一种基于空间网格多空域飞行航路自动生成的方法与流程
1.本发明涉及民用航空电子领域,具体是涉及一种基于空间网格多空域飞行航路自动生成的方法。
背景技术:
2.民航搜救滞空时间比较长,搜救活动空域一般不止一个,经常有两到三个搜救活动空域。在搜救任务计划制作过程中,多空域活动搜救任务的制作过程直接影响到空域任务计划制作的效率及其精确性,其中对多空域飞行航路的规划和是空域活动任务的核心,所以对多空域飞行航路进行快速、精确的生成,对提高空域任务计划制作的高效性和精确性是极其必要的。
3.现有的空域飞行航路规划存在如下问题:(1)只能支持单空域活动任务航线的辅助生成,当需要制作多空域活动任务时,需要手工绘制第二个及后续的空域航线,效率不高;(2)按照空域活动时间和指定到达空域时刻等参数,手工绘制飞行航线,误差教大。由于存在的这些问题,现有的空域飞行航路规划在空域任务计划制作中的应用有限,是约束空域任务计划的制作效率和精确性的重要因素。
4.随着网格化技术的发展,现有技术中涌现大量通过对空域进行离散网格从而完成航路的管理与规划等技术方案。例如:专利申请号为cn201310423817.5公开了基于改进蚁群算法的终端区进离场航线网络三维优化方法以及申请号为cn202010261753.3公开了一种基于a*算法的同区域多条无碰撞航线规划方法。但是此类应用网格技术的方案主要基于如何避免飞行冲突进行航路规划,并没有将网格技术在空域任务计划制作中的进行应用从而获取更有效率与更高精确性的飞行航路规划。
技术实现要素:
5.发明目的:本发明提供一种基于空间网格多空域飞行航路自动生成的方法,利用“空间网格”区、线、道、点要素,制定出满足空域活动时间和指定到达空域时刻等条件下多个空域内以及多个空域之间的飞行航空规划,有效的提高多空域飞行航路规划的效率和精确性。
6.技术方案:本发明提供一种基于空间网格多空域飞行航路自动生成的方法,具体包括:(1)对全球空域进行空间网格划分,选择飞行器待活动的空域位置;统计待活动空域的总数量并设定空域活动顺序;针对每个待活动空域设定空域内飞行器的飞行时间与指定到达时刻,且在每个空域两端分别设置一基本点作为圆心点;(2)根据当前飞行器的飞行速度、飞行器的转弯坡度、空域活动方法、空域两端圆心点之间的距离、在轨活动时间、空域活动轨迹的平均飞行时长获取当前活动空域内飞行器的飞行轨迹及当前活动空域退出点时刻;(3)判断下一顺序活动空域是否成立;若不成立,则针对当前活动空
域、下一顺序活动空域获取对应空域内所有网格的网格原点,获取两个空域间距离最短的两个网格原点作为当前活动空域退出点与下一顺序活动空域进入点;根据该空域退出点、空域进入点生成两个空域之间沿基准网格线飞行的最短飞行航路与对应飞行距离;若成立,则转至步骤(7);所述基准网格线为空间网格划分过程中形成的网格线;(4)根据当前活动空域退出点时刻和下一顺序活动空域的指定到达时刻计算获得两个空域之间的飞行器飞行间隔时间;(5)根据飞行间隔时间和飞行距离计算两个空域之间飞行器的飞行速度并判断是否处于预设速度区间范围;若处于预设速度区间范围内,则转至步骤(7);若小于预设最小速度,则调整当前活动空域退出点与下一顺序活动空域进入点使得两个空域之间飞行器的飞行速度满足预设速度区间;若大于预设最大速度,调整下一顺序活动空域的指定到达时刻;(6)令,判断更新后的是否成立;若成立,则转至步骤(7),若不成立则转至步骤(2);(7)整合所有飞行器活动过的空域与相邻顺序活动空域之间的飞行轨迹生成多空域飞行航路。
7.进一步的,步骤(2)具体包括以下步骤:(2.1)根据当前飞行器的飞行速度、飞行器的转弯坡度计算转弯半径,具体公式为:;式中,为转弯半径,为当前飞行速度,为重力加速度,为转弯坡度;(2.2)空域两端圆心点中一端圆心点的坐标为,另一端圆心点的坐标为;计算当前活动空域内飞行轨迹关键点以生成飞行轨迹,飞行轨迹关键点包括转弯起点与转弯改平点,计算公式分别为:,,,;式中,圆心点对应的转弯起点坐标为、转弯改平点坐标为;圆心点对应的转弯起点坐标为、转弯改平点坐标为;为圆心点至圆心点的航向角;(2.3)通过空域两端圆心点之间的距离、转弯半径、在轨活动时间以及空域活动轨迹的平均飞行时长获取飞行器在当前活动空域沿空域内飞行轨迹的飞行次数;(2.4)计算当前活动空域退出点时刻,公式为:;式中,为当前
活动空域退出点时刻;为进入当前活动空域的时刻;当前活动空域内的飞行时间。
8.进一步的,步骤(5)中,若飞行速度小于预设最小速度,采用消磨时间法替换重新调整当前活动空域退出点与下一顺序活动空域进入点使得两个空域之间飞行器的飞行速度满足预设速度区间;所述采用消磨时间法具体为:若满足,则按照飞行,计算飞行器到达下一顺序活动空域待盘旋消磨时间,根据选择靠近空域进入点的区域作为可盘旋消磨的网格区,于可盘旋消磨的网格区盘旋至下一顺序活动空域指定到达时刻于下一顺序活动空域进入点进入。
9.进一步的,步骤(2)中所述空域活动方法包括双180跑道形、八字形、蛇形。
