多照相机三维捕获与重建系统
本发明涉及多照相机三维(3d)捕获和重建系统。
背景技术:
1、对于在建筑、考古、地质和基础设施领域中运行的许多现实,3d捕获和重建系统具有共通的实际问题,即,在诸如隧道、狭窄楼梯、阁楼、地下设施、地下墓穴、渡槽等的勘测环境中,经典技术在时间和成本方面不可持续。即,所有这些环境的特点是结构复杂,很少或没有照明,在长时间停留的情况下可能存在危险,并且最重要的是隧道形状,因此是宽度非常窄、高度很小但非常长的环境。市场几乎没有提供勘测这些环境的可能性;要找到足够灵活以在狭窄但又很长的环境中移动并且能够检测非常近的物体的仪器,确实很困难。
2、今天所有可能的测量技术,诸如动态捕获扫描仪系统,存在沿着主要测量方向的误差传播的问题,从而导致难以预测或控制并且常常不能在后处理中被校正的甚至显著的偏差。
3、出于这种原因,它们本身在度量方面并不可靠,需要支持、校正和验证测量,这些并不总是可能的,并且非常困难。
4、经典的测量技术需要捕获时间和在现场花费的时间,这在物理上或经济上通常是不可能的。收集非常冗余的数据(考虑到环境的形状)的需要也使得后处理边界可行。
技术实现思路
1、本发明的目的是,提供克服已知技术的缺点的多照相机3d捕获和重建系统。
2、另一目的是,提供特别设计用于小和狭窄环境的多照相机3d捕获和重建系统。
3、另一目的是,提供易于操作的系统。
4、根据本发明,这些目的以及其它目的通过多照相机三维捕获和重建系统实现,该多照相机三维捕获和重建系统包括:机械结构;被放置在所述结构上的至少五个照相机;其特征在于,所述至少五个照相机是各自使用鱼眼光学器件的照相机;所述至少五个照相机被配置为使得,与所述系统的向前方向相比:第一前照相机的光学器件指向0°±10°;第二右前照相机的光学器件指向+45°±10°;第三左前照相机的光学器件指向-45°±10°;第四右后照相机的光学器件指向60°±20°;第五左后照相机的光学器件指向-60°±20°;x定义所述第二右前照相机和所述第三左前照相机之间的距离,所述第三左前照相机与所述第五左后照相机之间的距离y等于或大于距离x,其中,x大于或等于10cm。
5、在从属权利要求中描述了本发明的其它特征。
6、与已知技术的解决方案相比,该解决方案的优点是多种多样的。
7、该系统允许对人工和自然密闭空间进行三维重建和摄影检查,以解决测量准确性和可重复性的问题。
8、它在包括高分辨率3d几何信息和完整摄影文档的需要360度数字化的情况下得到了自然的应用,这在数字信息领域越来越普遍和必要,并为建模(建筑信息建模-bim)、虚拟现实(vr)和增强现实(ar)体验以及“在线数据共享”的领域的开发开辟了可能性。
9、该系统被设计为由以正常步行速度穿过待勘测环境/隧道的单个操作员独立持有和使用,并允许在很短的时间内完成完全自动的捕获。或者,该系统可以被安装在推车上。
10、利用图像匹配原理、数字摄影测量规则、利用来自运动算法的结构和专门为参考应用类型设计的多照相机系统,该设备旨在成为市场上现代动态3d勘测系统的替代品,从而提供高精度的形状测量并以卓越的质量捕获图像,这是用于表面数字化和详细检查的最佳特性。
11、该设备使得能够限制长捕获期间漂移误差的传播。这是由于鱼眼光学器件的视角的组合利用:以使得除了操作员之外的整个场景始终被完整地拍摄的方式布置的至少五个照相机;摄影镜头的捕获的精确同步;照相机之间固定距离的精确校准;以及通过来自运动结构过程(structure from motion process)的数据处理。所有这些允许识别围绕结构的各方向上的大量关键点以及形成结构的一部分的照相机之间以及在移动期间结构本身的连续位置之间的图像(同源点)之间的大量约束。宽视角意味着,在相同的关键点不再落入照相机的视场内之前,它们可以被识别并且用作结构的大量连续位置中的约束(同源点)。这些约束的冗余减少长捕获中的漂移误差。
12、由于鱼眼光学系统的宽视角,该设备使得能够减少360°3d重建所需的图像数量,这允许通过使用仅仅五个照相机获得除操作员外的取景场景的完全覆盖。并且,该结构的宽视角使得能够获得大的约束冗余(连接结构的后续位置的同源点),同时允许拍摄基准和拍摄距离(bp/dp)之间的大比率,即,结构的两个连续位置的重心的距离与“结构的重心和拍摄表面之间的距离”之间的比率等于1:1,而相反,通过使用直投影光学器件,该比率必须更低(约1:2),从而显著增加所需图像的数量。
13、该设备使得能够通过利用校准照相机的固定相对位置和照相机的同步直接按比例获得重建,而不需要额外的支持测量。
14、它还使得即使对于非专业摄影测量师也可以实现快速的捕获;这也可以通过将结构安装在车辆上或以其它运动模式按完全自主的方式实现。
15、该设备使用全局快门式照相机,并且使用鱼眼镜头。
