一种配对齿轮齿数差比啮合角测量装置的制作方法
1.本实用新型涉及一种配对齿轮测量装置,尤其涉及一种配对齿轮齿数差比啮合角测量装置。
背景技术:
2.配对齿轮的齿数差和齿数比对于齿轮的传动比的计算至关重要,对于采用标准中心距安装的直齿轮而言,由于此时的节圆和分度圆互相重合,故此时的节圆压力角和分度圆压力角和啮合角均相等,而当两直齿轮的实际中心距与标准中心距不等时,其啮合角不在与分度圆压力角相等,而与实际中心距密切相关,而传统的测量直齿轮啮合角的装置大多结构简单,操作复杂,需要人工观察相关的数据再经过数学计算才能够得到啮合角,从而使得测量工作效率低下,突出了其不足之处。
技术实现要素:
3.本实用新型的目的在于提供一种配对齿轮齿数差比啮合角测量装置,以解决上述技术问题。
4.为实现上述目的本实用新型采用以下技术方案:
5.一种配对齿轮齿数差比啮合角测量装置,包括主体、显示屏、控制按钮、电池仓、支撑臂、支撑轴、双向测距传感器、中旋钮、齿轮、主燕尾导轨、限位板、左滑动架、右滑动架、副燕尾导轨、测量部分,所述主体左部安装有显示屏,且中部安装有多个控制按钮,所述主体右部设有电池仓,且内部设有控制模块,所述主体后端固定有水平的支撑臂,所述支撑臂后部转动连接有竖直的支撑轴,且前部固定有水平的双向测距传感器,所述支撑轴上部同轴固定有中旋钮,且底部同轴固定有齿轮,所述主体后端左右两部各固定有水平的主燕尾导轨,且左右两部各固定有限位板,两所述限位板分别与主燕尾导轨的末端相固定,所述主体左部通过主燕尾导轨滑动连接有水平的左滑动架,且右部通过主燕尾导轨滑动连接有水平的右滑动架,所述左滑动架和右滑动架前部各固定有水平的副燕尾导轨,所述左滑动架和右滑动架共同安装有测量部分。
6.在上述技术方案基础上,所述测量部分包括左滑板、左测距传感器、左光杆、左齿条、右滑板、右测距传感器、右光杆、右齿条、左螺杆、左旋钮、右螺杆、右旋钮、右压缩弹簧、左压缩弹簧、指示箭头、一号摄像头、二号摄像头、三号摄像头、四号摄像头,所述左滑动架通过副燕尾导轨滑动连接有水平的左滑板,且右端从后至前依次固定有水平的左测距传感器、左光杆和左齿条,所述右滑动架通过副燕尾导轨滑动连接有水平的右滑板,且左端从后至前依次固定有水平的右测距传感器、右齿条和右光杆,所述左滑板前部转动连接有水平的左螺杆,所述左螺杆左端同轴固定有左旋钮,所述右滑板右部转动连接有水平的右螺杆,所述右螺杆右端同轴固定有右旋钮,所述左齿条与右光杆相滑动连接,且右端固定有水平的右压缩弹簧,所述右齿条与左光杆相滑动连接,且左端固定有水平的左压缩弹簧,所述左滑板、左滑动架、右滑动架和右滑板顶端中部分别固定有指示箭头,所述左滑板、左滑动架、
右滑动架和右滑板底端中部依次固定有竖直的一号摄像头、二号摄像头、三号摄像头和四号摄像头。
7.在上述技术方案基础上,所述双向测距传感器能够测量到左滑动架和右滑动架之间的距离,所述左滑板通过手动旋转左螺杆能够沿着左滑动架前部的副燕尾导轨左右滑动,所述左测距传感器能够测量到左滑板右端的水平距离,所述左齿条和右齿条相较于支撑轴呈中心对称设置,所述左齿条和右齿条分别与齿轮相啮合,所述右滑板通过手动旋转右螺杆能够沿着右滑动架前部的副燕尾导轨左右滑动,所述右压缩弹簧的右端与右滑动架的左端相固定,所述左压缩弹簧的左端与左滑动架的右端相固定,所述齿轮在转动时能够使得左齿条和右齿条相互远离和相互靠近,所述左齿条和右齿条在左压缩弹簧和右压缩弹簧的弹性斥力作用下具有相互远离的趋势。
