一种基于飞行时间的扩展测距方法及系统
本发明涉及空间数据处理,更具体地,涉及一种基于飞行时间的扩展测距方法及系统。
背景技术:
1、飞行时间(time of flight,tof)测距成像技术在3d成像、多点测距等研究领域中成为最重要和最富有创新的研究方向之一。目前,tof成像技术主要分为直接飞行时间成像技术和间接飞行时间成像技术。在直接飞行时间技术成像方案中,由于需要使用高精度计时器来测量与光源同步的发射光脉冲到接收端的反射脉冲之间的时间差,因此该方案对器件的性能要求较高,目前尚无法大规模使用。在间接飞行时间成像方案中,主要是通过测量发射信号与接收信号之间的相位差来间接计算出光脉冲信号的往返飞行时间,从而避免了对高精度计时器的使用需求,因此该方案的技术路线也成为目前的主流tof相机所采用的解决方案。
2、间接飞行时间测量技术也称为相位法技术,该技术是发射端发射出调制后的连续正弦光信号,然后基于测量所得的输出与输入信号之间的相位差,通过相位测量公式求解飞行时间。但是该技术也存在一些劣势,如容易出现相位周期混叠的现象,导致计算距离可能出现模糊混叠的结果。换句话说,当返回的光波超过2π时,会与前面的光波叠在一起,导致光波的相位出现混叠,进而出现距离模糊和混叠。为避免此情况的发生,tof相机的测量距离被限制在其中c为光速,f为光波频率,这就导致可探测的实际深度值减少。目前还有文献提出采取多频的方法来解决tof相机的相位混叠和距离模糊问题,即向场景中发射多种不同频率的信号,通过测量这些信号的相位值,然后通过它们建立的等式关系来解决距离模糊问题。但这种方法不仅需要较大的功耗,也需要兼顾不同频率信号的周期时长来采集这些往返的信号,难以应用于对实时性要求较高的动态场景。此外,还有文献提出利用梯度边缘检测算法和分水岭分割算法对深度图进行分割,然后计算每个分割区域的平均幅度,最后通过人工选择一个幅度阈值来判断每个区域是否出现了距离模糊现象。该方法虽然简单,但是在测量之前需要人工计算出现模糊距离临界值的幅度,并且在场景较为复杂时,修复效果下降明显,在距离拓展时没有考虑深度空洞现象,因而在实际场景中的灵活性和鲁棒性均较差。有文献提出把像素点相位混叠的结果量化成多个离散值,提出了一种基于单频测量的幅度-距离概率模型和平滑约束模型,通过设置概率模型和平滑约束模型的不同权重系数以全局优化的方式来解决这种问题。然而,幅度信息不仅与距离有关,还与物体的发射率和光波的入射角度有关。因此,幅度信息与距离之间的匹配关系难以用单一的闭式线性方程表示,但该文献提出的幅度-距离概率模型并没有充分考虑上述因素的影响,使得该方案在复杂的应用场景中鲁棒性不高;另一方面,由于在全局优化时使用了信念传播(belief propagation,bp)算法,在运行过程存在大量的迭代计算过程,使得该方案的时间成本极高。