16、以不同的角度布置并且指向结构重心的外侧的具有视角190°(大于150°)的鱼眼光学器件允许对操作员以外的取景场景进行半球形拍摄,从而允许全向约束点,这些全向约束点同时使最终重建和在捕获时刻对设备的确定更加稳健;并且,减小的焦距有利于宽景深,这允许非常近的物体和远处的物体同时对焦,从而改善后续图像处理的结果。
17、照相机之间的相对布置,特别是照相机的拍摄中心之间的显著距离的存在,特别是沿着仪器的指向方向以及行走方向,允许同源点的精确三角测量和得到的三维重建的缩放。
18、即使在非常大的环境中,照相机之间的约束、固定和校准位置也允许实现自动和精确的尺寸标注(dimensioning)。
19、设备还是便携的并且重量轻,因此它可以被用在极端条件下。
20、可以通过使照相机更接近或者进一步分开,按比例增加仪器的尺寸,以使其更好地适应或多或少宽敞的环境,并且可以增加照相机的数量,如有必要,可以增加任何数量的照相机。
21、仪器可以长时间自主工作,因此,即使对于很长时间的拍摄,也可以很容易地将其安装在移动支架上,并且即使是非专业的摄影测量师也可以使用。
22、能够与诸如例如热感照相机的其它传感器集成,这些传感器有助于进一步改善精度和/或扩展获取的数据的类型。
23、还能够实时处理或预处理数据。
技术特征:
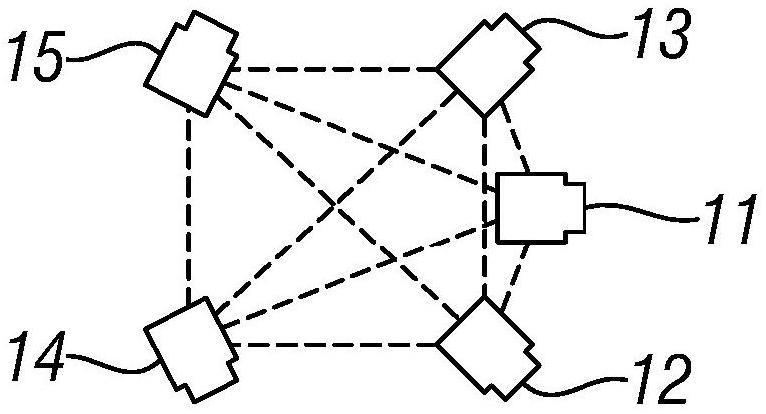
1.一种多照相机三维捕获和重建系统,包括:机械结构(10);被放置在所述结构(10)上的至少五个照相机(11~15);其特征在于,所述至少五个照相机(11~15)是各自使用鱼眼光学器件的照相机;所述至少五个照相机(11~15)被配置为使得,与所述系统的向前方向相比:第一前照相机(11)的光学器件指向0°±10°;第二右前照相机(12)的光学器件指向+45°±10°;第三左前照相机(13)的光学器件指向-45°±10°;第四右后照相机(14)的光学器件指向60°±20°;第五左后照相机(15)的光学器件指向-60°±20°;x定义所述第二右前照相机(12)和所述第三左前照相机(13)之间的距离,所述第三左前照相机(13)与所述第五左后照相机(15)之间的距离y等于或大于距离x,其中,x大于或等于10cm。
2.根据权利要求1所述的系统,其特征在于,所述至少五个照相机(11~15)被配置为使得,与穿过所述至少五个照相机(11~15)中的各照相机的垂直平面相比,它们以0°±20°的角度被放置。
3.根据权利要求1所述的系统,其特征在于,所述第二照相机(12)、所述第三照相机(13)、所述第四照相机(14)和所述第五照相机(15)基本上位于正方形的顶点上。
4.根据权利要求3所述的系统,其特征在于,所述第二照相机(12)和所述第四照相机(14)之间的距离y以及所述第三照相机(13)和所述第五照相机(15)之间的距离y在10cm和200cm之间。
5.根据权利要求1所述的系统,其特征在于,所述第二照相机(12)、所述第三照相机(13)、所述第四照相机(14)和所述第五照相机(15)基本上位于矩形的顶点上。
6.根据权利要求1所述的系统,其特征在于,所述第一照相机(11)、所述第二照相机(12)、所述第三照相机(13)、所述第四照相机(14)和所述第五照相机(15)基本上位于同一水平面内。
7.根据权利要求1所述的系统,其特征在于,与所述第二照相机(12)、所述第三照相机(13)、所述第四照相机(14)和所述第五照相机(15)相比,所述第一照相机(11)升高。
8.根据权利要求1所述的系统,其特征在于,所述至少五个照相机(11~15)使用全局快门类型的图像捕获方法。
9.根据权利要求1所述的系统,其特征在于,与所述第二照相机(12)和所述第三照相机(13)相比,所述第一照相机(11)处于更向前的位置。
10.根据权利要求1所述的系统,其特征在于,所述系统还包括便携的控制中心(20),便携的控制中心(20)包括电源电池(22)和计算机(21)。
11.根据权利要求1所述的系统,其特征在于,所述系统是便携的。
技术总结
一种多照相机三维捕获和重建系统,包括:机械结构(10);被放置在所述结构(10)上的至少五个照相机(11~15);其特征在于,所述至少五个照相机(11~15)是各自使用鱼眼光学器件的照相机;所述至少五个照相机(11~15)被配置为使得,与所述系统的向前方向相比:第一前照相机(11)的光学器件指向0°±10°;第二右前照相机(12)的光学器件指向+45°±10°;第三左前照相机(13)的光学器件指向‑45°±10°;第四右后照相机(14)的光学器件指向60°±20°;第五左后照相机(15)的光学器件指向‑60°±20°;x定义所述第二右前照相机(12)和所述第三左前照相机(13)之间的距离,所述第三左前照相机(13)与所述第五左后照相机(15)之间的距离y等于或大于距离x,其中,y大于或等于10cm。
技术研发人员:F·法西,L·佩尔费蒂,S·帕里
受保护的技术使用者:米兰综合工科大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!