机器人的制作方法
1.本技术实施例涉及机器人技术领域,尤其涉及一种机器人。
背景技术:
2.随着移动机器人的广泛应用,对移动机器人的避障能力要求越来越高。识别和躲避各种障碍的能力直接决定了机器人的性能。全向移动的机器人需求随之变得尤为突出。
3.现有技术中,通过在机器人的前端设置雷达来探测机器人运行前方的障碍物,但是探测范围有限,无法适应全向移动机器人在除了前方之外的其他方向的避障需求。
技术实现要素:
4.本技术实施例提供一种机器人,可解决机器人由于探测范围有限,无法适应全向移动时的避障需求的问题。
5.本技术实施例一方面提供了一种机器人,包括:底盘和传感器系统,所述传感器系统包括设置于所述底盘上的至少两个视觉传感器,所述至少两个视觉传感器分别以不同的姿态角安装于所述底盘,所述至少两个视觉传感器在水平方向的覆盖视场角大于90度。
6.可选地,所述至少两个视觉传感器包括:
7.第一视觉传感器;
8.所述第一视觉传感器以第一姿态角安装在所述底盘的第一侧面,所述第一视觉传感器在水平方向的覆盖视场角大于90度。
9.可选地,所述传感器系统还包括第一视觉传感器安装平台,所述第一视觉传感器安装平台包括第一固定部和第一外展部;
10.所述第一固定部固定设置在所述底盘的第一侧面的后部,且与所述底盘有第一夹角,所述第一夹角为第一预设角度的锐角;
11.所述第一外展部与所述第一固定部连接,且所述第一外展部在所述机器人的移动平面的投影位于所述底盘在所述移动平面的投影的外侧,所述第一外展部的安装面与所述第一固定部具有第一固定夹角,所述第一固定夹角为第二预设角度的钝角;
12.所述第一视觉传感器固定安装在所述第一外展部的安装面上,所述第一视觉传感器的视场的第一边界面与所述底盘的第一侧面平行。
13.可选地,所述至少两个视觉传感器包括:第二视觉传感器;所述第二视觉传感器以第二姿态角安装在所述底盘的第二侧面,所述第二视觉传感器在所述底盘的第二侧面的水平方向的覆盖视场角大于90度。
14.可选地,所述传感器系统还包括第二视觉传感器安装平台,所述第二视觉传感器安装平台包括第二固定部和第二外展部;
15.所述第二固定部固定设置在所述底盘的第二侧面的后部,且与所述底盘有第一夹角,所述第一夹角为第一预设角度的锐角;
16.所述第二外展部与所述第二固定部连接,且所述第二外展部在所述机器人的移动
平面的投影位于所述底盘在所述移动平面的投影的外侧,所述第二外展部的安装面与所述第二固定部具有第一固定夹角;
17.所述第二视觉传感器固定安装在所述第二外展部的安装面上。
18.可选地,所述至少两个视觉传感器包括:第三视觉传感器;所述第三视觉传感器以第三姿态角安装在所述底盘的前端。
19.可选地,所述传感器系统还包括第三视觉传感器安装平台;所述第三视觉传感器安装平台设置在所述底盘前端的前沿,且与所述底盘有第二夹角,所述第二夹角为第三预设角度的锐角;所述第三视觉传感器安装在所述第三视觉传感器安装平台上,且所述第三视觉传感器的正面与所述第三视觉传感器安装平台成所述第二夹角;所述第三视觉传感器的视场高于所述机器人运行平面预设高度。
20.可选地,所述机器人的包括设置在所述底盘的底面的全方向移动轮模组,所述全方向移动轮模组用于控制所述机器人向前方、左方或右方移动。
21.可选地,所述全方向移动轮模组包括驱动轮模组,所述驱动轮模组设置在所述底盘的底面,用于控制所述机器人的移动方向。
22.可选地,所述全方向移动轮模组还包括两个万向轮模组,所述两个万向轮模组分别设置在所述驱动轮模组的左右两侧,用于平衡移动中的所述机器人。
23.从上述本技术各实施例可知,机器人包括底盘和传感器系统,该传感器系统包括设置于该底盘上的至少两个视觉传感器,该至少两个视觉传感器分别以不同的姿态角安装于该底盘,该至少两个视觉传感器在水平方向的覆盖视场角大于90度,该至少两个视觉传感器的视场范围覆盖该底盘的各移动方向,可以实现对各移动方向上障碍物的探测,提高避障能力,且各视觉传感器的视场角决定了视场范围不与机器人发生干涉,不受机器人的影响,提高探测障碍物的准确性,使机器人能够各种复杂环境行走更加顺畅,提高了机器人的安全可靠性。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
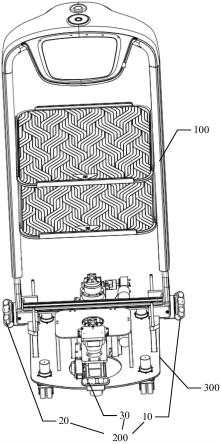
25.图1为本技术实施例提供的机器人的结构示意图;
26.图2为本技术实施例提供的机器人的底盘和视觉传感器结构正视图;
27.图3为本技术实施例提供的机器人顶部的视场示意图;
