一种基于车载传感的桥梁刚度测量方法、系统及装置
本发明属于桥梁工程测量,具体涉及一种基于车载传感的桥梁刚度测量方法、系统及装置。
背景技术:
1、桥梁是交通基础设施的关键节点,随着服役期的延长,桥梁结构不可避免地会出现性能衰退。为了确保桥梁结构的安全运营,如何准确把握桥梁结构的使用状态是桥梁管养部门的痛点,也是技术难点。桥梁检测是桥梁使用状态评定的一种有效技术手段,桥梁刚度是反映桥梁使用状态的关键参数之一。面对量大面广的桥梁结构,如何快速检测出桥梁的刚度是急需解决的技术难题。
2、传统的检测方法采用桥梁挠度来推算桥梁结构的刚度。目前,常用的挠度检测方法主要有:水准仪测试方法、静力水准仪测试方法、位移计测试方法。水准仪测试方法需要在桥面上布置众多高程测试点,利用测试点与桥梁外不动点的高程差反映测试点的挠度,该方法检测速度慢,误差大;静力水准仪测试方法是利用连通器原理来测试桥梁的挠度,该方法对桥梁挠度的反映时间长,不适合快速测试;位移计测试方法则需要借助脚手架把位移计布置于桥梁底部进行接触式测量,该方法需要搭设脚手架,费时费力,当桥梁跨越山谷或河流时难以实现;综上,采用传统刚度计算方法存在检测速度慢以及精度低的问题。
3、目前我国公路桥梁数量已超过90万座,传统的桥梁刚度检测方法的劣势日益凸显,已经不能很好地满足桥梁检测的工作需求。因此,急需我们提供一种检测速度快、检测精度高的桥梁刚度检测方法。
技术实现思路
1、基于上述技术问题,本发明提供一种基于车载传感的桥梁刚度测量方法、系统及装置,以实现快速、精确检测桥梁刚度。
2、本发明提供一种基于车载传感的桥梁刚度测量方法,包括:
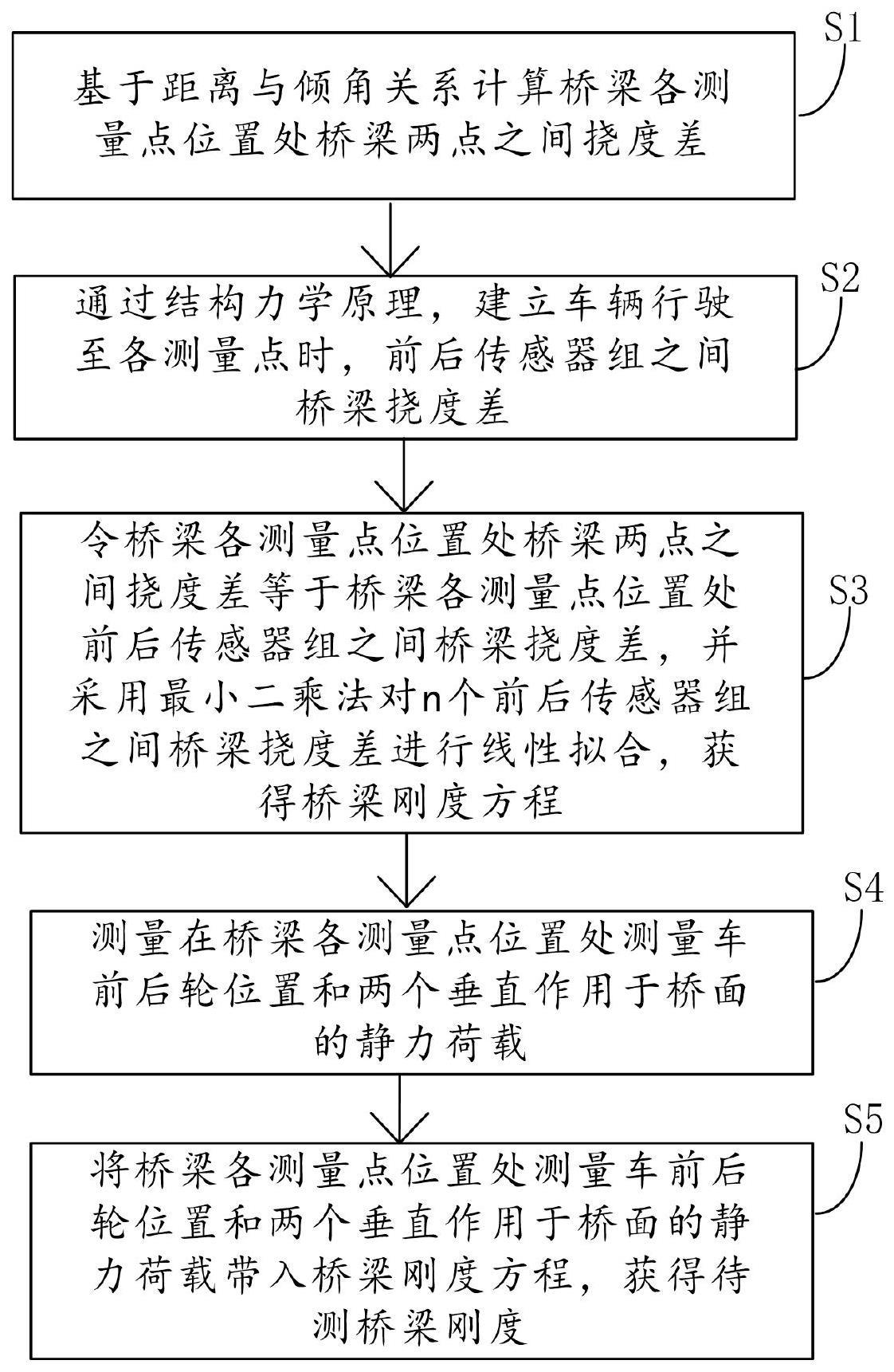
3、基于距离与倾角关系计算桥梁各测量点位置处桥梁两点之间挠度差。
4、通过结构力学原理,建立车辆行驶至各测量点时,前后传感器组之间桥梁挠度差。
5、令桥梁各测量点位置处桥梁两点之间挠度差等于桥梁各测量点位置处前后传感器组之间桥梁挠度差,并采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,获得桥梁刚度方程;其中,n为大于1的正整数。
6、测量在桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载。
7、将桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载带入桥梁刚度方程,获得待测桥梁刚度。
8、可选地,所述基于距离与倾角关系计算桥梁各测量点位置处桥梁两点之间挠度差,具体包括:
9、利用各激光测距传感器测量桥梁各测量点位置处各激光测距传感器到桥面距离。
10、利用各倾角传感器测量桥梁各测量点位置处测量车的水平横向倾角。
11、根据各测量点位置处各激光测距传感器到桥面距离和测量车的水平横向倾角确定各测量点位置处测量车底部到桥面的垂直距离。
12、根据桥梁各测量点位置处测量车底部到桥面的垂直距离确定桥梁各测量点位置处桥梁两点之间挠度差。
