用于受计算机辅助地估计用于车辆系统的总质量的值的系统和方法与流程
本发明从一种根据权利要求1的前序部分所述的用于受计算机辅助地估计或求取用于车辆系统的总质量的值的系统并且从一种根据权利要求10的前序部分所述的用于受计算机辅助地估计或求取用于车辆系统的总质量的值的方法出发。另外,本发明还从一种制动系统和/或车辆调节系统以及从一种车辆系统出发,该车辆系统包括牵引车辆并且必要时包括与牵引车辆耦合的至少一个挂车以及这样的制动系统和/或车辆调节系统。
背景技术:
1、制动和车辆调节系统需要尽可能准确的用于车辆系统的总质量的值,以便能够以期望的精度实施所涉及的调节系统。主要是在商用车中,总质量由于不同的装载量有时明显地波动,使得执行重复的质量确定,以便能够辅助制动系统和车辆调节系统。
2、在牵引车辆和可能耦接的挂车中对于每个单个的轴存在轴载荷传感器的情况,总车辆质量能够相对准确地被确定为轴载荷的和。然而,只有少量的牵引车辆和挂车在每个轴上都具有轴载荷传感器。通常,只在牵引车辆的通过空气弹簧波纹管减震的后轴上存在轴载荷传感器,其中,空气弹簧波纹管压力与轴载荷相关联。在完全钢减震的车辆的情况下,在大多数情况下不提供被测量的轴载荷。
3、因此,由于缺少在所有轴上的轴载荷传感器,很少能够实现直接的质量确定。取而代之地,经常估计车辆系统的总质量。de 103 07 511a1公开一种用于受计算机辅助地基于驱动力与由惯性力和驱动阻力组成的和之间的平衡关系来估计车辆的质量的方法。因此,质量能够例如通过同时检测驱动力矩(作用到车轮上的扭矩)和合成的加速度和/或将其推导出来估计。由于摩擦力通常不能准确地求取,因此,通常只能够逐步地通过多次测量来实现由这样的动态参量(即在不使用秤的情况下)准确地求取质量。因此,在给定的时间点存在对质量的或多或少的准确估计。该估计能够例如在使用所谓的rls(recursive-least-squares,递归最小二乘法)算法或rls估计器的情况下实现,其中,该估计通过对应的输入参量对估计器的激励来实现。为了实现对质量的尽可能可靠的估计,在较长的时间段内改进该估计。通过这种方式能够避免在当前的估计值方面的错误源或至少减小所述错误源的影响。这样的错误源例如由于在商用车的连续的静止状态时间的情况下斜坡位置的改变或由于未知的摩擦力(相对于道路、车辆的旋转部件、风等)而产生。
4、如果不告知估计器装载量已改变,则所估计的用于总质量的值将与实际的总质量不一致或在非常长的学习过程之后才一致。这可能导致对于车辆的行驶特性而言严重的后果。如果例如在装载变换之后导致下坡行驶(例如在驾驶员不实施加速的情况下),可能出现危急状况,因为还没有最佳地计算所需要的制动力。质量估计只能够逐渐地匹配于装载量改变,因为在估计器的记忆中始终仍然存在对于过时的装载量的测量值,新的输入值还未执行校正。驾驶员可能防备性地考虑该状况,但是对于自主驾驶的车辆而言,过时的质量值具有负面影响。
5、因此,需要另外的估计或求取车辆系统的总质量的可能性,其中,应当识别并考虑装载量的改变和与牵引车辆耦合的挂车的数量的改变,以便加速估计过程。
技术实现思路