28.图4为本技术实施例提供的机器人侧面的视场示意图;
29.图5为本技术实施例提供的机器人正上视图的视场示意图;
30.图6为本技术实施例提供的机器人后视图的视场示意图。
具体实施方式
31.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是
本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.参见图1,本技术实施例提供了一种机器人100,用于在全向移动时识别环境中的障碍物。该机器人包括传感器系统200和底盘300:
33.传感器系统200包括设置在机器人的底盘300上不同位置的至少两个视觉传感器,该至少两个视觉传感器分别以不同的姿态角安装在底盘300上,其中,姿态角是指视觉传感器安装在底盘300上之后,相对于底盘300的夹角和视觉方向,至少两个视觉传感器在水平方向的覆盖视场角大于90度,该至少两个视觉传感器的视场角覆盖底盘300的至少两个方向,例如,视觉传感器可以是三个,覆盖了底盘300的方位具体为前方、左方和右方,其中前方是指机器人运动时正面所对的方向。
34.机器人除了底盘300,还包括本体,机器人的本体固定在底盘300上,底盘300在地平面上投影的面积大于该本体在地平面上投影的面积,当至少两个视觉传感器在水平方向的覆盖视场角大于90度时,视觉传感器的视场范围不与底盘300发生干涉,则必然不与机器人本体发生干涉,也即不与机器人100发生干涉,其中,视场范围不与底盘、机器人本体、机器人发生干涉,是指底盘、机器人本体和机器人的任何部位均不在视场范围内。
35.本技术实施例中,机器人包括底盘和传感器系统,该传感器系统包括设置于该底盘上的至少两个视觉传感器,该两个视觉传感器分别以不同的姿态角安装于该底盘上,该至少两个视觉传感器在水平方向的覆盖视场角大于90度,该至少两个视觉传感器的视场范围覆盖该底盘的多个方向,可以实现对底盘多个方向上障碍物的探测,提高避障能力,且各视觉传感器视场角决定了视觉传感器的视场范围不与机器人发生干涉,不受机器人的影响,提高探测障碍物的准确性,使机器人能够各种复杂环境行走更加顺畅,提高了机器人的安全可靠性。
36.参见图2,图2为机器人的底盘和视觉传感器结构正视图。
37.该至少两个视觉传感器可包括:第一视觉传感器10、第二视觉传感器20和第三视觉传感器30。
38.参见图3-图6,其中,图3和图4分别为机器人顶部和侧面的视场示意图,图5和图6分别为机器人正上视图和后视图的视场示意图。图3-图6中,a区为第一视觉传感器10的视场范围、b区域为第二视觉传感器20的视场范围,c区域为第三视觉传感器30的视场范围。
39.第一视觉传感器10以第一姿态角安装在底盘300的第一侧面,第一视觉传感器10在该第一侧面的水平方向的覆盖视场角大于90度,则第一视觉传感器10的视场范围与底盘300的第一侧面的表面不发生干涉。
40.传感器系统100还包括第一视觉传感器安装平台11,第一视觉传感器安装平台包括第一固定部111和第一外展部112;
41.第一固定部111固定设置在底盘300的第一侧面的后部,且与底盘300有有第一夹角,该有第一夹角为第一预设角度的锐角;
42.第一外展部112与第一固定部111连接,且第一外展部112悬于底盘300之外,即,第一外展部112在机器人100的移动平面上的投影位于底盘300在该移动平面上的投影的外侧,与底盘300的该投影没有重合的部分。
43.第一外展部112的安装面与第一固定部111具有第一固定夹角,该第一固定夹角为第二预设角度的钝角;
44.第一视觉传感器10固定安装在第一外展部112的安装面上,第一视觉传感器10的背面可螺接在第一外展部112的安装面上。
45.第一视觉传感器10的视场范围的第一边界面与底盘300的第一侧面的平行。具体如图3所示,安装在底盘300左侧的第一视觉传感器10的视场范围a的第一边界面(即与底盘300的左侧的表面相邻的边界面),与底盘300的左侧的表面平行,而不发生干涉,该第一边界面为视场范围a中最靠近底盘300的左侧的表面,可见,视场范围a不与底盘300发生干涉。
46.第二视觉传感器20以第二姿态角安装在底盘300的第二侧面,第二视觉传感器20在该第二侧面的水平方向的覆盖视场角大于90度,则第二视觉传感器20的视场范围与底盘300的第二侧的表面不发生干涉。
47.传感器系统100还包括第二视觉传感器安装平台21,第二视觉传感器安装平台包括第二固定部211和第二外展部212;
48.第二固定部211设置在底盘300的第二侧面的后部,且与底盘300有该第一夹角,该第一夹角为该第一预设角度的锐角;