13、可选地,所述通过结构力学原理,建立车辆行驶至各测量点时,前后传感器组之间桥梁挠度差,具体包括:
14、通过结构力学原理,建立车辆行驶至各测量点时,桥梁在车辆重力作用下的车辆前传感器组位置处桥梁挠度和车辆后传感器组位置处桥梁挠度。
15、根据车辆前后传感器组位置处桥梁挠度计算前后传感器组之间桥梁挠度差。
16、可选地,在桥梁第i测量点位置处车辆后传感器组位置处桥梁挠度δi1公式为:
17、
18、其中,δi1表示在桥梁第i测量点位置处车辆后传感器组位置处桥梁挠度,表示测量车位于第i测量点时,前轮作用时桥梁产生的弯矩函数,mpi1表示测量车位于第i测量点时,单位荷载作用于前轮位置处的弯矩函数,ds表示曲线积分,ei表示待测桥梁刚度,p1和p2分别表示测量车对桥面的作用力,等效简化为两个垂直作用于桥面的静力荷载,xi1表示在桥梁第i测量点位置处测量车后车轮位置,xi2表示在桥梁第i测量点位置处测量车前车轮位置,l表示桥梁长度。
19、可选地,在桥梁第i测量点位置处车辆前传感器组位置处桥梁挠度δi2公式为:
20、
21、其中,δi2表示在桥梁第i测量点位置处车辆前传感器组位置处桥梁挠度,表示测量车位于第i测量点时,后轮作用时桥梁产生的弯矩函数,mpi2表示测量车位于第i测量点时,单位荷载作用于后轮位置处的弯矩函数,ds表示曲线积分,ei表示待测桥梁刚度,p1和p2分别表示测量车对桥面的作用力,等效简化为两个垂直作用于桥面的静力荷载,xi1表示在桥梁第i测量点位置处测量车后车轮位置,xi2表示在桥梁第i测量点位置处测量车前车轮位置,l表示桥梁长度。
22、可选地,所述令桥梁各测量点位置处桥梁两点之间挠度差等于桥梁各测量点位置处前后传感器组之间桥梁挠度差,并采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,获得桥梁刚度方程,具体公式为:
23、
24、
25、
26、δd’i=δi;
27、其中,δi表示在桥梁第i测量点位置处前后传感器组之间桥梁挠度差,l为桥梁长度,ei表示待测桥梁刚度,p1和p2分别表示测量车对桥面的作用力,等效简化为两个垂直作用于桥面的静力荷载,xi1表示在桥梁第i测量点位置处测量车后车轮位置,xi2表示在桥梁第i测量点位置处测量车前车轮位置,n表示桥梁测量点的总个数,δd’i表示在桥梁第i测量点位置处桥梁两点之间挠度差。
28、本发明还提供一种基于车载传感的桥梁刚度测量系统,所述系统包括:
29、第一挠度差确定模块,用于基于距离与倾角关系计算桥梁各测量点位置处桥梁两点之间挠度差。
30、第二挠度差确定模块,用于通过结构力学原理,建立车辆行驶至各测量点时,前后传感器组之间桥梁挠度差。
31、桥梁刚度方程建立模块,用于令桥梁各测量点位置处桥梁两点之间挠度差等于桥梁各测量点位置处前后传感器组之间桥梁挠度差,并采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,获得桥梁刚度方程;其中,n为大于1的正整数。
32、测量模块,用于测量在桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载。