1、因此,本发明的任务在于,提供一种用于受计算机辅助地估计或求取用于车辆系统的总质量的值的系统和方法,借助该系统和该方法能够更快速地进行估计过程或求取过程。
2、根据本发明,该任务通过权利要求1和权利要求10的特征来解决。
3、根据本发明的第一方面,提出一种用于受计算机辅助地估计或求取用于车辆系统的总质量的值的系统,该车辆系统包括牵引车辆并且必要时包括与牵引车辆耦合的至少一个挂车,其中,
4、a)所述系统具有传感器装置,所述传感器装置构造成使得其传感器信号代表所述车辆系统的状态数据,所述状态数据根据所述车辆系统的装载量并且根据与所述牵引车辆耦合的挂车的数量而改变,并且根据所述状态数据能够识别出:所述车辆系统的装载量和与所述牵引车辆耦合的挂车的数量在第一时间点(t1)与相对于所述第一时间点(t1)较晚的至少一个第二时间点(t2)之间已改变还是未改变,并且
5、b)所述系统具有评估装置,所述评估装置构造成使得所述评估装置尤其与所述状态数据无关地在第一时间点(t1)在第一估计或求取的框架中估计或求取用于所述车辆系统的总质量的第一值(w1),其中,
6、c)所述评估装置另外构造成使得所述评估装置能够根据所述状态数据识别出:所述车辆系统的装载量和与所述牵引车辆耦合的挂车的数量在所述第一时间点(t1)与所述至少一个第二时间点(t2)之间已改变还是未改变,并且
7、d)所述评估装置另外构造成使得:
8、-如果所述评估装置基于所述状态数据识别出在所述第一时间点(t1)与所述第二时间点(t2)之间所述车辆系统的装载量没有发生显著改变并且与所述牵引车辆耦合的挂车的数量也没有发生改变,则所述评估装置保留所述第一值(w1)作为用于所述车辆系统的总质量的有效值或者考虑所述第一值作为用于进一步求取或估计所述车辆系统的总质量的初始值,但是-如果所述评估装置基于所述状态数据识别出在所述第一时间点(t1)与所述第二时间点(t2)之间所述车辆系统的装载量已发生改变和/或与所述牵引车辆耦合的挂车的数量已发生改变,则所述评估装置在时间上在所述第一估计或求取之后的第二估计或求取的框架中尤其与所述状态数据无关地估计或求取用于所述车辆系统的总质量的第二值(w2)并且摒弃所述第一值(w1)。
9、根据本发明的第二方面,提出一种用于受计算机辅助地估计或求取用于车辆系统的总质量的值的方法,所述车辆系统包括牵引车辆并且必要时包括与所述牵引车辆耦合的至少一个挂车,其中,在所述方法中,
10、a)检测所述车辆系统的状态数据,所述状态数据根据所述车辆系统的装载量并且根据与所述牵引车辆耦合的挂车的数量而改变,并且根据所述状态数据能够识别出:所述车辆系统的装载量和与所述牵引车辆耦合的挂车的数量在第一时间点(t1)与相对于所述第一时间点(t1)较晚的至少一个第二时间点(t2)之间已改变还是未改变,并且
11、b)尤其与所述状态数据无关地在第一时间点(t1)在第一估计或求取的框架中估计或求取用于所述车辆系统的总质量的第一值(w1),其中,
12、-如果基于所述状态数据识别出在所述第一时间点(t1)与所述第二时间点(t2)之间所述车辆系统的装载量没有发生显著改变并且与所述牵引车辆耦合的挂车的数量也没有发生改变,则保留所述第一值(w1)作为用于所述车辆系统的总质量的有效值或者考虑所述第一值作为用于进一步求取或估计所述车辆系统的总质量的初始值,但是
