以对幅值较小的海水表面波进行检测,并从中解调出水下目标声源信息,继而发展成为一种新的水下目标探测方法。因此,从水下声源激发的海水表面波中获取有关水下目标的信息,有望为水下目标探测、对潜通信等提供一种新的技术路径,即“声-激光”联合探测。现有技术中,对于水下目标辐射噪声激发的海水表面波的建模研究中,常规做法是将复杂的水下目标视为一个点声源,而后在此基础上进行仿真计算、特性研究、应用预报等。现有技术的缺陷在于:
3、1.由于水下目标辐射噪声激发的海水表面波能量较弱,其作用距离相比低频声源的波长而言较小,此外由于实际水下目标本身也不是点声源,因此按现有技术这种粗暴的将水下简化为一个点声源显然是一个基础性的理论漏洞,必须将水下目标视为体积声源。因此,现有技术将体积声源视为点声源显然是不合理的,其理论基础本身就有缺陷,从而势必导致由此产生的结果的不准确性;
4、2.由于许多水下目标结构外层均为壳体,且大都可以简化为简单的三维轴对称结构,而三维轴对称结构可以采用二维对称模型进行分析,但现有技术尚无此类研究,更没有相关技术方案,因此在这一个领域实际上是一个真空。
技术实现思路
1、本发明针对上述问题,提供水下轴对称目标声源激发的海水表面波预报方法,其目的在于扭转现有技术以点声源代替实际的水下目标(体积)声源这一基础性缺陷,修正现有技术所必然会发生的不准确结果的理论基础,极大地提高预报准确性,填补现有的技术空白。
2、为解决上述问题,本发明提供的技术方案为:
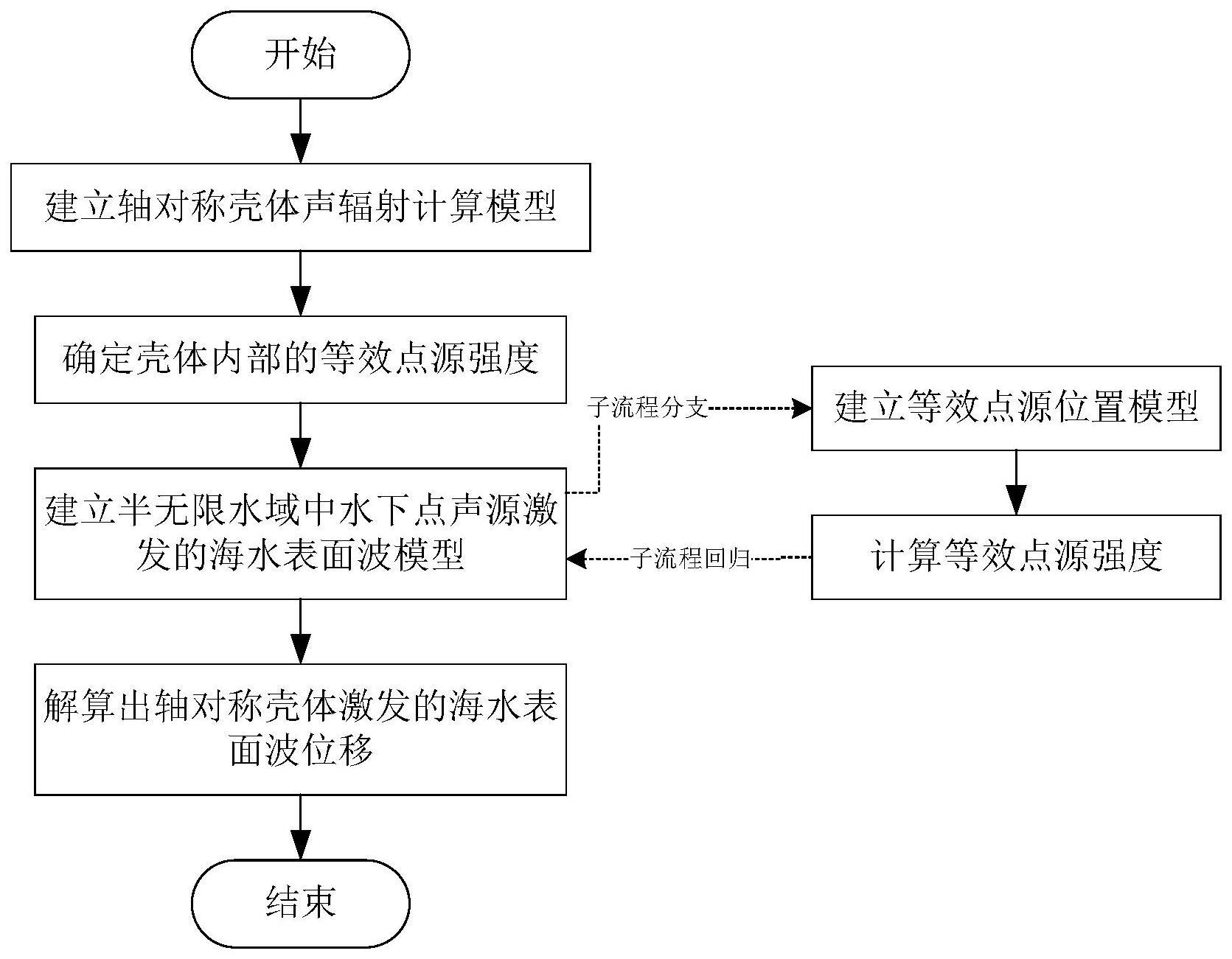
3、一种水下轴对称目标声源激发的海水表面波预报方法,包含以下步骤:
4、s100.建立轴对称壳体声辐射计算模型;
5、s200.确定壳体内部的等效点源强度;
6、s300.建立半无限水域中水下点声源激发的海水表面波模型;
7、s400.解算出轴对称壳体激发的海水表面波位移;所述轴对称壳体激发的海水表面波位移即为本发明的最终结果。
8、优选地,s100中所述轴对称壳体声辐射计算模型的壳体结构的坐标参数建立在轴对称坐标系下,其中轴对称结构目标关于z轴对称,激振力也关于z轴对称。
9、优选地,s100中所述轴对称壳体声辐射计算模型按下式表达:
10、-ω2asu-iνbsu+csu=fe+fp
11、其中:ω为角频率;i为单位虚数;ν为阻尼系数;u为壳体的表面法向位移,按下式表达:
12、
13、其中:qr为对应于第r个振动模态dr的幅值;q为由qr构成的列向量;d为由所述振动模态dr构成的矩阵;
14、as为相应的模态质量矩阵,按下式表达:
15、as=dtmsd
16、其中:dt为d的转置矩阵,其中上角标t表示矩阵转置;ms为结构的质量矩阵;
17、bs为相应的模态阻尼矩阵,按下式表达:
18、bs=dtcsd
19、其中:cs为结构的阻尼矩阵;
20、cs为相应的模态刚度矩阵,按下式表达:
21、cs=dtksd
22、其中:ks为结构的刚度矩阵;
23、fe为模态外力矩阵,按下式表达:
24、fe=dtfe
25、其中:fe为施加在结构表面的外部激振力;