49.第二外展部212与第二固定部211连接,且第二外展部212悬于底盘300之外,即,第二外展部212在机器人100的移动平面上的投影位于底盘300在该移动平面上的投影的外侧,与底盘300的该投影没有重合的部分。
50.第二外展部212的安装面与第二固定部211具有该第一固定夹角。
51.第二视觉传感器20固定安装在第二外展部212的安装面上,第二视觉传感器20的背面可螺接在第二外展部212的安装面上。
52.第二视觉传感器20的视场的第一边界面与底盘300的第二侧的平行。
53.具体如图3所示,安装在底盘300右侧的第二视觉传感器20的视场范围b的第一边界面(即与底盘300的右侧的表面相邻的边界面),与底盘300的右侧的表面平行,而不发生干涉,该第一边界面为视场范围b中最靠近底盘300的右侧的表面,可见,视场范围b不与底盘300发生干涉。
54.第三视觉传感器30以第三姿态角安装在底盘300的前端,第三视觉传感器30的视场范围为机器人200移动前方的斜上方。
55.传感器系统200还包括第三视觉传感器安装平台31;
56.第三视觉传感器安装平台31设置在底盘300前端的前沿,且与底盘300有第二夹角,该第二夹角为第三预设角度的锐角;
57.第三视觉传感器30安装在第三视觉传感器安装平台31上,且第三视觉传感器30的正面与第三视觉传感器安装平台31成该第二夹角;
58.第三视觉传感器30的视场高于机器人100运行平面预设高度,该预设高度低于环境中的障碍物的高度,使得位于底盘300前端的第三视觉传感器30能够探测到障碍物。障碍物的高度可以是高度最小障碍物的高度。
59.其中,第一固定部111设置在底盘300的第一侧面的后部,第二固定部211设置在底盘300的第二侧面的后部,第三视觉传感器30以第三姿态角安装在底盘300的前端,第三视觉传感器安装平台31设置在底盘300前端的前沿等描述中的“前”和“后”,是以机器人运动
时正面所对的方向为标准,例如,如图1所示,图1的下端为机器人运动时的前方。此时第三视觉传感器30相对于第一传感器10和第二传感器20在底盘300上的位置为“前”。
60.第一视觉传感器10、第二视觉传感器20和第三视觉传感器30具体可以为rgbd视觉传感器。
61.本技术实施例中的姿态角是指各视觉传感器相对于底盘300的上表面所形成的三维空间夹角,具体地,以底盘300的上表面建立xyz坐标系,该xyz坐标系的建立符合如下条件:xy轴构成的平面与底盘300的上表面重合,z轴与xy轴符合右手法则,xyz的正方向不作具体限定,则三维空间夹角包括各视觉传感器相对于该xyz坐标系中x、y、z轴方向的夹角。
62.上述各姿态角可以根据各视觉传感器与各自对应的视觉传感器安装平台的角度以及各安装平台与底盘的角度获得。
63.由于不同的视觉传感器视场角不同导致视场范围不同,因此根据视觉传感器各自的视场范围确定上述第一姿态角和第二姿态角,使得视场范围不与底盘300的第一侧面的表面和第二侧的表面发生干涉。
64.机器人100包括设置在底盘300的底面的全方向移动轮模组40,全方向移动轮模组40用于带动机器人100向前方、左方或右方移动。
65.全方向移动轮模组40包括驱动轮模组41和两个万向轮模组42;
66.驱动轮模组41设置在底盘300的底面,用于控制机器人100的移动方向;
67.两个万向轮模组42分别设置在驱动轮模组41的左右两侧,用于平衡移动中的机器人100。
68.本技术实施例中,在机器人底盘的第一侧面和第二侧面设置有第一视觉传感器和第二视觉传感器,第一视觉传感器在该第二侧面的水平方向的覆盖视场角大于90度,第二视觉传感器在该第二侧面的水平方向的覆盖视场角大于90度,第一视觉传感器的视场范围和第二视觉传感器的视场范围均与机器人不发生干涉,在机器人底盘的前端设置有第三视觉传感器,第三视觉传感器的视场范围为机器人移动前方的斜上方,第一视觉传感器、第二视觉传感器和第三视觉传感器的视场范围覆盖该底盘的左方、右方和前方等移动方向,可以实现对上述移动方向上障碍物的探测,提高避障能力,且各视觉传感器的视场范围不与机器人发生干涉,不受机器人的影响,提高探测障碍物的准确性。
69.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
70.以上为对本实用新型所提供的机器人的描述,对于本领域的技术人员,依据本实用新型实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1