13、-如果基于所述状态数据识别出在所述第一时间点(t1)与所述第二时间点(t2)之间所述车辆系统的装载量已发生改变和/或与所述牵引车辆耦合的挂车的数量已发生改变,则在时间上在所述第一估计或求取之后的第二估计或求取的框架中尤其与所述状态数据无关地估计或求取用于所述车辆系统的总质量的第二值(w2)并且摒弃所述第一值(w1)。
14、与牵引车辆耦合的挂车的数量可以为数值“零”,因为车辆系统仅由该牵引车辆组成,或者该数量可以是任意的整数,其中,可耦接的挂车的数量当然有上限。
15、本发明已认识到,如果例如并非在车辆系统的车辆的每个轴上都存在轴载荷传感器,由所述轴载荷传感器可能容易地直接、即通过轴载荷传感器的轴载荷信号确定车辆系统的总质量,则总质量能够尤其与状态数据无关地以更高的品质来估计或确定,并且只要状态数据不(显著)改变,所估计的用于总质量的值就能够一直用作有效值。对于状态数据的求取而言足够的是,并非车辆系统的所有轴都配备有轴载荷传感器,因为借助少量的轴载荷传感器已经能够探测状态数据的改变并且因此能够探测车辆系统的装载量的改变。然后,状态数据的这样的改变具有如下后果:迄今为止所估计的用于总质量的值(w1)不能继续使用。相反,如果状态数据没有(显著)改变,则这表明车辆系统的装载量和耦接到牵引车辆上的挂车的数量都没有改变,使得迄今为止所估计的用于总质量的值(w1)能够继续被考虑或继续是有效的。
16、换言之,由评估装置求取或估计的用于车辆系统的总质量的第一值(w1)例如具有高品质,当根据状态数据识别出车辆系统的装载状态未改变或未显著改变并且与牵引车辆耦合的挂车的数量也未改变时,保留所述第一值例如用于进一步的计算或作为用于另外的系统的输入值和/或考虑该第一值用于进一步的求取或估计。
17、然后,例如在车辆系统的静止状态中,也存在用于车辆系统的总质量的值,该值例如在先前的行驶周期过程中基于驱动力与由惯性力和驱动阻力组成的和之间的平衡关系被求取为第一值。也能够省去或缩短对总质量的重新学习,为了达到一定的估计品质这可能是耗时的。
18、如上所述,用于车辆系统的总质量的第一值能够例如基于驱动力与由惯性力和驱动阻力组成的和之间的平衡关系被求取为第一值。
19、通过在从属权利要求中给出的特征来限定本发明的有利的改进方案。
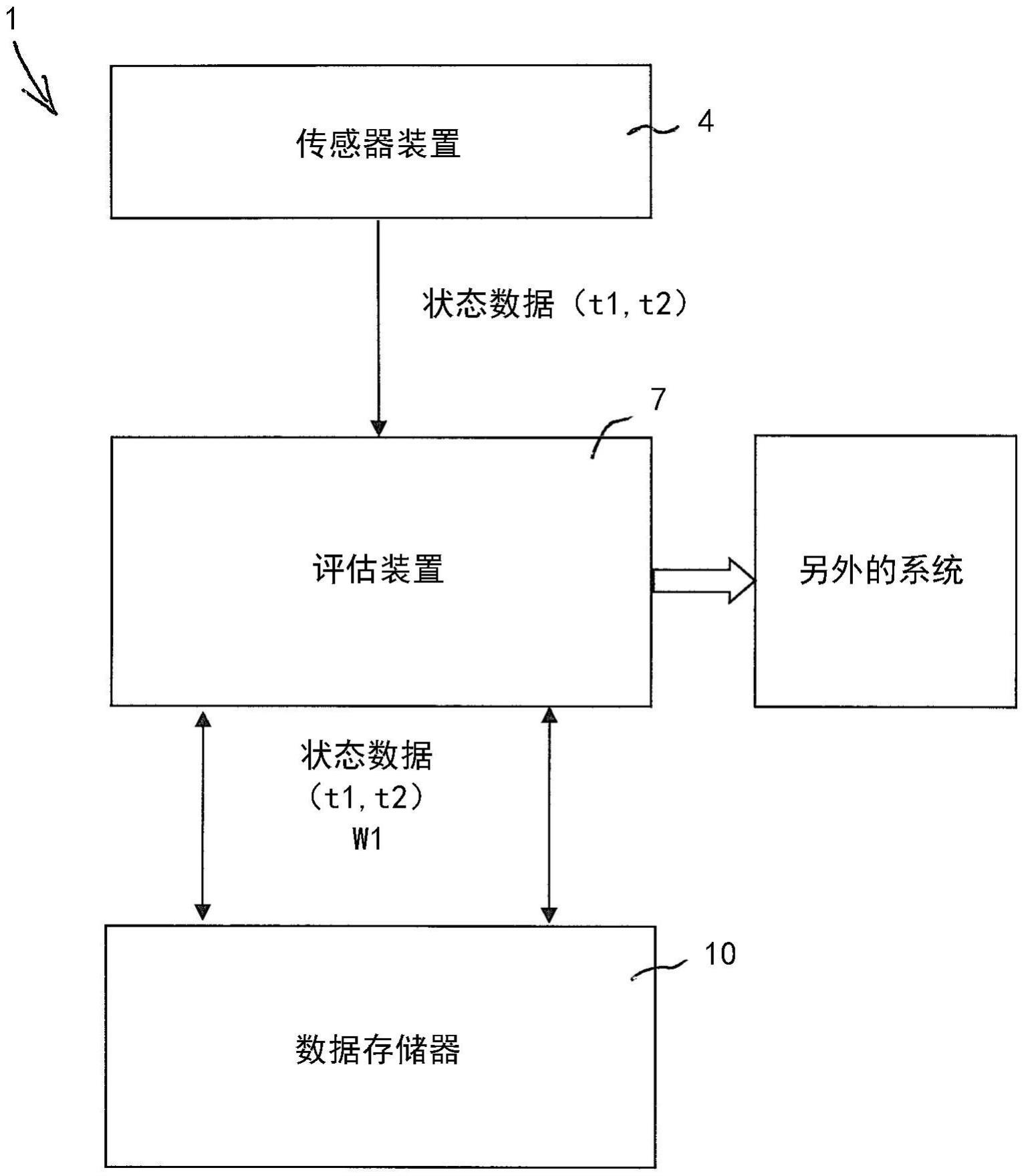
20、根据该系统的一种改进方案,该系统能够例如具有非易失性数据存储器,并且评估装置与非易失性数据存储器共同作用,使得评估装置:
21、a)在第一时间点(t1)将用于车辆系统的总质量的第一值(w1)和然后存在的第一状态数据(z1)读入到该非易失性数据存储器中,
22、b)在至少一个第二时间点(t2)确定第二状态数据(z2)并且将所述第二状态数据与所述第一状态数据(z1)进行比较,并且
23、-如果第二状态数据(z2)与第一状态数据(z1)的偏差大于所允许的偏差,则摒弃第一值(w1)并且估计或求取第二值(w2),但是