技术实现思路
1、本发明为克服上述现有技术所述的间接飞行时间测量技术中存在幅度信息与距离不匹配、在实际场景中的灵活性和鲁棒性均较差的缺陷,提供一种基于飞行时间的扩展测距方法及系统。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种基于飞行时间的扩展测距方法,包括以下步骤:
4、s1、根据目标物体q的幅度与距离的关系,利用狄拉克函数对目标物体q的幅度与距离进行概率建模,得到目标物体q的幅度-距离概率曲线模型;
5、s2、设定若干不同幅值,对所述幅度-距离概率曲线模型进行仿真实验,对设定的各组幅值及其对应的距离数据组合进行函数拟合,得到用于判断幅度-距离相关性的基准函数;
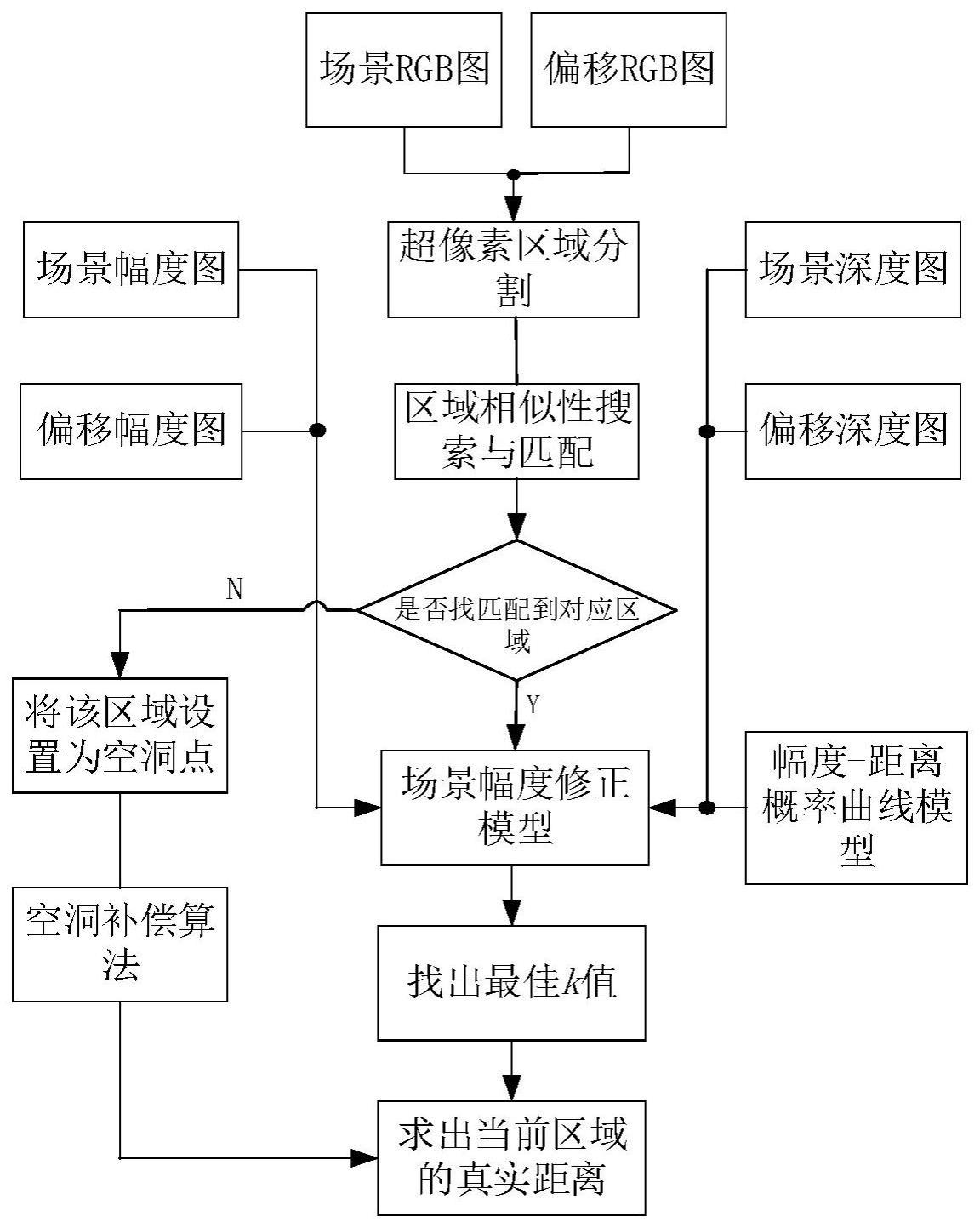
6、s3、采用tof相机在固定点o1获取场景rgb图i1,在与固定点o1偏移一定距离d的偏移点o2获取场景rgb图i2;
7、s4、对所述场景rgb图i1和i2分别进行超像素分割和区域划分,并分别计算i1和i2中每个区域的特征向量;根据i1和i2中每个区域的特征向量,将i2中任意区域的位置信息及特征向量与i1中所有区域的位置信息及特征向量进行比较,将i2中位置信息及特征向量最为接近的区域与i1中相应的区域进行一一匹配;
8、s5、对完成匹配的区域进行幅度修正处理;
9、s6、对于完成匹配的区域,将经过修正处理的幅度信息输入所述幅度-距离概率曲线模型中,得到i1和i2中每个区域的粗略距离,再利用粗略距离估计出相应区域的混叠周期k,通过di+k·dmax求出当前区域的真实距离,其中di表示tof相机到相应区域的原始测量距离,dmax为最大非模糊距离;
10、对于无法成功匹配且幅度不为0的区域,将i1和i2中每个区域内各个像素点的幅度值直接输入所述幅度-距离概率曲线模型中,计算当前幅度值对应的距离信息,然后将该距离信息与当前tof相机测量的距离信息相比较:如果误差结果小于误差距离阈值dt,则设最佳k值为0;否则将该区域置为空洞后采用空洞补偿算法处理。
