船舶总振动预报中脉动压力施加方法与流程
本发明涉及船舶,特别涉及一种船舶总振动预报中脉动压力施加方法。
背景技术:
1、目前常规船舶总振动预报中,脉动压力通常采用集中力或者面载荷的方法在船体外表面上进行施加,采用来源于空泡试验报告的总脉动压力大小作为输入载荷。
2、目前的船舶总振动预报,既没有区分脉动压力的不同成分,即没有区分空泡引起的脉动压力和非空泡引起的脉动压力,也没有对两者的衰减规律加以区别,没有对两者不同的相位角进行区分,其计算结果欠缺合理性。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术存在的上述缺陷,提供一种船舶总振动预报中脉动压力施加方法。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种船舶总振动预报中脉动压力施加方法,其包括以下步骤:
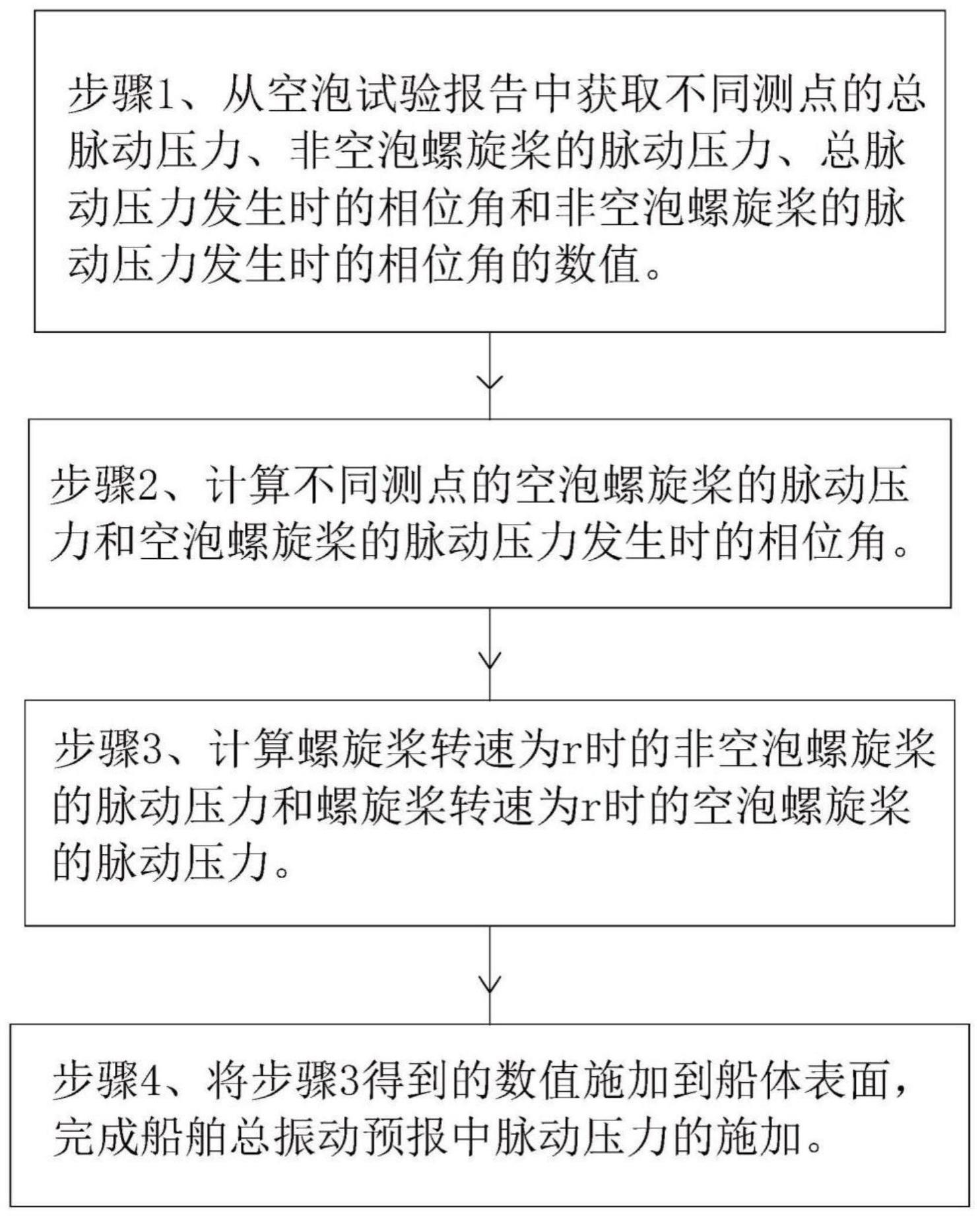
4、步骤1、从船舶空泡试验报告中获取不同测点的总脉动压力p、非空泡螺旋桨的脉动压力p1、总脉动压力p发生时的相位角θ和非空泡螺旋桨的脉动压力p1发生时的相位角θ1的数值;
5、步骤2、计算不同测点的空泡螺旋桨的脉动压力p2和空泡螺旋桨的脉动压力p2发生时的相位角θ2;
6、步骤3、计算螺旋桨转速为r时的非空泡螺旋桨的脉动压力p1r和螺旋桨转速为r时的空泡螺旋桨的脉动压力p2r;
7、步骤4、将步骤3得到的p1r和p2r的数值施加到船体表面,完成船舶总振动预报中脉动压力的施加。
8、步骤2中,不同测点的空泡螺旋桨的脉动压力p2的计算公式为:
9、
10、其中,ε1=θ-θ1。
11、根据步骤1中p、θ、p1和θ1的数值,得到p2的数值。
12、步骤2中,空泡螺旋桨的脉动压力p2发生时的相位角θ2的计算公式为:
13、
14、根据步骤1中p、θ、p1和θ1的数值,得到θ2的数值。
15、步骤3中,螺旋桨转速为r时的非空泡螺旋桨的脉动压力p1r的计算公式为:
16、
17、其中,nm为步骤1中空泡试验报告中的螺旋桨的转速。
18、取步骤1中船舶空泡试验报告中测得的非空泡螺旋桨的脉动压力p1的最大值,输入到p1r的计算公式,得到p1r的数值。
19、步骤3中,螺旋桨转速为r时的空泡螺旋桨的脉动压力p2r的计算公式为:
20、
21、其中,nm为步骤1中船舶空泡试验报告中的螺旋桨的转速。
22、取步骤2中得到的所有测点的空泡螺旋桨的脉动压力p2的最大值,输入到p2r的计算公式,得到p2r的数值。
23、步骤4中,船舶总振动预报中脉动压力的施加完毕后,进行船体总振动计算。
24、本发明的有益效果在于:本发明解决了空泡压力和非空泡压力大小及相位角不一致导致总振动计算无法准确预报的问题。本发明的船舶总振动预报中脉动压力施加方法,区分了空泡压力和非空泡压力,按照脉动压力的不同成份进行分别施加,为船舶的总振动预报结果的准确性提供了可靠合理的施加方法。