24、-如果第二状态数据(z2)与第一状态数据(z1)的偏差等于或小于所允许的偏差,则从数据存储器中读出所述第一值(w1)并且保留所述第一值作为用于车辆系统的总质量的有效值。
25、该系统的评估装置另外还能够构造成使得:即使在第一时间点(t1)与第二时间点(t2)之间通过评估装置已确定出现了理论上可能导致车辆系统的总质量改变的事件,所述评估装置也保留所述第一值(w1)作为用于车辆系统的总质量的有效值。在此,所述事件能够是下述事件中的至少一个:牵引车辆的至少一个点火变换、优选两个相继的点火变换;和/或车辆系统的静止状态时间段超过车辆系统的预给定的静止状态时间段。换言之,由此防止,尽管确定了可能导致车辆系统的总质量改变、但实际上没有导致车辆系统的总质量改变的事件,也保留用于总质量的第一值(w1),或者继续使用该第一值作为用于其他系统的输入值,并且不重新估计或确定用于总质量的值。
26、如果在牵引车辆中点火装置事先已接通,当例如牵引车辆的驱动机从状态“接通”切换到状态“关断”中时,该点火装置被关断,则发生牵引车辆的点火变换。术语“点火变换”或“点火装置”应广义地解释,因为除了具有作为驱动机的内燃机的牵引车辆之外,还包括具有由内燃机和电动机组成的组合的牵引车辆以及仅通过电动机来驱动的牵引车辆。
27、例如,评估装置为此获得牵引车辆的和/或至少一个挂车的至少一个车轮速度传感器的速度信号,以便能够确定静止状态,和/或评估装置为此获得牵引车辆的点火开关的信号。
28、装载量改变也能够通过至少一个振动接收器来识别,该振动接收器例如具有竖直的检测装置,并且然后能够检测通过装载过程触发的振动并且将其控制输入到评估装置中。
29、该系统的传感器装置能够至少包括以下装置:
30、a)在牵引车辆的至少一个轴上的和/或在至少一个挂车的至少一个轴上的至少一个轴载荷传感器,所述轴载荷传感器向评估装置提供至少一个轴载荷信号作为传感器信号;和/或
31、b)挂车识别装置,该挂车识别装置向评估装置提供关于耦接到牵引车辆上的挂车的数量的信息作为传感器信号;和/或
32、c)摄像机装置,该摄像机装置具有至少一个摄像机,所述摄像机布置在牵引车辆上和/或至少一个挂车上,使得所述摄像机提供至少一个图像信号,所述图像信号具有关于与牵引车辆耦合的挂车的数量的信息;和/或
33、d)至少一个激光雷达传感器或雷达传感器,所述激光雷达传感器或雷达传感器布置在牵引车辆上和/或至少一个挂车上,使得所述激光雷达传感器或雷达传感器提供至少一个信号,该信号具有关于与牵引车辆耦合的挂车的数量的信息;和/或
34、e)至少一个超声波传感器,所述超声波传感器布置在牵引车辆上和/或至少一个挂车上,使得所述超声波传感器提供至少一个信号,该信号具有关于与牵引车辆耦合的挂车的数量的信息。
35、尤其是,至少一个摄像机能够优选布置在牵引车辆上,使得所述摄像机检测牵引车辆的后方区域,并且所述摄像机提供至少一个图像信号,所述图像信号具有关于与牵引车辆耦合的挂车的数量的信息。该至少一个摄像机也能够是反射镜摄像机,该反射镜摄像机布置在牵引车辆的侧视镜中或侧视镜上。