33、待测桥梁刚度求取模块,用于将桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载带入桥梁刚度方程,获得待测桥梁刚度。
34、可选地,所述第二挠度差确定模块,具体包括:
35、车辆前后传感器组位置处桥梁挠度确定单元,用于通过结构力学原理,建立车辆行驶至各测量点时,桥梁在车辆重力作用下的车辆前传感器组位置处桥梁挠度和车辆后传感器组位置处桥梁挠度。
36、前后传感器组之间桥梁挠度差计算单元,用于根据车辆前后传感器组位置处桥梁挠度计算前后传感器组之间桥梁挠度差。
37、可选地,所述令桥梁各测量点位置处桥梁两点之间挠度差等于桥梁各测量点位置处前后传感器组之间桥梁挠度差,并采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,获得桥梁刚度方程,具体公式为:
38、
39、
40、
41、δd’i=δi;
42、其中,δi表示在桥梁第i测量点位置处前后传感器组之间桥梁挠度差,l为桥梁长度,ei表示待测桥梁刚度,p1和p2分别表示测量车对桥面的作用力,等效简化为两个垂直作用于桥面的静力荷载,xi1表示在桥梁第i测量点位置处测量车后车轮位置,xi2表示在桥梁第i测量点位置处测量车前车轮位置,n表示桥梁测量点的总个数,δd’i表示在桥梁第i测量点位置处桥梁两点之间挠度差。
43、本发明还提供一种基于车载传感的桥梁刚度测量装置,所述装置包括:
44、2个激光测距传感器,设置在测量车的底面,用于测量桥梁各测量点位置处各激光测距传感器到桥面距离。
45、2个倾角传感器,设置在测量车的底面,用于测量桥梁各测量点位置处测量车的水平横向倾角。
46、计算模块,分别与各激光测距传感器和各倾角传感器相连,用于采用上述的方法确定待测桥梁刚度。
47、本发明与现有技术相比,具有以下有益效果:
48、本发明公开一种基于车载传感的桥梁刚度测量方法、系统及装置,方法包括:首先基于距离与倾角关系计算桥梁各测量点位置处桥梁两点之间挠度差。其次通过结构力学原理,建立车辆行驶至各测量点时,前后传感器组之间桥梁挠度差。再次令桥梁各测量点位置处桥梁两点之间挠度差等于桥梁各测量点位置处前后传感器组之间桥梁挠度差,并采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,获得桥梁刚度方程。然后测量在桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载。最后将桥梁各测量点位置处测量车前后轮位置和两个垂直作用于桥面的静力荷载带入桥梁刚度方程,获得待测桥梁刚度。本发明采用最小二乘法对n个前后传感器组之间桥梁挠度差进行线性拟合,通过最小化误差的平方和寻找数据的最佳函数匹配,获得桥梁刚度方程,后续直接将测量车前后轮位置和两个垂直作用于桥面的静力荷载带入桥梁刚度方程即可,不仅可以提高待测桥梁刚度的计算速度,还可以提高待测桥梁刚度的计算精度,避免了传统桥梁检测时现场布设仪器这一繁琐过程。
- 还没有人留言评论。精彩留言会获得点赞!