一种酱料灌装生产线上脱落金属碎片的检测方法与流程
1.本发明涉及酱料灌装生产线技术领域,具体为一种酱料灌装生产线上脱落金属碎片的检测方法。
背景技术:
2.酱是以豆类、小麦粉、水果、肉类或鱼虾等物为主要原料,加工而成的糊状调味品。它起源于中国,有着悠久的历史。中国人常见的调味酱分为以小麦粉为主要原料的甜面酱,和以豆类为主要原料的豆瓣酱两大类;还发展还有肉酱、鱼酱和果酱等调味品。随着酱制作工艺的进步,后来制酱之法也用于烹制其他非佐料菜肴,逐渐发展出一种烹调菜肴的方法,酱料在生产加工的过程中需要将酱料灌装到酱料瓶中。
3.但是现在灌装酱料瓶不透明,酱料也不透明,由于灌装设备的转速高、生产效率高,灌装生产线的机械摩擦部分以及齿轮传递部分,有摩擦掉落的金属碎片混入酱料瓶中的情况,已有的检测设备和方法效率低,不能快速检测,不适应高速生产线,检测误差大。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种酱料灌装生产线上脱落金属碎片的检测方法。
6.(二)技术方案
7.为实现上述目的,本发明提供如下技术方案:一种酱料灌装生产线上脱落金属碎片的检测方法,包括以下步骤:
8.s1、布置固态激光检测雷达
9.在灌装生产线的输送装置上,布置多组固态激光雷达,针对灌装生产线上快速移动的酱料瓶进行激光检测,利用固态激光雷达的flash技术,在激光点云中检测反射强的异常点云部分,并测量异常点云形状的大小和位置。
10.s2、构建恒虚警算法模型
11.采用基于随机采样的恒虚警算法进行固态激光雷达动目标检测,基于随机采样的恒虚警算法即利用根据蒙特卡洛原理,对固态激光雷达数据处理过程中的二维距离-多普勒矩阵(rdm)进行随机采样以模拟蒙特卡洛独立随机实验得到未知特征量估计的过程,通过对随机采样的样本点处理得到当前时刻目标背景噪声的估计,利用噪声估计值得到目标判决门限最终实现当前动目标检测。
12.s3、布置毫米波雷达
13.在金属灌装设备上,布置多组毫米波雷达,针对高速运转有摩擦的金属灌装设备部分,利用毫米波雷达监测摩擦和易损金属设备外形的变化,来判断是否掉落金属碎片。
14.s4、构建毫米波雷达算法模型
15.将测向区域在水平方向划分为n份,垂直方向划分为m份,得到m
×
n个网格,依次分
析雷达发射单元所发射的信号投射至测向区域的各个网格处的强度变化并得到传播函数h1,并分析各个网格所产生的回波信号传播至r个雷达接收单元的强度变化并得到回波函数h2,设定包含与q个雷达发射单元相对应的q个控制函数的控制矩阵a,并根据控制矩阵a对q个雷达发射单元所发射的信号分别进行控制,使q个雷达发射单元发射出投射至测向区域的发射信号,采用r个雷达接收单元对从测向区域返回的回波信号进行接收,获得r个雷达接收单元分别接收到的回波信号及该回波信号形成的回波矩阵y,根据传播函数h1、回波函数h2、控制矩阵a以及回波矩阵y计算得到测向区域的各个网格的反射系数。
16.s5、计算出毫米波雷达检测结果
17.对计算得到的网格的反射系数进行反推得到以m
×
n矩阵表示的反射系数矩阵x,依次判断反射系数矩阵x中的各个反射系数是否大于预定阈值,当大于时则判定对应的网格的相对应方向上存在障碍物。
18.s6、检测结果鉴定
19.利用新的融合算法,将两种雷达检测的检测数据进行对比,来检测两种雷达检测结果是否匹配,包括摩擦掉落金属外形大小是否吻合,金属碎片掉落的位置是否匹配。