8.与现有技术相比,本实用新型具有以下优点:本实用新型可以相对移动的左滑板和左滑动架以及右滑板和右滑动架配合左测距传感器和右测距传感器能够对两轴的直径进行自动测量,而在左压缩弹簧和右压缩弹簧的弹性斥力作用下具有相互远离趋势的左滑动架和右滑动架配合双向测距传感器能够对两轴外壁之间的最短距离进行测量,继而配合测到的直径对两齿轮的实际中心距进行自动推算,而利用一号摄像头、二号摄像头、三号摄像头和四号摄像头可以对下方的齿轮进行自动识别和标记,从而计算两齿轮的齿数,继而提高测量效率。
附图说明
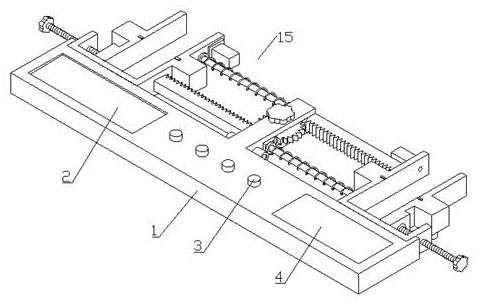
9.图1为本实用新型的结构示意图。
10.图2为本实用新型底部的结构示意图。
11.图3为本实用新型左齿条和右齿条与齿轮的啮合示意图。
12.图中:1、主体,2、显示屏,3、控制按钮,4、电池仓,5、支撑臂,6、支撑轴,7、双向测距传感器,8、中旋钮,9、齿轮,10、主燕尾导轨,11、限位板,12、左滑动架,13、右滑动架,14、副燕尾导轨,15、测量部分,16、左滑板,17、左测距传感器,18、左光杆,19、左齿条,20、右滑板,21、右测距传感器,22、右光杆,23、右齿条,24、左螺杆,25、左旋钮,26、右螺杆,27、右旋钮,28、右压缩弹簧,29、左压缩弹簧,30、指示箭头,31、一号摄像头,32、二号摄像头,33、三号摄像头,34、四号摄像头。
具体实施方式
13.下面结合附图和具体实施例对本实用新型作进一步详细阐述。
14.如图1-3所示,一种配对齿轮齿数差比啮合角测量装置,包括主体1、显示屏2、控制按钮3、电池仓4、支撑臂5、支撑轴6、双向测距传感器7、中旋钮8、齿轮9、主燕尾导轨10、限位板11、左滑动架12、右滑动架13、副燕尾导轨14、测量部分15,所述主体1左部安装有显示屏2,且中部安装有多个控制按钮3,所述主体1右部设有电池仓4,且内部设有控制模块,所述主体1后端固定有水平的支撑臂5,所述支撑臂5后部转动连接有竖直的支撑轴6,且前部固定有水平的双向测距传感器7,所述双向测距传感器7用于对两轴外壁之间的最短距离进行测量,所述支撑轴6上部同轴固定有中旋钮8,且底部同轴固定有齿轮9,所述主体1后端左右两部各固定有水平的主燕尾导轨10,且左右两部各固定有限位板11,所述限位板11用于对
左滑动架12和右滑动架13的滑动范围进行限制,两所述限位板11分别与主燕尾导轨10的末端相固定,所述主体1左部通过主燕尾导轨10滑动连接有水平的左滑动架12,且右部通过主燕尾导轨10滑动连接有水平的右滑动架13,所述左滑动架12和右滑动架13前部各固定有水平的副燕尾导轨14,所述左滑动架12和右滑动架13共同安装有测量部分15。
15.所述测量部分15包括左滑板16、左测距传感器17、左光杆18、左齿条19、右滑板20、右测距传感器21、右光杆23、右齿条22、左螺杆24、左旋钮25、右螺杆26、右旋钮27、右压缩弹簧28、左压缩弹簧29、指示箭头30、一号摄像头31、二号摄像头32、三号摄像头33、四号摄像头34,所述左滑动架12通过副燕尾导轨14滑动连接有水平的左滑板16,且右端从后至前依次固定有水平的左测距传感器17、左光杆18和左齿条19,所述右