26、fp为模态声压力矩阵,按下式表达:
27、fp=dtfp
28、其中:fp为流体施加在结构表面的声压力。
29、优选地,s200具体包含以下步骤:
30、s210.建立等效点源位置模型;
31、s220.计算等效点源强度。
32、优选地,s210中所述等效点源位置模型按下式表达:
33、
34、其中:p(rsi)为结构表面的声压;m为等效点源的数目,单位为个;rsi为第i个结构表面轮廓点对应的位置矢量;rol为第l个等效点源的位置矢量;α(rol)为第l个等效点源对应的强度;g(rsi,rol)为对应的格林函数,按下式表达:
35、
36、其中:kf为水中波数,按下式表达:
37、kf=ω/cf
38、cf为海水中声速;γ为海面反射系数;r'为结构表面节点到等效点源的水平距离;doi为等效点源到海面距离;zol为等效点源表面节点z方向的坐标;zsi为结构表面节点z方向的坐标。
39、优选地,s220中所述等效点源强度按下式表达:
40、(-ω2as-iνbs+cs-dtg)hα=fe
41、其中:hα按下式表达:
42、u=hα。
43、优选地,s300中所述半无限水域中水下点声源激发的海水表面波模型按下式表达:
44、
45、其中:η为波高,按下式表达:
46、z=η(r)
47、θ为声波入射角;υ为衰减系数,按下式表达:
48、
49、其中:μ为海水粘度;k为海水表面波的波数;g为重力加速度;t为海水的表面张力;
50、pi为入射声波,按下式表达:
51、pi+pr=0
52、其中:pr为反射声波。
53、优选地,s400中解算出所述轴对称壳体激发的海水表面波位移,按下式表达:
54、η总=ηα
55、其中:η总为采用所述轴对称壳体声辐射计算模型计算每个等效点源对应的强度以后,代入所述半无限水域中水下点声源激发的海水表面波模型中获取每个对应的表面波幅值,并进行线性叠加的总和;η为各个等效点源位置对应的表面波幅值η所对应的列向量。
56、优选地,s300中在海水表面张力作用下,表面动力学边界条件按下式表达:
57、
58、其中:为速度势函数,按下式表达:
59、
60、其中:m(z)为与z相关的函数。
61、优选地,s300中所述入射声波与所述反射声波满足条件,按下式表达:
62、
63、其中:vi为所述入射声波的振速;vr为所述反射声波的振速。
64、本发明与现有技术对比,具有以下优点:
65、1.由于本发明的理论基础就是将水下目标作为体积声源,在此基础之上发展出相应的技术方案,从而从根本上扭转了现有技术以点声源代替实际体积声源这一基础性缺陷,修正了现有技术所必然会发生不准确结果的理论基础,极大地提高了预报准确性;
66、2.由于本发明为预报由水下复杂目标声源激发的海水表面波提供了一种新的技术路径,即给出水下轴对称目标(以壳体为例)声源激发的海水表面波预报方法,从而填补了现有技术的技术空白,即以不同的技术路径实现了高于现有技术的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!