10.进一步的,步骤(1)中空间网格划分包括:将全球空域划分为,共24个第一层网格,针对每个第一层网格继续划分为,共96个网格第二层网格。
11.此外,本发明还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
12.有益效果:本发明所述一种基于空间网格多空域飞行航路自动生成的方法相对于现有技术,其显著优点是:通过对空域进行网格划分,通过网格原点与基准网格线确定每个空域的退出点、进入点,并结合预设飞行速度区间辅助生成符合飞行要求的空域间的飞行航路;通过在空域两端设置基本点,结合空域活动方法获取空域内的轨迹关键点,基于设定的空域活动时间自动生成空域内飞行轨迹;最终整合所有空域与所有空域间的飞行轨迹生成的多空域飞行航路能够提高多空域搜救活动等任务航线规划的效率和精确性。
附图说明
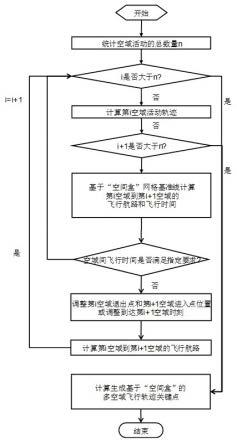
13.图1所示为本发明所述方法的流程图。
14.图2所示为利用本发明所述方法生成的空域活动轨迹示意图。
具体实施方式
15.下面结合附图对本发明的技术方案进一步说明。
16.如图1所示,本发明提供一种基于空间网格多空域飞行航路自动生成的方法,具体包括:步骤一、对全球空域进行空间网格划分,具体的划分包括:先将全球空域划分为,共24个第一层网格作为基本层,针对每个第一层网格继续划分为,共96个网格第二层网格。
17.基于划分的网格选择飞行器待活动的空域位置,统计飞行器待活动空域总数量,并设定空域活动顺序;针对每个待活动空域设定空域内飞行器的飞行时间与指定到
达时刻,且在每个空域两端分别设置一搜索基本点作为圆心点。
18.步骤二、获取当前活动空域,内飞行器的的飞行轨迹。具体包括以下步骤:(1)根据飞行器的当前飞行速度、飞行器的转弯坡度计算转弯半径,具体公式为:;式中,为转弯半径,为当前飞行速度,单位为米/秒;为重力加速度,单位为米/秒2;为转弯坡度,单位为弧度。
19.(2)根据转弯半径、空域两端圆心并结合空域活动方法确定空域活动轨迹的关键点,即转弯起点与转弯改平点;依据该飞行轨迹的关键点可自动生成空域内的飞行轨迹。空域活动方法包括双180跑道形、八字形、蛇形,本实施例以空域活动方法为双180跑道形。约定正北为y轴正方向,正东为x轴的正方向;当前活动空域两端圆心点中一端圆心点的坐标为,另一端圆心点的坐标为;计算当前活动空域内转弯起点与转弯改平点,计算公式分别为:,,,;式中,圆心点对应的转弯起点坐标为、转弯改平点坐标为;圆心点对应的转弯起点坐标为、转弯改平点坐标为;为圆心点至圆心点的航向角。
20.(3)通过空域两端圆心点之间的距离、转弯半径、在轨活动时间以及空域活动轨迹的平均飞行时长获取飞行器在当前活动空域沿空域内飞行轨迹的飞行次数。
21.(4)计算空域退出点时刻,公式为:;式中,为当前活动空域退出点时刻;为进入当前活动空域的时刻;当前活动空域内的飞行时间。
22.步骤三、判断当前空域是否成立,若不成立,获取飞行器于当前活动空域与下一顺序活动空域之间的飞行轨迹;若成立则转至步骤七。
23.获取当前活动空域内所有网格的网格原点、下一顺序活动空域内所有网
格的网格原点,计算获取两个空域之间距离最短的两个网格原点分别作为当前活动空域退出点与下一顺序活动空域进入点。
24.根据该空域退出点、空域进入点结合空间网格的基准网格线生成两个空域之间沿基准网格线飞行的最短飞行航路与对应飞行距离。
25.步骤四、根据当前空域退出点时刻和下一顺序活动空域的指定到达时刻计算获得两个空域之间的间隔时间;公式为:。
26.步骤五、根据两个空域之间的飞行间隔时间和飞行距离计算两个空域之间飞行器的飞行速度并判断是否满足预设速度区间;;若满足则按照飞机按最小时速飞行,计算飞行器到达下一顺序活动空域待盘旋消磨时间;从当前活动空域到达到下一顺序活动空域时刻:;飞机按最小时速飞行,提前到达下一顺序活动空域需要盘旋消磨时间:。
27.根据选择靠近空域进入点的区域作为可盘旋消磨的网格区,飞机于可盘旋消磨的网格区进行盘旋消耗时间;或者获取两个空域所在网格区的所有网格原点,基于基准网格线,调整设置当前活动空域退出点与下一顺序活动空域进入点,重新计算飞行航路使得满足飞行速度;其中,进行调整的当前活动空域退出点与下一顺序活动空域进入点均需为网格原点。
28.若满足,则按照飞行,调整下一顺序活动空域的指定到达时刻:;若满足,则执行下一步骤。
29.步骤六、令,判断更新后的是否成立;若成立,则转至步骤七,若不成立则转至步骤二。
30.步骤七、整合飞行器所有活动过的空域与相邻顺序活动空域之间的飞行轨迹生成多空域飞行航路。
31.如图2所示,空域活动方法设置为双180跑道形时,于1号空域与2号空域以及1号空域与2号空域之间的飞行轨迹。
32.该飞行轨迹结果验证了利用本发明所述方法能够生成满足空域活动时间和指定到达空域时刻等条件下多个空域内以及多个空域之间的飞行航空规划。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1