滑动架13通过副燕尾导轨14滑动连接有水平的右滑板20,且左端从后至前依次固定有水平的右测距传感器21、右齿条22和右光杆23,所述右测距传感器21和左测距传感器17用于对被测齿轮所在轴的直径进行测量,所述左滑板16前部转动连接有水平的左螺杆24,所述左螺杆24左端同轴固定有左旋钮25,所述右滑板20右部转动连接有水平的右螺杆26,所述右螺杆26右端同轴固定有右旋钮27,所述左齿条19与右光杆23相滑动连接,且右端固定有水平的右压缩弹簧28,所述右齿条22与左光杆18相滑动连接,且左端固定有水平的左压缩弹簧29,所述左滑板16、左滑动架12、右滑动架13和右滑板20顶端中部分别固定有指示箭头30,所述左滑板16、左滑动架12、右滑动架13和右滑板20底端中部依次固定有竖直的一号摄像头31、二号摄像头32、三号摄像头33和四号摄像头34。
16.所述双向测距传感器7能够测量到左滑动架12和右滑动架13之间的距离,所述左滑板16通过手动旋转左螺杆24能够沿着左滑动架12前部的副燕尾导轨14左右滑动,所述左测距传感器17能够测量到左滑板16右端的水平距离,所述左齿条19和右齿条22相较于支撑轴6呈中心对称设置,所述左齿条19和右齿条22分别与齿轮9相啮合,所述右滑板20通过手动旋转右螺杆26能够沿着右滑动架13前部的副燕尾导轨14左右滑动,所述右压缩弹簧28的右端与右滑动架13的左端相固定,所述左压缩弹簧29的左端与左滑动架12的右端相固定,所述齿轮9在转动时能够使得左齿条19和右齿条22相互远离和相互靠近,所述左齿条19和右齿条22在左压缩弹簧29和右压缩弹簧28的弹性斥力作用下具有相互远离的趋势。
17.本实用新型的工作原理:使用时,先手动旋转左螺杆24和右螺杆26,使得左滑板16与左滑动架12之间的间距大于主动齿轮所在轴的直径,并使得右滑板20与右滑动架13之间的间距大于从动齿轮所在轴的直径,随后手动旋转中旋钮8,利用齿轮9与左齿条19和右齿条22的啮合对左滑板16、左滑动架12、右滑动架13和右滑板20的位置进行调整,使得主动齿轮所在轴位于左滑板16和左滑动架12之间,并使得从动齿轮所在轴位于右滑板20和右滑动架13之间,同时使得两轴的位置位于指示箭头30指向的位置,且使得一号摄像头31、二号摄像头32、三号摄像头33和四号摄像头34朝向主动齿轮和从动齿轮,然后松开中旋钮8,使得左滑动架12和右滑动架13在左压缩弹簧29和右压缩弹簧28的弹性斥力作用下与两轴的外壁相紧密接触,随后对左旋钮25和右旋钮27进行旋转,使得左滑板16和右滑板20分别与两轴外壁相紧密接触,此时通过控制按钮3即可利用一号摄像头31、二号摄像头32、三号摄像头33和四号摄像头34对下方的齿轮9进行自动识别和标记,从而计算各齿轮9的齿数,而左测距传感器17、双向测距传感器7和右测距传感器21所测量到的数据加上预先设置的矫正值即可得到主动齿轮所在轴的直径、两轴外壁之间的最短距离以及从动齿轮所在轴的直
径,从而能够推算出两齿轮9之间的实际中心距,然后经过控制模块的计算将压力角的数据和齿数差比的数据在显示屏2上进行展示。
18.以上所述为本实用新型较佳实施例,对于本领域的普通技术人员而言,根据本实用新型的教导,在不脱离本实用新型的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1