一种非球面面形误差拟合方法及装置
本发明涉及光机集成分析领域,具体而言,涉及一种非球面面形误差拟合方法及装置。
背景技术:
1、光机集成分析基于光机系统光学系统设计、机械结构设计及分析和自动控制系统设计三大基本模块的常用软件,建立各自相对独立的模型,由计算机程序打通互联通道,将三者有机地联系起来,构成个集成的光机系统模型,用以对各模块间的相互作用及接口进行校验、工作性能分析和优化设计。集成分析方法是目前国际上普遍采用的一种解决跨学科问题的方法,它可以模拟多种因素对系统的共同作用效果,并且探究各因素之间的相互耦合关系,从而给出系统在使用环境下的真实响应。
2、如何让光学软件系统识别机械仿真结果数据,是建立系统间互联的关键问题之一。众所周知,机械结构的有限元仿真技术(fem)发展已经相当成熟,利用fem很容易获得光机结构在外载荷(力、热)作用下的变形情况。识别光机系统中镜片的面形变化最为关键,利用有限元仿真获得的面形数据,在光学软件中重建面形,就可以模拟相应面形下光学系统的响应,实现了从外载荷输入,到光学响应输出的单向过程。通过更改设计,反复叠加该单向过程,就实现了系统优化。
3、在光学软件中镜面面形表示的方法是实际面形=理想面形+面形误差,而面形误差则是采用zernike多项式进行表示。zernike多项式是在单位圆上一组正交多项式,通过多项式乘以相应的系数,再相加,就得到一个三维面形数据。zernike多项式不同项有不同的意义,且与初级像差(球差、彗差、像散、场曲、畸变)相对应,因此适于拟合光学面形误差。在结构有限元分析结果中的面形误差数据,拟合计算zernike多项式系数,就完成了面形误差的表示。然后在光学软件中输入相应的zernike系数,就完成了光学软件中面形重建,实现了结构-光学系统的互联过程。
4、但结构有限元分析结果中包含所有单元节点在笛卡尔坐标系下的位移数据,而面形误差则是节点沿着理论镜面位置法线方向的距离,有限元仿真结果并不等于面形误差,需要采用一定的数据处理方法,从仿真结果中计算面形误差。
5、光学系统中绝大多数的镜面都是球面,由于球面是以圆心为中心点的旋转对称结构,在对球面拟合时,利用仿真变形节点坐标值拟合出圆心坐标,再计算每个节点距离拟合圆心坐标值距离,这些距离值与理论球半径的差值,就是面形误差。拟合圆心与理论圆心的差异就是所谓的镜片刚体位移。由于球面高度对称性,在拟合zernike系数时就会发现,拟合半径和理论半径的差值就是zernike多项式中的平移项(第1项);zernike多项式中表示误差倾斜项(第2、3项)在理论上是不存在的,因为倾斜项在圆心拟合过程中天然消除了。因此在球面误差zernike系数拟合过程中,可以首先剔除多项式中的前三项,则拟合面形会更加准确,这实际上就是去除镜片刚体位移的过程。
6、对于非球面来说,存在一根旋转对称轴,不能像球面一样简单的去除掉刚体位移,需要采用全新的数据处理方法计算面形误差。非球面镜经过有限元分析后,面上节点位置发生变化,对称轴位置也随之发生变化,相当于镜片产生了平移项,如果镜片产生非旋转对称的变形,则会产生相对于对称轴的倾斜项。
7、理论上可以不用去除非球面镜面的刚体位移,直接利用zernike多项式拟合面形误差,zernike多项式的前三项包含了镜片的平移项和倾斜项,这三项系数反应镜片刚体位移的大小,但是实验中发现,相对于去除刚体位移的面形误差,没有去除刚体位移的面形误差拟合结果误差很大,zernike多项式不能很好的表示误差分布情况。主要原因有两点,第一zernike多项式第一项仅代表了轴向的平移情况,由于非球面有对称轴,所以镜子变形时也存在径向的平移量,这是zernike多项式无法表示的;第二zernike多项式表示面形误差过程本身就是数据拟合过程,它是通过平衡所有多项式权重给出的结果,刚体位移项中也包含了其他像差类型的影响因素,所体现的刚体位移大小并不绝对。所以,如果可以首先去除面形误差中的平移项或者全部的刚体位移,在进行多项式的拟合,得到的结果也会更为精确。
