仿生爪刺片平面力的测量装置
1.本实用新型涉及空间探测技术领域,特别涉及一种仿生爪刺片平面力的测量装置。
背景技术:
2.嫦娥五号成功从月球带回近1800克月壤回国,这对于我国科学家研究月球提供了材料,而未分化月岩岩心对于月球起源探究起关键性作用,近些年来,深空采样技术层出不穷,但都以破坏样本为代价,只能带回相关碎片与碎石,所采样品均为部分或全部分化的表面物质,钻取可以最大限度的保留样本的原态并且可以实现月表下1米甚至更深层的物质采样,而不仅仅是表面物质。仿生爪刺片为实现钻取这项任务提供了用于抵抗后坐力及扭转的抓附力。为实现这一钻取方式成功实施,需要进行大量的地面试验和仿真工作,为保证仿真结果真实可靠,仿生爪刺片的仿真和试验需要进行对标工作,这就要求在试验过程中记录下相关力的数据,为后续通过仿真来优化和调整仿生爪刺片提供支持。
技术实现要素:
3.针对上述问题,本实用新型的目的在于提供一种仿生爪刺片平面力的测量装置,该装置能准确测量仿生爪刺片竖直平面力的大小,本装置测试精度高、操作简便、采集数据准确有效。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.本实用新型提供一种仿生爪刺片平面力的测量装置,包括型材主架、二维移动平台、待测仿生爪刺片、横向拉力传感器及纵向拉力传感器,其中二维移动平台设置于型材主架上,二维移动平台具有沿横向和竖直方向移动的自由度;纵向拉力传感器设置于二维移动平台上,横向拉力传感器与纵向拉力传感器垂直连接,待测仿生爪刺片与横向拉力传感器连接;当待测仿生爪刺片抓附待测表面时,横向拉力传感器测量横向拉力,纵向拉力传感器测量竖直法向拉力。
6.所述待测仿生爪刺片设置于转接件ⅰ上,转接件ⅰ与所述横向拉力传感器的一端连接,所述横向拉力传感器的另一端通过转接件ⅱ与所述纵向拉力传感器的下端连接,所述纵向拉力传感器的上端通过转接件ⅲ与所述二维移动平台连接。
7.所述二维移动平台包括一号连接板、二号连接板、三号连接板、横向直线驱动机构及纵向直线驱动机构,其中一号连接板竖直设置,且左右两端与所述型材主架连接;横向直线驱动机构设置于一号连接板上,且输出端与二号连接板连接;纵向直线驱动机构设置于二号连接板上,且输出端与三号连接板连接,三号连接板与所述转接件ⅲ连接。
8.所述横向直线驱动机构包括依次连接的一号电机、一号联轴器及一号滚珠丝杠滑轨组,其中一号滚珠丝杠滑轨组沿横向设置于所述一号连接板上,一号滚珠丝杠滑轨组与所述二号连接板连接。
9.所述一号滚珠丝杠滑轨组包括一号滚珠丝杠及平行设置于一号滚珠丝杠两侧的
两个一号滑轨,一号滚珠丝杠的左右两端分别通过两个一号轴承座支撑,两个一号轴承座通过螺栓与所述一号连接板上设有的横向调整腰型孔连接;
10.所述二号连接板通过一号丝母与一号滚珠丝杠螺纹连接,且所述二号连接板与两个一号滑轨滑动连接。
11.所述纵向直线驱动机构包括依次连接的二号电机、二号联轴器及二号滚珠丝杠滑轨组,其中二号滚珠丝杠滑轨组沿竖直方向设置于所述二号连接板,二号滚珠丝杠滑轨组与所述三号连接板连接。
12.所述二号滚珠丝杠滑轨组包括二号滚珠丝杠及平行设置于二号滚珠丝杠一侧的二号滑轨,其中二号滚珠丝杠的上下端分别通过两个二号轴承座支撑,两个二号轴承座通过螺栓与所述二号连接板上设有的纵向调整腰型孔连接;
13.所述三号连接板通过二号丝母与所述二号滚珠丝杠螺纹连接,且所述三号连接板与二号滑轨滑动连接。
14.所述横向拉力传感器和所述纵向拉力传感器均采用s型拉力传感器。
15.本实用新型的优点与有益效果是:
16.1.本实用新型利用s型拉力传感器和滚珠丝杠滑轨组以及电机进行力的大小测量,测量精度在于s型拉力传感器的精度,因此在要求更高精度的测量力的数据,只需要更换相应精度与量程的s型或其它外形和型号的拉力传感器即可,而不仅仅局限于s型拉力传感器;
17.2.本实用新型的所有零部件除连接板、拉力传感器、转接件外,其它的均为标准件,互换性高,制造成本低;
18.3.本实用新型大大降低了测试的复杂程度,操作简单,容易准确的获取力数据;
19.4.本实用新型能够准确获取爪刺动态力参数。
附图说明
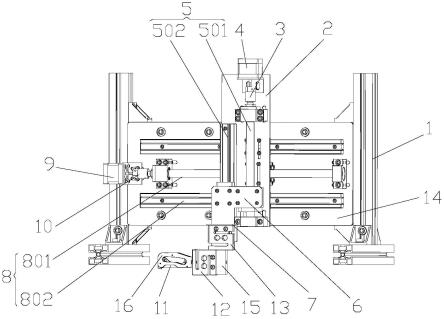
20.图1为本实用新型一种仿生爪刺片平面力的测量装置的轴测图;
21.图2为本实用新型中待测仿生爪刺片的模型图;
22.图3为本实用新型中s型拉力传感器的结构示意图;
23.图4为本实用新型中s型拉力传感器的电路原理图;