20.优选的,所述s1中多组固态激光雷达,分别安装在输送装置的两侧,输送装置两侧的固态激光雷达的检测方向聚集在输送带上酱料瓶所处位置。
21.优选的,所述s2中构建基于随机采样的恒虚警算法模型,并确定基于随机采样的恒虚警算法的参数,利用基于确定参数对整个雷达检测的区域进行随机采样,并确定雷达检测的背景噪声估计值以及决策门限,进行雷达多目标检测。
22.优选的,所述恒虚警算法的参数包括采样点和门限因子,确定基于随机采样的恒虚警算法的参数包括采用蒙特卡罗方法确定采样点以及门限因子的值。
23.优选的,所述s4中传播函数h1的获得方法为分析推演法,包括如下步骤:
24.1)在测向区域与发射雷达之间设定一个与发射雷达单元所在平面相平行的模拟物面并将该模拟物面划分为m
×
n个网格。
25.2)采用雷达发射单元向模拟物面发射测试信号,并采用模拟信号接收雷达在模拟物面处进行接收,从而获得测试信号发送并传播到达模拟物面后的实际信号。
26.优选的,所述测试信号以及实际信号的强度关系进行模拟推演,得到传播函数h1。
27.优选的,所述s4中控制矩阵a中的q个控制函数分别对q个雷达发射单元的发射信号进行调幅、调频以及调相,使q个雷达发射单元发射出发射信号。
28.优选的,所述构建的基于随机采样的恒虚警算法模型确定雷达检测的背景噪声估计值和门限因子并确定决策门限。
29.(三)有益效果
30.与现有技术相比,本发明提供了一种酱料灌装生产线上脱落金属碎片的检测方法,具备以下有益效果:
31.该一种酱料灌装生产线上脱落金属碎片的检测方法,通过针对灌装生产线上快速移动的酱料瓶,利用固态激光雷达的flash技术,在激光点云中检测反射强的异常点云部分,并测量异常点云形状的大小和位置,而针对高速运转有摩擦的金属灌装设备部分,利用毫米波雷达监测摩擦和易损金属设备外形的变化,来判断是否掉落金属碎片,通过利用融合算法,来检测两种雷达检测结果是否匹配,包括摩擦掉落金属外形大小是否吻合,金属碎
片掉落的位置是否匹配,可以及时发现灌装设备的故障,剔除混入金属碎片的酱料瓶,避免对人体的伤害,具有现实意义和经济效益。
附图说明
32.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
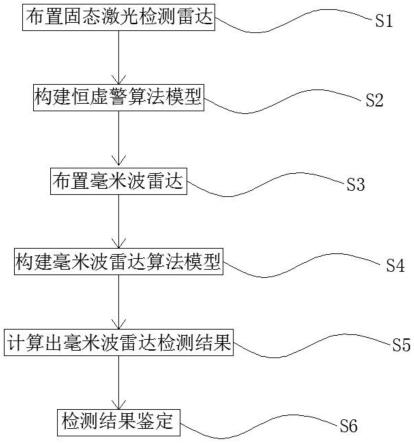
33.图1为本发明流程示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
35.所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
36.如图1所示,本发明提供了一种酱料灌装生产线上脱落金属碎片的检测方法,包括以下步骤:
37.s1、布置固态激光检测雷达
38.在灌装生产线的输送装置上,布置多组固态激光雷达,针对灌装生产线上快速移动的酱料瓶进行激光检测,利用固态激光雷达的flash技术,在激光点云中检测反射强的异常点云部分,并测量异常点云形状的大小和位置,其中多组固态激光雷达,分别安装在输送装置的两侧,输送装置两侧的固态激光雷达的检测方向聚集在输送带上酱料瓶所处位置。
39.s2、构建恒虚警算法模型