技术特征:
1.一种船舶总振动预报中脉动压力施加方法,其特征在于,其包括以下步骤:
2.如权利要求1所述的船舶总振动预报中脉动压力施加方法,其特征在于,步骤2中,不同测点的空泡螺旋桨的脉动压力p2的计算公式为:
3.如权利要求2所述的船舶总振动预报中脉动压力施加方法,其特征在于,根据步骤1中p、θ、p1和θ1的数值,得到p2的数值。
4.如权利要求2所述的船舶总振动预报中脉动压力施加方法,其特征在于,步骤2中,空泡螺旋桨的脉动压力p2发生时的相位角θ2的计算公式为:
5.如权利要求4所述的船舶总振动预报中脉动压力施加方法,其特征在于,根据步骤1中p、θ、p1和θ1的数值,得到θ2的数值。
6.如权利要求1所述的船舶总振动预报中脉动压力施加方法,其特征在于,步骤3中,螺旋桨转速为r时的非空泡螺旋桨的脉动压力p1r的计算公式为:
7.如权利要求6所述的船舶总振动预报中脉动压力施加方法,其特征在于,取步骤1中船舶空泡试验报告中测得的非空泡螺旋桨的脉动压力p1的最大值,输入到p1r的计算公式,得到p1r的数值。
8.如权利要求1所述的船舶总振动预报中脉动压力施加方法,其特征在于,步骤3中,螺旋桨转速为r时的空泡螺旋桨的脉动压力p2r的计算公式为:
9.如权利要求8所述的船舶总振动预报中脉动压力施加方法,其特征在于,取步骤2中得到的所有测点的空泡螺旋桨的脉动压力p2的最大值,输入到p2r的计算公式,得到p2r的数值。
10.如权利要求1所述的船舶总振动预报中脉动压力施加方法,其特征在于,步骤4中,船舶总振动预报中脉动压力的施加完毕后,进行船体总振动计算。
技术总结
本发明公开了一种船舶总振动预报中脉动压力施加方法,其特征在于,其包括以下步骤:从船舶空泡试验报告中获取不同测点的总脉动压力P、非空泡螺旋桨的脉动压力P<subgt;1</subgt;、总脉动压力P发生时的相位角θ和非空泡螺旋桨的脉动压力P<subgt;1</subgt;发生时的相位角θ<subgt;1</subgt;的数值;计算不同测点的空泡螺旋桨的脉动压力P<subgt;2</subgt;和空泡螺旋桨的脉动压力P<subgt;2</subgt;发生时的相位角θ<subgt;2</subgt;;计算螺旋桨转速为r时的非空泡螺旋桨的脉动压力P<subgt;1r</subgt;和螺旋桨转速为r时的空泡螺旋桨的脉动压力P<subgt;2r</subgt;;将步骤3得到的P<subgt;1r</subgt;和P<subgt;2r</subgt;的数值施加到船体表面,完成船舶总振动预报中脉动压力的施加。本发明按照脉动压力的不同成份进行分别施加,为船舶的总振动预报结果的准确性提供了可靠合理的施加方法。
技术研发人员:叶旭,赵文斌,王文中,华康,韩斌,熊群飞,金晖,周涵
受保护的技术使用者:上海船舶研究设计院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!