检查系统以及检查方法与流程
本公开涉及检查系统以及检查方法。
背景技术:
1、在专利文献1中,公开了将压铸产品浸渍在水槽内并基于从压铸产品产生的气泡来检查压铸产品的检查系统。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-155682号公报
技术实现思路
1、发明要解决的课题
2、在专利文献1中,利用致动器将对象物放入水槽中,在对象物的检查结束后,将对象物再次从水槽中取出(该文献的图2)。因此,无法连续地检查多个对象物。
3、本公开的目的在于,提高对象物的检查效率。
4、用于解决课题的手段
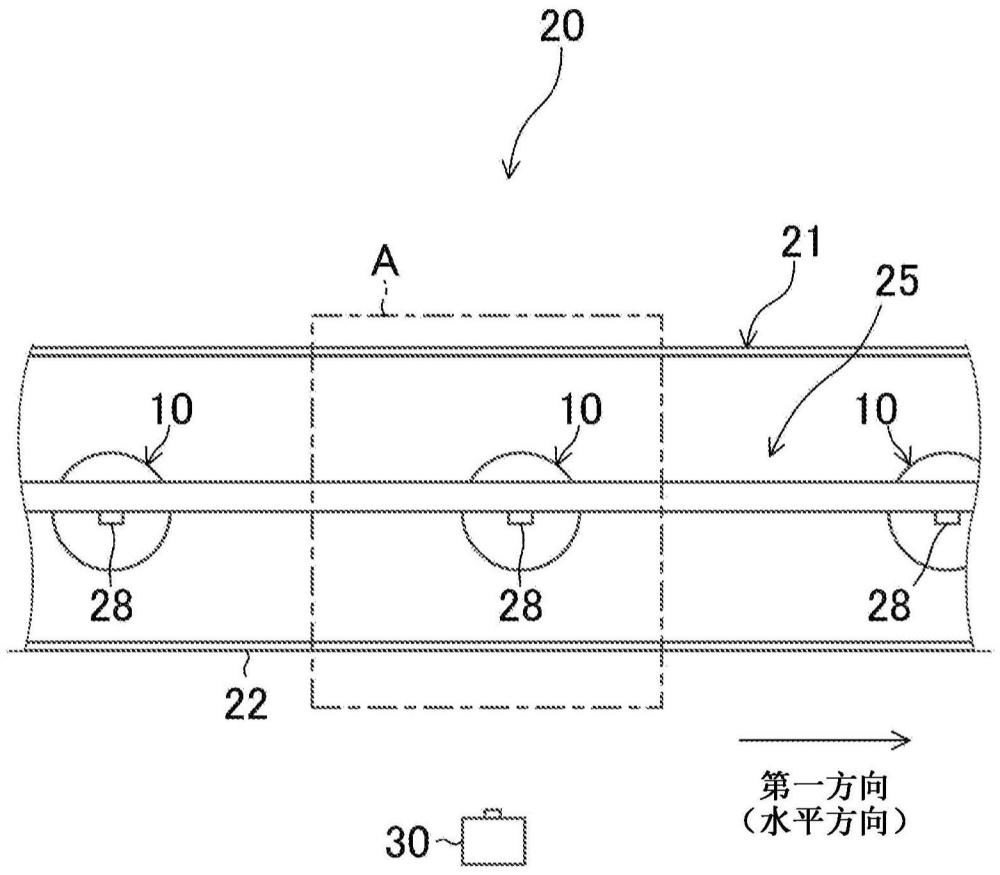
5、第一方式以检查系统为对象,具备:输送部25,其使多个对象物10在水中沿第一方向移动;拍摄部30,其对由所述输送部25输送的所述对象物10进行拍摄;以及控制部40,其基于所述拍摄部30拍摄到的所述对象物10的图像数据,确定从所述对象物10产生的气泡b。
6、在第一方式中,输送部25使多个对象物10沿第一方向移动。拍摄部30适当拍摄被输送的对象物10。控制部40基于对象物10的图像数据确定从对象物10产生的气泡b。在本方式中,通过利用输送部25使多个对象物10移动,能够连续地判定是否从各对象物10产生气泡。由此,能够提高检查效率。
7、第二方式在第一方式的基础上,所述控制部40将表示与所述对象物10的所述第一方向的移动相伴的该对象物10的位置变化的第一指标作为参数来确定所述气泡b。
8、在第二方式中,考虑对象物10的与第一方向相伴的位置变化来确定气泡b。这是因为,当对象物10沿第一方向移动时,图像数据中的气泡候选的坐标位置随着对象物10的移动而变化。
9、第三方式在第二方式的基础上,当所述拍摄部30拍摄到的对象物10的两个图像数据各自的气泡候选c的位置偏移在规定范围内时,所述控制部40进行将该两个图像数据的气泡候选c从气泡b的确定对象中排除的第一处理,在所述第一处理中,所述控制部40基于所述第一指标对所述两个图像数据中的后拍摄到的图像数据的气泡候选c的位置进行校正。
10、第三方式的控制部40在第一处理中,当两个图像数据各自的气泡候选c的位置偏移在规定范围内时,将该两个图像数据的气泡候选c从气泡b的确定对象中排除。这是因为,在气泡候选c的位置偏移在规定范围内的情况下,气泡候选c是对象物10的一部分(例如光的反射部)的可能性高。另一方面,在气泡候选c是对象物10的一部分的情况下,该气泡候选c随着对象物10的第一方向的移动而变化。因此,在第一处理中,控制部40基于第一指标对两个图像数据中的后拍摄到的图像数据的气泡候选c的位置进行校正。由此,能够考虑对象物10的移动,因此,能够抑制将对象物10的一部分确定为气泡b的误判定。
11、第四方式在第一~第三方式中任一方式的基础上,当表示所述拍摄部30拍摄到的所述对象物10的两个图像数据各自的气泡候选c的亮度差小于规定值的条件成立时,所述控制部40进行将该两个图像数据的气泡候选c作为气泡b的确定对象的第二处理。
12、在第四方式中,当表示两个图像数据中的气泡候选c的亮度差小于规定值的条件成立时,控制部40视为两者的气泡候选c一致,将这些气泡候选c作为气泡b的确定对象。
13、第五方式在第一~第四方式中任一方式的基础上,所述控制部40基于确定有相同气泡b的多个图像数据中的位于最低位置的气泡b的位置,确定所述对象物10的泄漏部位。