40.采用基于随机采样的恒虚警算法进行固态激光雷达动目标检测,基于随机采样的恒虚警算法即利用根据蒙特卡洛原理,对固态激光雷达数据处理过程中的二维距离-多普勒矩阵(rdm)进行随机采样以模拟蒙特卡洛独立随机实验得到未知特征量估计的过程,通过对随机采样的样本点处理得到当前时刻目标背景噪声的估计,利用噪声估计值得到目标判决门限最终实现当前动目标检测,构建基于随机采样的恒虚警算法模型,并确定基于随机采样的恒虚警算法的参数,利用基于确定参数对整个雷达检测的区域进行随机采样,并确定雷达检测的背景噪声估计值以及决策门限,进行雷达多目标检测。
41.恒虚警算法的参数包括采样点和门限因子,确定基于随机采样的恒虚警算法的参数包括采用蒙特卡罗方法确定采样点以及门限因子的值,构建的基于随机采样的恒虚警算法模型确定雷达检测的背景噪声估计值和门限因子并确定决策门限。
42.s3、布置毫米波雷达
43.在金属灌装设备上,布置多组毫米波雷达,针对高速运转有摩擦的金属灌装设备部分,利用毫米波雷达监测摩擦和易损金属设备外形的变化,来判断是否掉落金属碎片。
44.s4、构建毫米波雷达算法模型
45.将测向区域在水平方向划分为n份,垂直方向划分为m份,得到m
×
n个网格,依次分析雷达发射单元所发射的信号投射至测向区域的各个网格处的强度变化并得到传播函数h1,并分析各个网格所产生的回波信号传播至r个雷达接收单元的强度变化并得到回波函
数h2,设定包含与q个雷达发射单元相对应的q个控制函数的控制矩阵a,并根据控制矩阵a对q个雷达发射单元所发射的信号分别进行控制,使q个雷达发射单元发射出投射至测向区域的发射信号,采用r个雷达接收单元对从测向区域返回的回波信号进行接收,获得r个雷达接收单元分别接收到的回波信号及该回波信号形成的回波矩阵y,根据传播函数h1、回波函数h2、控制矩阵a以及回波矩阵y计算得到测向区域的各个网格的反射系数。
46.传播函数h1的获得方法为分析推演法,包括如下步骤:
47.1)在测向区域与发射雷达之间设定一个与发射雷达单元所在平面相平行的模拟物面并将该模拟物面划分为m
×
n个网格。
48.2)采用雷达发射单元向模拟物面发射测试信号,并采用模拟信号接收雷达在模拟物面处进行接收,从而获得测试信号发送并传播到达模拟物面后的实际信号。
49.根据测试信号以及实际信号的强度关系进行模拟推演,得到传播函数h1,控制矩阵a中的q个控制函数分别对q个雷达发射单元的发射信号进行调幅、调频以及调相,使q个雷达发射单元发射出发射信号。
50.s5、计算出毫米波雷达检测结果
51.对计算得到的网格的反射系数进行反推得到以m
×
n矩阵表示的反射系数矩阵x,依次判断反射系数矩阵x中的各个反射系数是否大于预定阈值,当大于时则判定对应的网格的相对应方向上存在障碍物。
52.s6、检测结果鉴定
53.利用新的融合算法,将两种雷达检测的检测数据进行对比,来检测两种雷达检测结果是否匹配,包括摩擦掉落金属外形大小是否吻合,金属碎片掉落的位置是否匹配。
54.下面具体说一下该一种酱料灌装生产线上脱落金属碎片的检测方法的工作原理。
55.通过针对灌装生产线上快速移动的酱料瓶,利用固态激光雷达的flash技术,在激光点云中检测反射强的异常点云部分,并测量异常点云形状的大小和位置,而针对高速运转有摩擦的金属灌装设备部分,利用毫米波雷达监测摩擦和易损金属设备外形的变化,来判断是否掉落金属碎片,通过利用融合算法,来检测两种雷达检测结果是否匹配,包括摩擦掉落金属外形大小是否吻合,金属碎片掉落的位置是否匹配,可以及时发现灌装设备的故障,剔除混入金属碎片的酱料瓶,避免对人体的伤害,具有现实意义和经济效益。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1