24.图中:1为型材主架,2为二号连接板,3为二号联轴器,4为二号电机,5为二号滚珠丝杠滑轨组,501为二号滚珠丝杠,502为二号滑轨,6为三号连接板,7为转接件ⅲ,8为一号滚珠丝杠滑轨组,801为一号滚珠丝杠,802为一号滑轨,9为一号电机,10为一号联轴器,11为待测仿生爪刺片,12为横向拉力传感器,13为纵向拉力传感器,14为一号连接板,15为转接件ⅱ,16为转接件ⅰ。
具体实施方式
25.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
26.如图1-3所示,本实用新型提供一种仿生爪刺片平面力的测量装置,包括型材主架1、二维移动平台、待测仿生爪刺片11、横向拉力传感器12及纵向拉力传感器13,其中二维移
动平台设置于型材主架1上,二维移动平台具有沿横向和竖直方向移动的自由度;纵向拉力传感器13设置于二维移动平台上,横向拉力传感器12与纵向拉力传感器13垂直连接,待测仿生爪刺片11与横向拉力传感器12连接;当待测仿生爪刺片11抓附待测表面时,横向拉力传感器12测量横向拉力,纵向拉力传感器13测量竖直法向拉力。
27.进一步地,待测仿生爪刺片11设置于转接件ⅰ16上,转接件ⅰ16与横向拉力传感器12的一端连接,横向拉力传感器12的另一端通过转接件ⅱ15与纵向拉力传感器13的下端连接,纵向拉力传感器13的上端通过转接件ⅲ7与二维移动平台连接。
28.如图1所示,本实用新型的实施例中,二维移动平台包括一号连接板14、二号连接板2、三号连接板6、横向直线驱动机构及纵向直线驱动机构,其中一号连接板14竖直设置,且左右两端通过角块、螺母等连接件与型材主架1连接;横向直线驱动机构设置于一号连接板14上,且输出端与二号连接板2连接;纵向直线驱动机构设置于二号连接板2上,且输出端与三号连接板6连接,三号连接板6与转接件ⅲ7连接。
29.本实施例中,横向直线驱动机构包括依次连接的一号电机9、一号联轴器10及一号滚珠丝杠滑轨组8,其中一号滚珠丝杠滑轨组8沿横向设置于一号连接板14上,一号滚珠丝杠滑轨组8与二号连接板2连接。
30.具体地,一号滚珠丝杠滑轨组8包括一号滚珠丝杠801及平行设置于一号滚珠丝杠801两侧的两个一号滑轨802,一号滚珠丝杠801的左右两端分别通过两个一号轴承座支撑,两个一号轴承座通过螺栓与一号连接板14上设有的横向调整腰型孔连接,一号滚珠丝杠801可以通过横向调整腰型孔在一定横向范围内自由调整位置并固定。二号连接板2通过一号丝母与一号滚珠丝杠801螺纹连接,且二号连接板2与两个一号滑轨802滑动连接。
31.本实施例中,纵向直线驱动机构包括依次连接的二号电机4、二号联轴器3及二号滚珠丝杠滑轨组5,其中二号滚珠丝杠滑轨组5沿竖直方向设置于二号连接板2,二号滚珠丝杠滑轨组5与三号连接板6连接。
32.具体地,二号滚珠丝杠滑轨组5包括二号滚珠丝杠501及平行设置于二号滚珠丝杠501一侧的二号滑轨502,其中二号滚珠丝杠501的上下端分别通过两个二号轴承座支撑,两个二号轴承座通过螺栓与二号连接板2上设有的纵向调整腰型孔连接;二号滚珠丝杠501可以通过纵向调整腰型孔在一定纵向范围内自由调整位置并固定。三号连接板6通过二号丝母与二号滚珠丝杠501螺纹连接,且三号连接板6与二号滑轨502滑动连接。本实施例中,一号电机9和二号电机4均采用42cm04电机。
33.如图3-4所示,本实施例中,横向拉力传感器12和纵向拉力传感器13均采用s型拉力传感器。横向拉力传感器12和纵向拉力传感器13基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在其表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。为保证相关数据的准确性,安装两个拉力传感器前需要对两个拉力传感器进行标定工作,标定工作为现有技术,在此不再赘述。
34.本实用新型提供的一种仿生爪刺片平面力的测量装置,其工作原理是:
35.待测仿生爪刺片11连接在横向拉力传感器12上,横向拉力传感器12通过转接件ⅱ15连接在纵向拉力传感器13上,两个拉力传感器呈垂直排布,其中横向拉力传感器12测量
横向拉力,纵向拉力传感器13测量竖直法向拉力;当待测仿生爪刺片11抓附待测表面时,两个s型拉力传感器因受到外力,内部电阻发生变化,从而使传感器两端电压电流发生变化,外部辅助电控装置根据实时的电压电流显示相应的实时数据并记录,从而可以以数字的形式显示待测力大小。本实用新型结构简单,易于组装,操作方便。
36.以上所述仅为本实用新型的实施方式,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1