14、在第五方式中,在存在确定有相同气泡b的多个图像数据的情况下,位于最低位置的气泡b的位置最接近对象物10的泄漏部位。因此,控制部40基于该气泡b的位置来确定对象物10的泄漏部位。
15、第六方式在第五方式的基础上,所述控制部40基于将所述气泡b的位置与所述对象物10的泄漏部位关联起来的数据和位于所述最低位置的气泡b的位置,确定所述对象物10的泄漏部位。
16、在第六方式中,通过还使用将气泡b的位置与对象物10的泄漏部位关联起来的数据,能够对对象物10的泄漏部位进行分类。
17、第七方式在第一~第六方式中任一方面的基础上,所述控制部40使用cnn(convolutional neural network:卷积神经网络)或模板匹配来确定从所述对象物10产生的气泡b。
18、在第七方式中,通过使用cnn或模板匹配,能够提高气泡b的确定精度。
19、第八方式在第一~第七方式中任一方式的基础上,具备通知部45,该通知部45根据由所述控制部40进行的所述气泡b的确定,通知从该对象物10产生了气泡b或者该对象物10发生了泄漏。
20、在第八方式中,检查人员等能够借助通知部45获知气泡b的产生或对象物10的泄漏。
21、第九方式在第一~第八方式中任一方式的基础上,所述输送部25使所述对象物10沿作为所述第一方向的水平方向移动。
22、在第九方式中,输送部25使水中的对象物10沿水平方向移动。由此,能够简化输送部25的结构。
23、第十方式以检查方法为对象,利用输送部25使具有密闭式的机壳11的压缩机10在水中沿第一方向移动,利用拍摄部30对由所述输送部25输送的对象物10进行拍摄,利用控制部40基于所述拍摄部30拍摄到的对象物10的图像数据来确定从所述对象物10产生的气泡b。
24、在第十方式中,能够确定从压缩机10产生的气泡。由此,能够检查压缩机10的泄漏。
25、第十一方式在第十方式的基础上,将表示与所述压缩机10的所述第一方向的移动相伴的所述压缩机10的位置变化的第一指标作为参数来确定所述气泡b。
26、在第十一方式中,考虑压缩机10的与第一方向相伴的位置变化来确定气泡b。这是因为,当压缩机10沿第一方向移动时,图像数据中的气泡候选的坐标位置随着压缩机10的移动而变化。
技术特征:
1.一种检查系统,其具备:
2.根据权利要求1所述的检查系统,其中,
3.根据权利要求2所述的检查系统,其中,
4.根据权利要求1至3中的任一项所述的检查系统,其中,
5.根据权利要求1至4中的任一项所述的检查系统,其中,
6.根据权利要求5所述的检查系统,其中,
7.根据权利要求1至6中的任一项所述的检查系统,其中,
8.根据权利要求1至7中的任一项所述的检查系统,其中,
9.根据权利要求1至8中的任一项所述的检查系统,其中,
10.一种检查方法,其中,
11.根据权利要求10所述的检查方法,其中,
技术总结
具备:输送部(25),其使多个对象物(10)在水中沿第一方向移动;拍摄部(30),其对由输送部(25)输送的所述对象物(10)进行拍摄;以及控制部(40),其基于拍摄部(30)拍摄到的对象物(10)的图像数据,确定从对象物(10)产生的气泡(B)。
技术研发人员:儿玉旭,松本畅二,田中朋阳,佐藤直之
受保护的技术使用者:大金工业株式会社
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!