技术实现思路
1、本发明实施例提供了一种非球面面形误差拟合方法及装置,以至少解决现有非球面面形误差拟合精度低的技术问题。
2、根据本发明的一实施例,提供了一种非球面面形误差拟合方法,包括以下步骤:
3、确定非球面变形后的旋转对称轴;
4、将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正;
5、计算非球面面形误差,并对面形误差进行拟合,得到面形拟合误差量。
6、进一步地,确定非球面变形后的旋转对称轴包括:
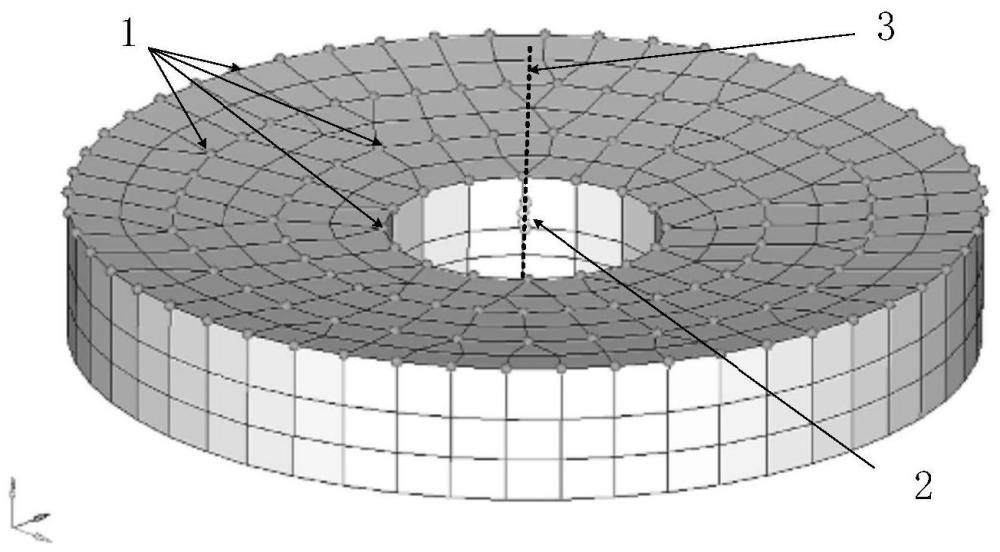
7、对有限元模型进行网格划分时,将节点布置在同心圆环上,多个同心节点圆拟合出相应数量的圆心点,所有圆心点拟合出一条直线,该直线为变形后球面的旋转对称轴。
8、进一步地,确定非球面变形后的旋转对称轴具体包括:
9、在划分有限单元网格前,将结构模型平移,使其旋转对称轴与坐标系某一坐标轴重合,理论轴线位于坐标轴上;
10、在网格划分上,所有面上网格节点均分布于绕旋转对称轴的同心圆上,每个节点圆的圆心均位于旋转对称轴上;
11、仿真分析得到结构变形数据,根据最小二乘原理,每个节点圆上节点坐标均拟合出一个空间位置的圆心坐标,再次利用最小二乘原理,所有圆心坐标拟合计算出一条直线,该直线为变形后非球面的旋转对称轴。
12、进一步地,将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正包括:
13、在得到变形后旋转对称轴的位置后,利用罗德里格斯旋转公式,将镜片网格节点整体转动,使变形后的旋转对称轴与理论轴线重合,完成去除倾斜过程。
14、进一步地,将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正具体包括:
15、进行去除径向平移量处理,首先评价面形误差rms值,rms定义为节点在理想镜面法线方向上偏离理想镜面的均方根,计算变形后镜面的rms值,然后在旋转对称轴法平面内沿两个方向整体平移镜面,直到镜面rms值最小。
16、进一步地,将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正还包括:
17、进行去除轴向平移量处理,当变形后节点与焦点距离小于理想镜面位置与焦点距离时,定义面形误差为负,计算所有节点位置面形误差平均值,若平均值为负,将镜面沿焦点到镜面的轴线方向移动,反之则向镜面到焦点方向移动,直到面形误差平均值接近0位置。
18、进一步地,计算非球面面形误差,并对面形误差进行拟合,得到面形拟合误差量包括:
19、完全去除了平移和倾斜的镜面后,计算面形误差rms,再利用zernike多项式对面形误差进行拟合,求得多形式系数,完成对面形误差的表示,最后求出面形拟合误差量。
20、根据本发明的另一实施例,提供了一种非球面面形误差拟合装置,包括:
21、确定单元,用于确定非球面变形后的旋转对称轴;
22、倾斜校正单元,用于将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正;
23、拟合单元,用于计算非球面面形误差,并对面形误差进行拟合,得到面形拟合误差量。
24、一种存储介质,存储介质存储有能够实现上述任意一项非球面面形误差拟合方法的程序文件。
25、一种处理器,处理器用于运行程序,其中,程序运行时执行上述任意一项的非球面面形误差拟合方法。
26、本发明实施例中的非球面面形误差拟合方法及装置,首先确定非球面变形后的旋转对称轴;再将镜片网格节点整体转动使变形后的旋转对称轴与理论轴线重合进行非球面倾斜校正;最后计算非球面面形误差,并对面形误差进行拟合,得到面形拟合误差量。本发明利用结构有限元分析结果,采用特殊的数据处理方法和相应的面形评价方法,最终实现了zernike多项式对非球面面形误差的重建过程。
- 还没有人留言评论。精彩留言会获得点赞!