36、在牵引车辆中,通常实施有挂车识别装置,该挂车识别装置产生挂车识别信号。通过该挂车识别装置,评估装置尤其能够识别如下内容:挂车可用性(识别到挂车,未识别到挂车,识别装置不可用);识别方法,例如通过can iso11992上的电流测量,plc;挂车类型(不具有abs的挂车,具有abs的挂车,具有ebs的挂车);挂车的状态和可用性(abs,减速器),挂车特性,例如挂车种类(半挂车、台车等),所述挂车特性能够例如通过can iso11992从挂车传送给牵引车辆上的评估装置;轴的数量;耦接的挂车的数量;和挂车几何尺寸(例如轴距)。
37、挂车的一个或多个轴载荷传感器的轴载荷信号也能够通过can iso11992从挂车传送给牵引车辆上的评估装置。
38、本发明还涉及一种制动系统或车辆控制系统或车辆调节系统,所述制动系统或车辆控制系统或车辆调节系统与上文描述的系统共同作用,使得该系统向所述制动系统或车辆控制系统或车辆调节系统提供用于车辆系统的总质量的第一值(w1)和/或第二值(w2)。
39、制动系统或车辆控制系统或车辆调节能够尤其包括电子调节式制动系统(ebs)、车辆动态调节装置、传动装置控制装置、用于至少部分自主驾驶的控制装置和/或牵引车辆与至少一个挂车之间的耦合力调节装置。
40、本发明还涉及一种车辆系统,该车辆系统包括牵引车辆并且必要时包括与牵引车辆耦合的至少一个挂车以及这样的制动系统或车辆控制系统或车辆调节系统。
41、根据该车辆系统的一种特别优选的实施方式,该车辆系统能够包括:
42、a)牵引车辆和与该牵引车辆耦合的鞍式半挂车,其中,传感器装置在牵引车辆的后轴和/或前轴上包括至少一个轴载荷传感器,但是在鞍式半挂车上不存在轴载荷传感器;或
43、b)不带有耦接的挂车的牵引车辆,其中,传感器装置在牵引车辆的后轴或前轴上包括至少一个轴载荷传感器;或
44、c)牵引车辆和与该牵引车辆耦合的鞍式半挂车,其中,传感器装置在鞍式半挂车的至少一个轴上包括至少一个轴载荷传感器,但是在牵引车辆上不存在轴载荷传感器;或
45、d)带有耦接的挂车的牵引车辆,该挂车例如不是鞍式半挂车,而是全挂车。
46、尤其是在这些车辆系统配置的情况下,仅基于轴载荷传感器的轴载荷信号作为状态数据来确定总质量是过于不准确的,因为并非所有轴都配备有轴载荷传感器。因此,在此例如分别与状态数据无关地估计总质量,但是使用轴载荷信号作为状态数据用于通过评估装置执行如下判断:状态数据在第一时间点t1与第二时间点t2之间是否已改变。
47、在上述情况a)中,当例如仅在牵引车辆的后轴上存在轴载荷传感器,但是在前轴上并且在鞍式半挂车的一个或多个轴上不存在轴载荷传感器时,通过牵引车辆的后轴上的轴载荷传感器来求取鞍式半挂车的支撑载荷。然后,该支撑载荷形成状态数据的一部分,并且因此适合用于如下判断:牵引车辆-鞍式半挂车组合的装载量在第一时间点t1与第二时间点t2之间已改变还是未改变。
48、在上述情况b)中,在该情况中,在车辆系统中仅存在牵引车辆,但是不存在挂车,并且在该情况中,传感器装置在牵引车辆的后轴或前轴上包括至少一个轴载荷传感器,在前轴或后轴上所测量的轴载荷形成状态数据的一部分,并且因此适合用于如下判断:牵引车辆的装载量在第一时间点t1与第二时间点t2之间已改变还是未改变。