11、进一步地,本发明还提出一种基于飞行时间的扩展测距系统,应用本发明提出的扩展测距方法。其中,所述系统包括:
12、tof相机,用于采集固定点o1和与固定点o1偏移一定距离d的偏移点o2的rgb图i1、i2;
13、区域划分模块,用于对所述场景rgb图i1和i2分别进行超像素分割和区域划分,并分别计算i1和i2中每个区域的特征向量;
14、区域匹配模块,用于根据i1和i2中每个区域的特征向量,将i2中任意区域的位置信息及特征向量与i1中所有区域的位置信息及特征向量进行比较,将i2中位置信息及特征向量最为接近的区域与i1中相应的区域进行一一匹配;
15、幅度修正模块,用于对完成匹配的区域进行幅度修正处理;
16、扩展测距模块,其中包括根据目标物体q的幅度与距离的关系构建的幅度-距离概率曲线模型;所述扩展测距模块对于完成匹配的区域,用于将其经过修正处理的幅度信息输入所述幅度-距离概率曲线模型中,得到i1和i2中每个区域的粗略距离,再利用粗略距离估计出相应区域的混叠周期k,通过di+k·dmax求出当前区域的真实距离,其中di表示tof相机到相应区域的原始测量距离,dmax为最大非模糊距离;对于无法成功匹配且幅度不为0的区域,用于将i1和i2中每个区域内各个像素点的幅度值直接输入所述幅度-距离概率曲线模型中,计算当前幅度值对应的距离信息,然后将该距离信息与当前tof相机测量的距离信息相比较:如果误差结果小于误差距离阈值dt,则设最佳k值为0;否则将该区域置为空洞后采用空洞补偿算法处理。
17、进一步地,本发明还提出了一种计算机设备,包括一个或多个处理器;存储器;以及一个或多个应用程序;其中所述一个或多个应用程序被存储于所述存储器中;所述存储器被配置为由所述处理器执行本发明提出的基于飞行时间的扩展测距方法的操作。
18、与现有技术相比,本发明技术方案的有益效果是:本发明通过构建幅度-距离概率曲线模型,将所有物体的实际幅度信息换算到基准幅度-距离曲线下统一比较,解决了幅度信息与距离不匹配的问题;当超过tof相机原有测距范围导致距离混叠的情况下,本发明能够将tof相机的理论最大测量范围从1个测量周期扩展到k+1(k>0)个测量周期,从而可以大幅拓展测量距离;本发明在扩展测距过程中不需要获得场景中的物体的反射率和aoi作为先验知识,因此有效提高了方案的鲁棒性和适用性;本发明还加入了幅度修正操作,能够在不同场景下均可获得更明显的性能增益和更为准确的扩展测距效果。
- 还没有人留言评论。精彩留言会获得点赞!