49、在上述情况c)中,当在牵引车辆上不存在轴载荷传感器,但是在鞍式半挂车的至少一个轴上存在轴载荷传感器时,鞍式半挂车的一个或多个轴载荷传感器的轴载荷信号能够通过数据连接、例如通过can iso11992从鞍式半挂车传输到牵引车辆上的评估装置中并且在那里在可能的装载量改变方面被检验。
50、在情况a)、c)和d)中,通过挂车识别装置和/或摄像机装置还能够确定:鞍式半挂车/挂车在第一时间点t1与第二时间点t2之间与该牵引车辆解耦还是耦接到该牵引车辆上。
51、根据该方法的一种扩展方案,
52、a)在第一时间点(t1),将用于车辆系统的总质量的第一值(w1)和然后存在的第一状态数据(z1)存储在非易失性数据存储器中,
53、b)在至少一个第二时间点(t2),确定第二状态数据(z2)并且将所述第二状态数据与所述第一状态数据(z1)进行比较,并且
54、-如果已确定第二状态数据(z2)与第一状态数据(z1)的偏差大于所允许的偏差,则摒弃第一值(w1)并且估计或求取第二值(w2),但是-如果已确定第二状态数据(z2)与第一状态数据(z1)的偏差等于或小于所允许的偏差,则从数据存储器中读出第一值(w1)并且保留该第一值作为用于车辆系统的总质量的有效值。
55、在该方法中,即使在第一时间点(t1)与第二时间点(t2)之间已确定出现了理论上可能导致车辆系统的总质量改变的事件,也能够保留该第一值(w1)作为用于车辆系统的总质量的有效值。所述事件能够是下述事件中的至少一个:牵引车辆的至少一个点火变换、优选两个相继的点火变换;和/或车辆系统的静止状态时间段超过车辆系统的预给定的静止状态时间段。
56、根据该方法的或该设备的一种扩展方案,能够通过以下装置检测该车辆系统的状态数据:
57、a)在牵引车辆的至少一个轴上的和/或在至少一个挂车的至少一个轴上的至少一个轴载荷传感器,所述轴载荷传感器提供至少一个轴载荷信号作为传感器信号;和/或
58、b)挂车识别装置,该挂车识别装置提供关于耦接到牵引车辆上的挂车的数量的信息作为传感器信号;和/或
59、c)摄像机装置,该摄像机装置具有至少一个摄像机(6),所述摄像机布置在牵引车辆(2)上和/或至少一个挂车(3)上,使得该摄像机提供至少一个图像信号,所述图像信号具有关于与牵引车辆(2)耦合的挂车(3)的数量的信息;和/或
60、d)至少一个激光雷达传感器或雷达传感器,所述激光雷达传感器或雷达传感器布置在牵引车辆上和/或至少一个挂车上,使得所述激光雷达传感器或雷达传感器提供至少一个信号,该信号具有关于与牵引车辆耦合的挂车的数量的信息;和/或
61、e)至少一个超声波传感器,所述超声波传感器布置在牵引车辆上和/或至少一个挂车上,使得所述超声波传感器提供至少一个信号,该信号具有关于与牵引车辆耦合的挂车的数量的信息。
62、尤其是,至少一个摄像机能够优选布置在牵引车辆上,使得所述摄像机检测牵引车辆的后方区域,并且所述摄像机提供至少一个图像信号,所述图像信号具有关于与牵引车辆耦合的挂车的数量的信息。该至少一个摄像机也能够是反射镜摄像机,该反射镜摄像机布置在牵引车辆的侧视镜中或侧视镜上。
- 还没有人留言评论。精彩留言会获得点赞!